

Перелік прийнятих позначень
ТО – технологічне обладнання
ОТО – основне технологічне обладнання
ДТО – допоміжне технологічне обладнання
ОМ – об’єкт маніпулювання
ПР – промисловий робот
ТС – тактовий стіл
ППП – проміжна позиція перезахвату
ГВК – гнучка виробнича комірка
Пр – пристосування
РП – робоча позиція
СК – система координат
Сх – схват
СхПР – схват промислового робота
ЧПУ – числове програмне управління
Вихідні дані
Вихідні дані, отримані в результаті виконання курсового проекту
(варіант №35):
ПР: промисловий робот циліндричної системи координат мод. М20.П40.01.СО6 (рис.1).
РП 1,5,6,8: тактовий стіл мод. СТ 150 (рис.2).
![]() =
1340;
=
1340;
![]() =
780;
=
780;
![]() =
1040;
=
1040;
![]() =
1060;
=
1060;
Кінематичний ресурс q = 580;
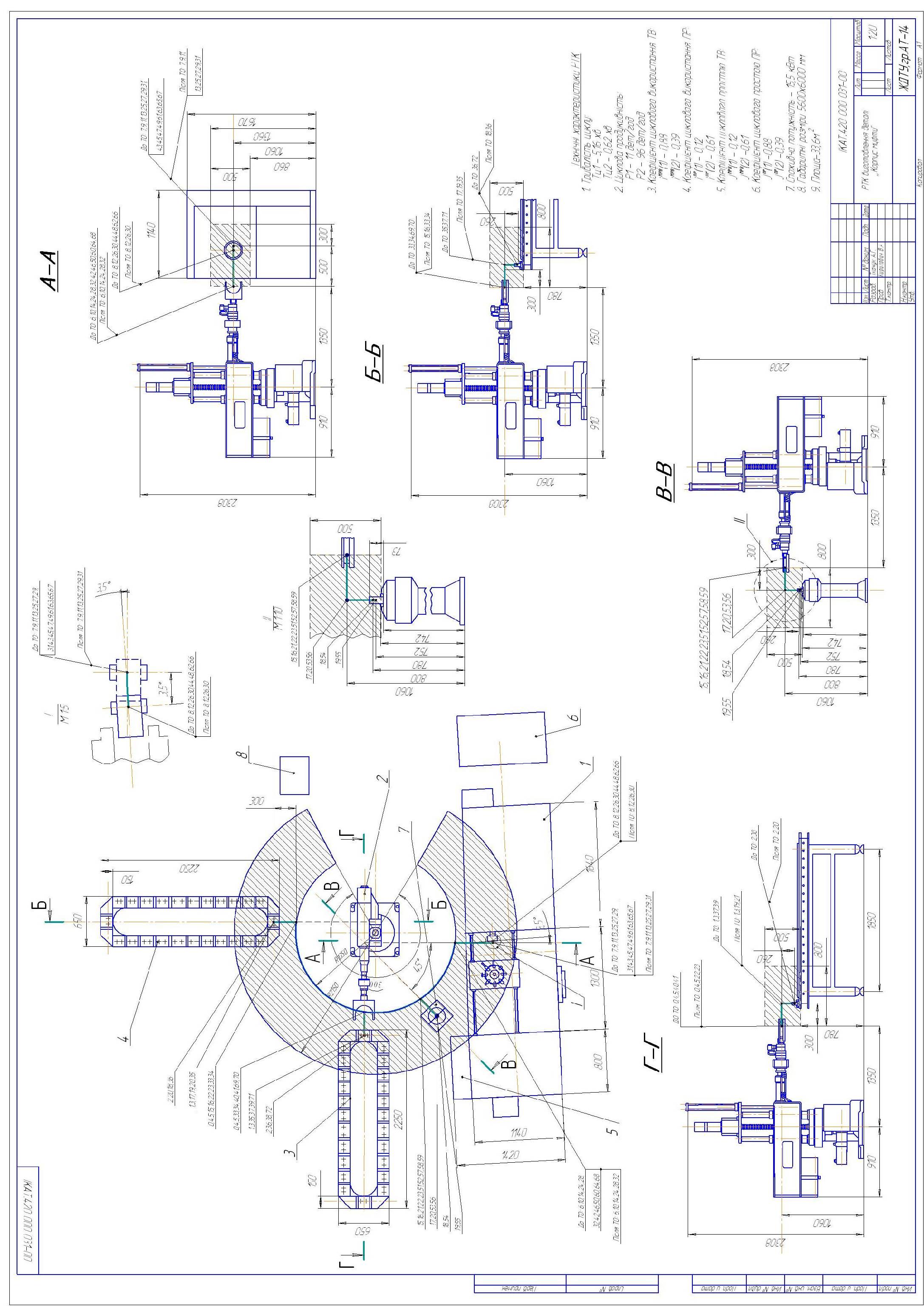
РП 2,4,7: токарно-револьверний верстат мод. 1В340Ф3О з системою числового програмного управління «Електроніка НЦ-31» (рис.3).
