

4 Ходовое оборудование машин для земляных работ.
4.1 Общие сведения.
Ходовое оборудование (движитель) МЗР – это устройство для ее передвижения в рабочем и транспортном режимах и устойчивого опирания на основание во время работы.
В зависимости от условий работы и назначения МЗР в них применяют следующие виды ходового оборудования: гусеничное, пневмоколесное, шагающее, рельсовое, плавучее и комбинированное. Наиболее распространено гусеничное и пневмоколесное ходовое оборудование (экскаваторы, бульдозеры, скреперы, автогрейдеры и др.). шагающее ходовое оборудование применяется при разработке грунтов и полезных ископаемых в карьерах экскаваторами–драглайнами, а также при гидромеханизации земляных работ (шагающие гидромониторы и землесосные установки). Комбинированное ходовое оборудование используют для многоковшовых экскаваторов.
Общие требования к ходовому оборудованию заключаются в обеспечении достаточной силы тяги, необходимых скоростей передвижения, возможно малой массы, плавности хода, минимальных сопротивлений движению, устойчивости машины при всевозможных ее положениях, высокой проходимости, надежности и удобства эксплуатации.
Особенность требований к ходовому оборудованию землеройно-транспортных машин заключается еще и в необходимости развивать силу тяги, достаточную для преодоления сопротивлений не только собственному передвижению, но и копанию. В то же время эти машины должны иметь значительные транспортные скорости, обладать достаточной маневренностью и мобильностью.
Перечисленным требованиям наиболее удовлетворяет пневмоколесное ходовое оборудование со специальными пневматическими шинами, обеспечивающими необходимое сцепление и тяговое усилие в условиях бездорожья.
Сравнительная характеристика основных типов ходового оборудования приведена в таблица 4.1.
Гусеничное ходовое оборудование.
Ходовое оборудование этого вида может быть двух- и многогусеничным. Преимущественно распространены двухгусеничные системы при массе машины до 1000 т. У машин большой массы число гусениц достигает четырех, восьми и даже шестнадцати. Гусеничный движитель изобретен Д. Загряжским в 30-х годах XΙX в.
Гусеничное
ходовое оборудование состоит из движителя
и подвески. Гусеничный движитель
(рис.4.1) включает гусеничную ленту 3,
раму 6,
приводное (ведущее) 5
и ведомое (натяжное) 1
колеса, опорные 7
и поддерживающие 2
катки. В
некоторых случаях применяют гусеничные
движители безрамной конструкции. В этом
с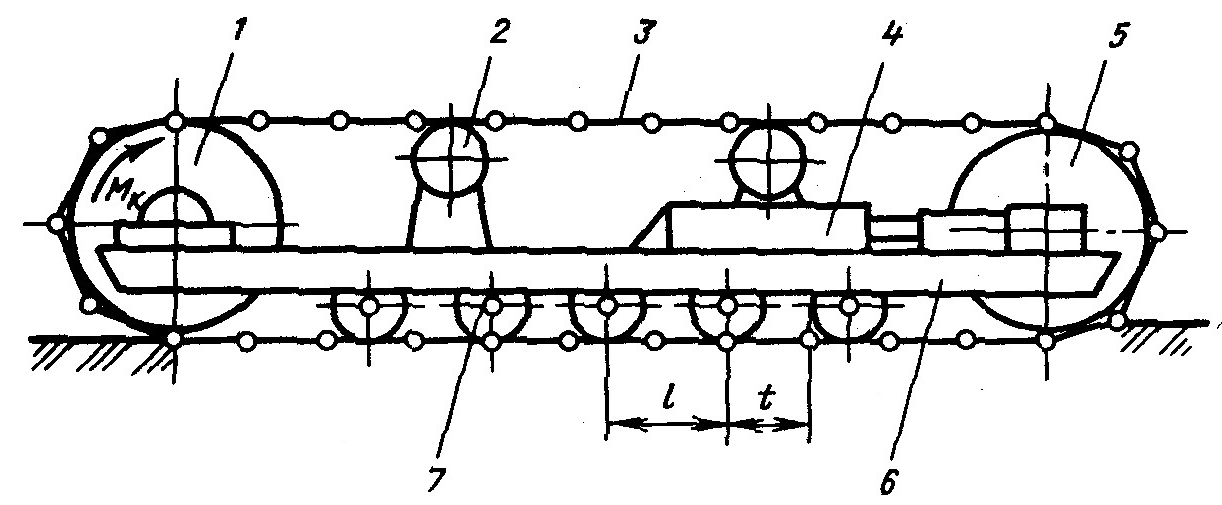 лучае
элементы движителя крепят к основной
раме машины.
лучае
элементы движителя крепят к основной
раме машины.
Рис. 4.1 Многоопорный гусеничный движитель с жесткой подвеской опорных катков.
По конструкции гусеницы делят на многоопорные и малоопорные (рис. 4.2 б), а по приспособляемости к неровностям поверхности передвижения – на жесткие и мягкие (гибкие) (рис. 4.2 в, г).

