

2. Определение собственной видимости ребер многогранника
Для определения видимости элементов чертежа используется метод конкурирующих точек. Напомним, что конкурирующими называются точки, лежащие на одной проецирующей прямой.
|
Рисунок 51 |
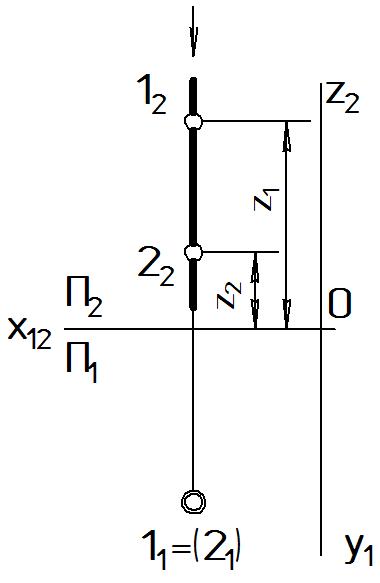
Вопрос о видимости этих точек на П1, где обе точки проецируются в одну, решается следующим образом: из двух совпадающих проекций конкурирующих точек, лежащих на одной горизонтально-проецирующей прямой видна та, высота (z) которой больше (или видна та точка, которая расположена дальше от П1 по ходу проецирования, показанного стрелкой). Посмотрим на П2 высота какой точки больше? Для этого сравним координаты z проекций 12 и 22. z1 z2, то есть высота точки 1 больше. Следовательно, на плоскости П1 проекция 11 видима, невидимую точку (21) заключаем в скобки. Действительно по ходу проецирования первой будет получена проекция 21, затем 11, так как 12 расположена дальше от П1.
|
Рисунок 52 |
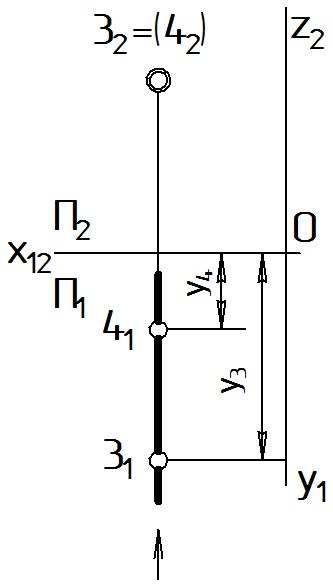
Вопрос о видимости этих точек на П2 решается следующим образом: из двух совпадающих проекций конкурирующих точек, лежащих на одной фронтально-проецирующей прямой видна та, глубина (y) которой больше (или видна та точка, которая расположена дальше от П2 по ходу проецирования, показанного стрелкой).
Посмотрим на П1 глубина какой точки больше? Для этого сравним координаты y проекций 31 и 41. y3 y4, то есть глубина точки 3 больше, следовательно, 32 видима, невидимую точку (42) заключаем в скобки. Действительно по ходу проецирования первой будет получена проекция 42, затем 32, так как 31 расположена дальше от П2.
Рассмотрим определение видимости ребер многогранника на примере четырехугольной пирамиды. Порядок определения видимости проекций следующий:
|
Рисунок 53 |
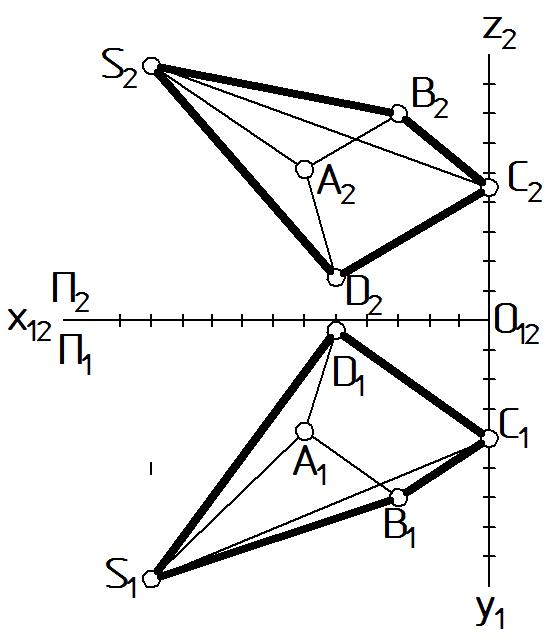
Очерковыми называются линии, по отношению к которым все точки изображаемого объекта расположены по одну сторону. Эти линии видны всегда.
Для пирамиды на П2 видима фронтальная очерковая S2 B2 C2 D2 S2, на П1 - горизонтальная очерковая S1 D1 C1 B1 S1 замкнутые ломаные линии (Рис. 53).
Этап 2. Определить видимость ребер внутри очерка на горизонтальной плоскости проекций П1.
