

1.4 Теоретические сведения
В магнитных усилителях используется свойство катушки с ферромагнитным сердечником изменять индуктивное сопротивление при подмагничивании сердечника постоянным током.
Магнитные усилители применяются как в точных измерительных устройствах мощностью в несколько долей ватта, так и в схемах автоматического управления крупными производственными агрегатами (мощностью до 10 кВт и больше).
Магнитные усилители используются для управления и регулирования величины тока, напряжения, полного сопротивления, мощности, частоты вращения, частоты, температуры и пр.
В обычном исполнении самый простой дроссельный магнитный усилитель (МУ) состоит из двух пакетов стали, на каждом из которых размещаются обмотки переменного тока, а обмотки управления (постоянного тока) охватывают оба пакета.
Разрез дроссельного МУ с одной обмоткой управления, выполненного на Ш-образной стали, и схема соединения его обмоток показаны на рисунке 2 (а, б). Обмотки переменного тока ω~A и ω~В подключены здесь последовательно с нагрузкой к сети переменного тока (возможно и параллельное соединение рабочих обмоток между собой и нагрузкой). Эти обмотки создают потоки ФА и ФБ в сердечниках, которые в свою очередь наводят э. д. с. еА и еБ в обмотке управления. Так как эти э. д. с. равны и направлены встречно, то ток от э. д. с. еА
и еБ в обмотке управления равен нулю.
Изменяя напряжение uу и ток iy обмотки управления, можно изменять напряженность магнитного поля в сердечниках, а следовательно, их индуктивности.
В переходном процессе при приложении к обмотке управления ступенчатого сигнала для цепи управления можно записать:
![]()
Проинтегрировав и заменив iу=Iу.ср:
![]()
где Ф1 – поток ФА при ωt=0.
Дифференциал потока Ф1 связан с дифференциалом выходного напряжения
следующим соотношением:
![]()
где ω*~ = ω~A= ω~Б при последовательном соединении рабочих обмоток.

Рисунок 2 – Магнитный усилитель
Среднее значение напряжения управления:
![]()
Таким образом получаем:

где Uвых и Uy – средние значения напряжения на сопротивлениях rвых и ry.
Здесь коэффициент усиления по напряжению:
![]()
Постоянная времени:

Итак, простейший дроссельный МУ с активной нагрузкой в динамике эквивалентен по действию апериодическому звену. Этот вывод приблизительно справедлив и для дроссельных МУ, выполненных из обычных электротехнических сталей.
Однако в последнем случае, если имеет место изменение сигналов на входе и выходе в широком диапазоне, следует считаться с криволинейностью статической токовой характеристики МУ (рисунок 3). Коэффициент усиления по току, определенный как:
изменяется в этом случае в широком диапазоне и лишь на приблизительно прямолинейном участке токовой характеристики остается постоянным. Такой МУ может описываться дифференциальным уравнением первого порядка, коэффициенты которого зависят от тока в обмотке управления,
![]()
По существу это нелинейное уравнение, и сам усилитель является нелинейным элементом.

Рисунок 3 – Статическая токая характеристика МУ
Ниже рассматриваются применяемые в усилителях токовые обратные связи.
Внешняя положительная обратная связь по току - это такое соединение выхода со входом усилителя, при котором выпрямленный сигнал, пропорциональный выходному току, подаваясь в одну из обмоток управления, увеличивает подмагничивание усилителя с ростом нагрузки. В этом случае часть энергии, необходимой для подмагничивания, потребляется от источника переменного тока (рисунок 4, а). Мощность источника управления при этом уменьшается и, следовательно, растет коэффициент усиления усилителя. Поэтому обычно внешняя положительная токовая связь применяется для повышения коэффициентов усиления МУ.

Рисунок 4 – Характеристика МУ
Запишем равенство ампер-витков с учетом внешней токовой связи:
![]()
Здесь Io.c, ωо.с - ток и витки обмотки обратной связи;
Icp~ -среднее значение переменного тока.
Считая обратное сопротивление выпрямителей равным бесконечности, можно принять:
![]()
Таким образом, получим:
![]()
Коэффициент усиления по току усилителя с обратной связью будет равен:

Если усиливать обратную связь, увеличивая ωо.с, то КI будет возрастать.
То же самое относится и к коэффициенту усиления по мощности. Действительно, при активной нагрузке:

Коэффициент обратной связи Ко.с вводится как отношение напряженности поля обратной связи к напряженности поля переменного тока:

На рисунке 4 (а, б) представлены электрическая схема и кривая среднего тока нагрузки Iнагр(Iy) для усилителя без обратной связи (кривая 1). Прямая 2 представляет здесь средний ток обмотки обратной связи I’~oc, приведенный к обмоткам переменного тока:
![]()
Если из абсцисс кривой 1 вычесть абсциссы прямой 2, то получится характеристика усилителя с обратной связью (кривая 3). Коэффициенты усиления по току и мощности, соответствующие рабочей части кривой 3, возрастут, однако следует помнить, что введение обмотки обратной связи ωo.с увеличивает инерционность усилителя.
Кроме внешней обратной связи получила применение внутренняя обратная связь. Внутренняя обратная связь по току осуществлена в схеме на рисунке 5 (а). Эта схема обеспечивает в сопротивлении нагрузки rнaгр протекание пульсирующего тока iн постоянного направления. Предполагается, что обмотка управления имеет весьма большое сопротивление, а выпрямители считаются идеальными.
Пусть при ωt=0 магнитный поток второго сердечника ФБ равен потоку насыщения Фнас, а поток первого сердечника ФА равен потоку Ф1, зависящему от н. с. обмотки управления. Пусть также при нарастании напряжения сети uс потоки в первом и втором сердечниках начнут изменяться и первый сердечник насыщается, а поток во втором становится равным потоку Ф1. Тогда через обмотку ωA потечет ток:

Когда напряжение сети меняет знак, картина повторяется, но сердечники меняются ролями.
Из рассмотрения кривых на рисунке 5 (б) следует, что в каждой обмотке переменного тока протекает ток, имеющий переменную и постоянную составляющие. Первая обусловливает существование э. д. с. самоиндукции, уравновешивающей часть внешнего напряжения, а вторая (постоянная) подмагничивает МУ, выполняя функцию положительной токовой обратной связи.
Приближенно можно записать:
![]()
где Ucp, Uм.у.ср, Iн.ср - средние значения питающего напряжения, напряжения на МУ и тока нагрузки.
Напряжение на МУ определяется амплитудой переменной составляющей потока 1/2(Фнас-Ф1) и определяется как:
![]()
Коэффициент обратной связи:

т.к. Io.c≈Icp~ и ωо.с≈ω~. Фактически Ко.c немного меньше единицы за счет наличия небольшого обратного тока в выпрямителях. Заметим, что изменять коэффициент внутренней обратной связи в схеме на рисунок 5 (a) невозможно.
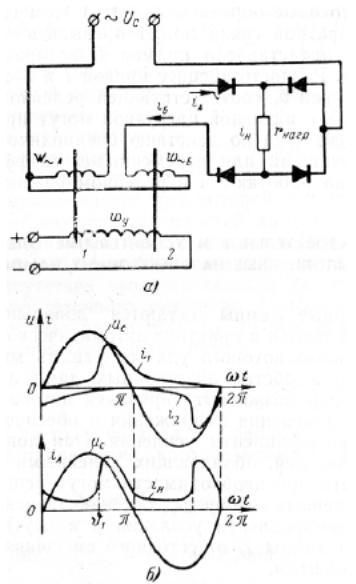
Рисунок 5 – Кривые токов и напряжений
Преимуществом схемы с внутренней обратной связью является отсутствие
специальной обмотки обратной связи. При этом, однако, число витков рабочих обмоток переменного тока должно быть вдвое большим, чем в усилителях с последовательным соединением обмоток переменного тока при прочих равных условиях. Этот усилитель позволяет увеличить выходную мощность в 2 раз по сравнению с усилителем, имеющим внешнюю токовую обратную связь при одинаковых схемах обмоток управления и габаритах.
Для получения релейного режима работы усилителя выполняют в одном усилителе внутреннюю и слабую внешнюю токовые обратные связи. В этом случае коэффициент обратной связи может превысить единицу. На рисунке 4 (б) представлена прямая 4, которая построена при Ко.с>1. Разность абсцисс кривой 1 и прямой 4 приводит к кривой 5, соответствующей релейному режиму.
В МУ с положительной обратной связью, ток Iн возрастает уже при Iy=0 (кривая 1, рисунок 6), что создает неудобства при управлении. В связи с этим в усилителях предусматривают смещение характеристик вдоль оси абсцисс, для того, чтобы получить минимум тока Iн при Iy=0 (кривая 2, рисунок 6). Для этой цели служит обмотка смещения МУ.

Рисунок 6 – Характеристика управления с положительной обратной связью
Динамические свойства МУ определяются в основном инерционностью цепей управления. Магнитные усилители, как правило, представляются апериодическим звеном первого порядка с передаточной функцией:


где


При наличии нескольких обмоток управления, включая и обмотку смещения:

где Tyi - постоянная времени i-ой обмотки, определяемая по вышеприведенным формулам;
ryi, ri - сопротивление обмотки и полное сопротивление цепи обмотки с учетом добавочных резисторов.