Рис.4.2. Типы гусениц.
Многоопорные гусеницы имеют сравнительно большое число катков небольшого диаметра непосредственно соединенных с гусеничной рамой. Этот тип подвески наиболее прост, дешев; он обеспечивает равномерное распределение давления на грунт, однако такую подвеску применяют лишь при скоростях движения до 5 км/ч, т.к. жесткая гусеница не приспосабливается к неровностям и не амортизирует толчки и удары при езде по неровной поверхности. Многоопорные гусеницы чаще всего применяют для экскаваторов, работающих на грунтах слабых и средней крепости.
Табл. 4.1. Сравнение основных типов ходового оборудования МЗР.
Ходовое оборудование |
Достоинства |
Недостатки |
Преимущественная область применения |
Гусенич ное |
Универсальность; высокая проходимость; возможность преодоления больших уклонов (до 230); хорошая устойчивость; малое давление на основание (0,04-0,1 МПа). |
Большая масса (с нижней рамой – до 30-40% массы машины); сложность конструкции и быстрый износ деталей; малые транспортные скорости. |
На всех видах МЗР, не требующих больших и частных перемещений с большой скоростью. |
Пневмо колесное |
Высокая скорость передвижения (до 60 км/ч) относительно небольшая масса; высокая маневренность; малое сопротивление передвижению; простота конструкции; универсальность; удобство в эксплуатации. |
Быстрый износ пневмошин при высокой стоимости; относительно высокое давление на основание (до 0,25 МПа) ограниченность нагрузки на колесо. |
На всех видах МЗР малой и средней мощности, особенно на машинах, требующих больших и частых передвижений с большой скоростью и маневренностью. |
Шагаю щее |
Относительно небольшая масса (10-12 %) массы машины; высокая маневренность; низкое давление на основание (30 % от гусеничного); малое число быстроизнашивающихся деталей; устойчивость |
Цикличность и малая скорость передвижения (0,08-0,6 км/ч); необходимость подъема всей машины при шагании; относительно высокое шаговое усилие при шагании (до 25-30 % силы тяжести машины). |
Шагающие драглайны, отвалообразователи, гидромониторы и другие машины, работающие на основаниях с малой несущей способностью и не требующие больших собственных перемещений с большой скоростью. |
Рельсо вые (железнодорож ные) |
Направленность, достаточная скорость и плавность передвижения; малое сопротивление передвижению; незначительный износ элементов и деталей. |
Необходимость и сложность устройства железнодорожных путей; малая маневренность; ограниченность нагрузки на колесо, значительные размеры ходовой части машины; малые величины коэффициента сцепления колес с рельсами и преодолеваемых уклонов (до 6 %). Неуниверсальность. |
Многоковшовые цепные экскаваторы в карьерах. |
Малоопорные гусеницы отличаются малым числом опорных катков большого диаметра и определенной неравномерностью распределения давления на основание по их длине. Они лучше преодолевают препятствия и лучше приспосабливается к неровностям поверхности. Этими качествами обладают и многоопорные гусеницы, у которых опорные катки малого диаметра соединяют в балансирные тележки (мягкая многоопорная гусеница) или вводят демпфирующие устройства - пружины и рессоры.
Для работы машин на грунтах со слабой несущей способностью начинают применять конструкцию гусеничного ходового оборудования с резинометаллической гусеницей. Такая гусеница, представляет собой специальную резиновую ленту, армированную высокопрочной проволокой со штампованными звеньями. Она имеет меньшую массу, лучше приспосабливается к грунтовым условиям, что значительно улучшает проходимость машины.
Конструкция механизма передвижения зависит от типа привода, скорости и маневренности машин. В гусеничных тракторах и быстроходных землеройных машинах на гусеничном ходу (рис. 4.3 а) для включения и выключения гусениц и изменения их линейных скоростей служат бортовые фрикционы, причем во многих конструкциях левую и правую гусеницы включают в разные стороны, что дает возможность совершать поворот машины на месте. Такие же возможности имеют машины с индивидуальным приводом гусениц (рис. 4.3 в).
В тихоходных машинах на гусеничном ходу (одноковшовые экскаваторы с механическим приводом) ведущие колеса приводятся во вращение зубчатыми и цепными передачами (рис. 4.3 б). включают и выключают их кулачковыми муфтами, что возможно лишь при остановке машины.

Рис.4.3 Механизмы передвижения гусеничных и колесных машин.
У гусеничного ходового оборудования из-за относительно большого числа трущихся деталей сопротивление передвижению машины в значительной степени зависит от внутреннего сопротивления гусениц, которое слагается из сил сопротивления в подшипниках опорных катков, ведущих и направляющих колес, катанию опорных катков, изгибанию гусеничных цепей на ведущих и направляющих колесах, движению верхней части цепи по поддерживающим каткам.
Поскольку сопротивление передвижению машины Pf зависит еще и от состояния опорной поверхности, то в практических расчетах при его определении используется коэффициент сопротивления движению, полученный на основании экспериментальных испытаний (таблица 4.2). В этом случае:
![]() ;
(4.1)
;
(4.1)
где Gm – вес машины, f – коэффициент сопротивления движению.
Движущая сила гусеничного движителя:
![]() ;
(4.2)
;
(4.2)
где Me – крутящий малый на выходном валу силовой установки; iм – передаточное число трансмиссии; ηм – КПД трансмиссии; r0 – радиус начальной окружности ведущего колеса движителя.