![]() =
1520;
=
1520;
![]() =
1060;
=
1060;
![]() =
1040;
=
1040;
![]() =
1060;
=
1060;
Кінематичний ресурс q = 480;
РП 3: проміжна позиція перезахвату (стійка) (рис.4)
![]() =
1340;
=
1340;
![]() =
780;
=
780;
![]() =
1040;
=
1040;
![]() =
1060;
=
1060;
Кінематичний ресурс q = 580;
Сумарний використовуваний кінематичний ресурс в курсовому проекті склав q∑ = 1640 мм.
Креслення планування РТК за варіантом №35 курсового проекту з ТіАДВ приведено на рис. 5
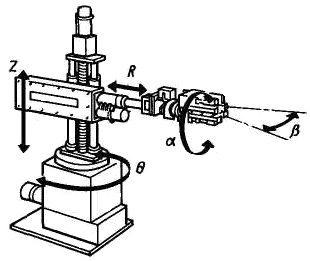
Рис. 1. Промисловий робот М20.П40.01.СО6

Рис. 2. Ескіз тактового столу СТ.150

Рис. 3. Токарно-револьверний верстат мод. 1В340Ф3О
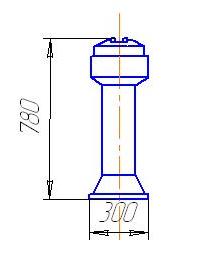
Рис. 4. Ескіз стійки для перезахвату заготовки

2. Теоретичні відомості
Аt-метод являє собою набір методик визначення опорних точок позиціонування СхППР, які використовуються в залежності від взаємного розташовання РПt в РЗ ППР.
Вказаний пошук перетинів змістовно відтворює І – ІV рівні деталізації синтезу опорних точок РМТ (див. рис. 6). Загальним для визначення опорних точок за даним методом є визначення множин як таких опорних точок та форми взаємного розташування множин кінцевих опорних точок {CtПР} в СК ПР.
На V
рівні в залежності від форми перетину
![]() використовуються два методи пошуку
опорних точок – це повний перебір
(ES)
та математичне очікування
(MЕ).
Подана конкретизація використання ES
та ME
відтворює VI
рівень At-методу.
Метод повного перебору ES
використовується для всіх форм перетинів
і полягає у переборі кожної початкової
точки АtіПР
кожної множини {АtПР}
зі всіма кінцевими {CtПР}
всіх РП з подальшим визначенням пари
точок, що мають найменші затрати
кінематичного ресурсу.
використовуються два методи пошуку
опорних точок – це повний перебір
(ES)
та математичне очікування
(MЕ).
Подана конкретизація використання ES
та ME
відтворює VI
рівень At-методу.
Метод повного перебору ES
використовується для всіх форм перетинів
і полягає у переборі кожної початкової
точки АtіПР
кожної множини {АtПР}
зі всіма кінцевими {CtПР}
всіх РП з подальшим визначенням пари
точок, що мають найменші затрати
кінематичного ресурсу.
Метод математичного очікування використовується в залежності від форми взаємного розташування множин {CtПР} і поділяється на такі різновиди:
 використовується
при повному та частковому перетинах і
однокоординатному
характеру пошуку опорних точок. Полягає
у визначенні множини початкових точок
{
використовується
при повному та частковому перетинах і
однокоординатному
характеру пошуку опорних точок. Полягає
у визначенні множини початкових точок
{ ПР}
для всіх точок з однаковими координатами
ХСПР
всіх кінцевих точок множин {
ПР}
для всіх точок з однаковими координатами
ХСПР
всіх кінцевих точок множин { }.
За результатами пушуку вибирається
пара опорних точок позиціонування
СхППР, які є спільними для всіх РП;
}.
За результатами пушуку вибирається
пара опорних точок позиціонування
СхППР, які є спільними для всіх РП; використовується
при повному та частковому перетинах і
при всіх характерах пошуку опорних
точок. Полягає у визначенні множини
початкових точок {
ПР}
для всіх точок з однаковими координатами
ХСПР
всіх кінцевих точок множин {
}.
За результатами пушуку вибирається
спільна початкова опорна точка
позиціонування СхППР
використовується
при повному та частковому перетинах і
при всіх характерах пошуку опорних
точок. Полягає у визначенні множини
початкових точок {
ПР}
для всіх точок з однаковими координатами
ХСПР
всіх кінцевих точок множин {
}.
За результатами пушуку вибирається
спільна початкова опорна точка
позиціонування СхППР  та різні кінцеві {CtПР};
та різні кінцеві {CtПР}; використовується
при всіх
формах перетинів
і
при всіх характерах пошуку опорних
точок. Полягає у визначенні однієї
точки АtПР
із кожної з множин {АtПР}
з подальшим пошуком кінцевої точки
CtПР
для кожної з РП за критерієм мінімуму
кінематичного ресурсу;
використовується
при всіх
формах перетинів
і
при всіх характерах пошуку опорних
точок. Полягає у визначенні однієї
точки АtПР
із кожної з множин {АtПР}
з подальшим пошуком кінцевої точки
CtПР
для кожної з РП за критерієм мінімуму
кінематичного ресурсу; як і попередній використовується при
всіх формах перетинів
і
при всіх характерах пошуку опорних
точок. Полягає у визначенні однієї
точки
як і попередній використовується при
всіх формах перетинів
і
при всіх характерах пошуку опорних
точок. Полягає у визначенні однієї
точки  ПР
з усіх точок всіх множин {АtПР}
з подальшим пошуком кінцевої точки
CtПР
для кожної з одиниць ТО за критерієм
мінімуму кінематичного ресурсу;
ПР
з усіх точок всіх множин {АtПР}
з подальшим пошуком кінцевої точки
CtПР
для кожної з одиниць ТО за критерієм
мінімуму кінематичного ресурсу; – використовуєтся для
другого і третього виду перетину і для
різнокоординатного характеру пошуку
опорних точок. Полягає у визначенні
однієї точки
– використовуєтся для
другого і третього виду перетину і для
різнокоординатного характеру пошуку
опорних точок. Полягає у визначенні
однієї точки  ПР
із кожної з пар множин {АtПР}
з подальшим пошуком для кожної з РП
кінцевої точки CtПР
за критерієм мінімуму кінематичного
ресурсу;
ПР
із кожної з пар множин {АtПР}
з подальшим пошуком для кожної з РП
кінцевої точки CtПР
за критерієм мінімуму кінематичного
ресурсу; –
використовуєтся
тільки для третього виду перетину і
для різнокоординатного характеру
пошуку опорних точок. Полягає у визначенні
двох точок
–
використовуєтся
тільки для третього виду перетину і
для різнокоординатного характеру
пошуку опорних точок. Полягає у визначенні
двох точок  ПР
та
ПР
та  ПР
шляхом математичного очікування з
найбільш віддалених та найближчих
точок множин {АtПР
}.
Найбільш віддалені, як і найближчі
точки, вибираються по одній з кожної
із множин з попередньо побудованої
точкової діаграми координат множин
{АtПР}.
ПР
шляхом математичного очікування з
найбільш віддалених та найближчих
точок множин {АtПР
}.
Найбільш віддалені, як і найближчі
точки, вибираються по одній з кожної
із множин з попередньо побудованої
точкової діаграми координат множин
{АtПР}.
Кінцевим VII рівнем (U) At-методу є об’єднання (U) результатів, знайдених різними методами, і вибір опорних точок позиціонування СхППР з найменшим кінематичним ресурсом (реалізація U-методик).
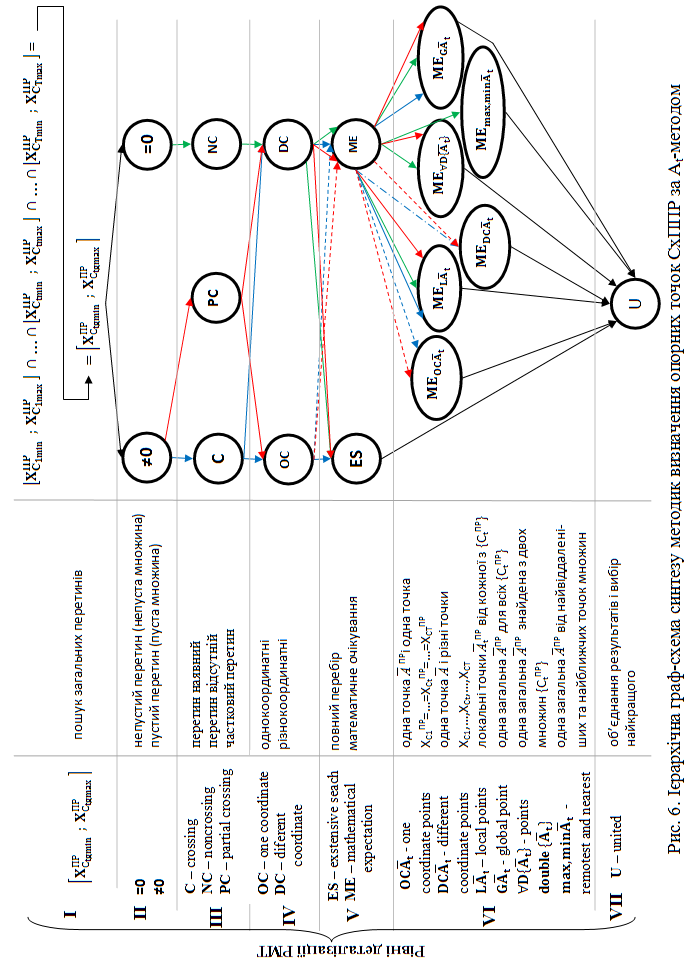
Більш детально At-метод представлено на рис. 6. Тут кожен з напрямків (гілок) визначення опорних точок позиціонування СхППР для кожної з форм взаємного розташування множин {CtПР} виділено окремим кольором стрілок. Стрілки, що позначені пунктирними лініями, вказують на види маточікування, які використовуються виключно при однокоординатному характеру пошуку опорних точок СхППР, а стрілки з лініями оссьового характеру – на маточікування, які використовуються виключно при різнокоординатному характеру пошуку точок. Формалізовані описи кожного з методів пошуку подано в додатках.