На П1 возьмем пару конкурирующих точек, принадлежащих скрещивающимся ребрам пирамиды. Пусть 1 [АВ] и 2 [SC]. На П1 проекции этих точек 11 и 21 совпадают (Рис. 54).
|
Рисунок 54 |
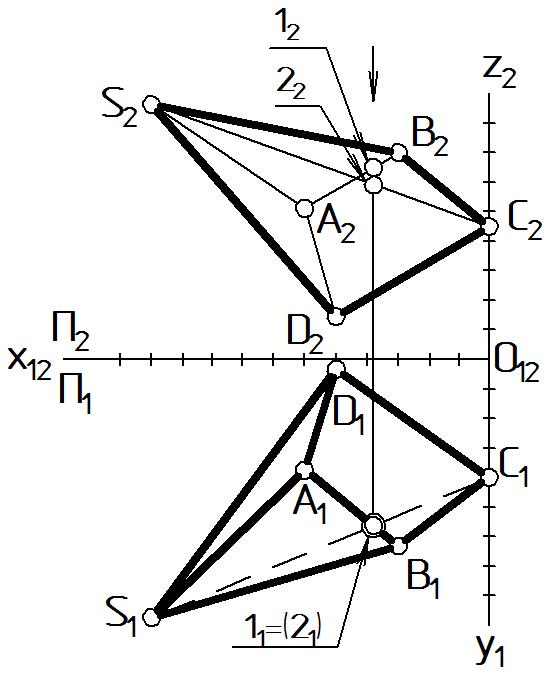
Таким образом, на чертеже в плоскости П1 видна проекция точки 11 и проекция ребра, к которому она относится - [А1В1]. Ребро обозначается основной линией. Невидимая на П1 проекция 21 принадлежит ребру [S1C1], следовательно это ребро невидимое и обозначается штриховой линией.
Внутри очерка остались ребра [А1D1], [S1A1], они видимые, поскольку имеют общую с видимым ребром [А1В1] вершину A1.
|
Рисунок 55 |
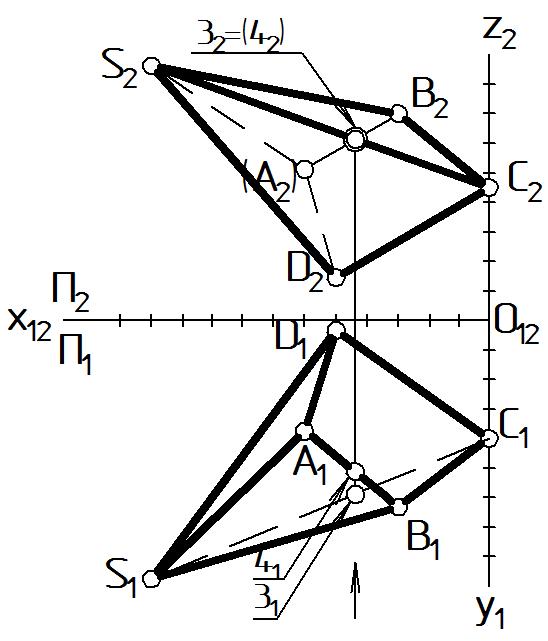
На П2 возьмем пару конкурирующих точек, принадлежащих скрещивающимся ребрам пирамиды. Пусть 3 [SC] и 4 [АВ]. На П2 проекции этих точек 32 и 42 совпадают (Рис. 55). Вопрос их видимости решается на П1: глубина точки 31 больше, чем у 41 (координата y3 y4), следовательно, точка 3 расположена в пространстве перед точкой 4 и прикрывает ее собой (см. Рис. 52).
По видимости проекций точек определяется видимость соответствующих ребер на П2. Ребро [S2C2] видимое, ребро [А2В2] и пересекающиеся с ним в вершине А2 ребра [А2D2], [S2A2] – невидимые.
|
|
Рисунок 56 |
|
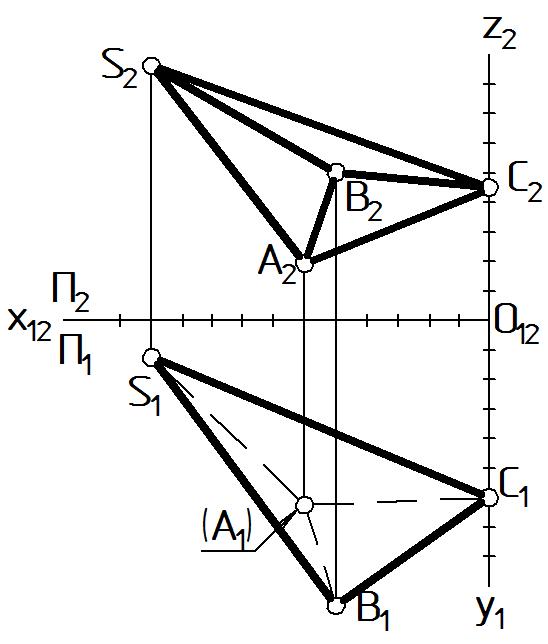
Этап 1. На П2 видима фронтальная очерковая S2 C2 А2 S2, на П1 - горизонтальная очерковая S1 C1 B1 S1 замкнутые ломаные линии.
Этап 2. Плоскость П1: внутри очерка нет скрещивающихся ребер, три пересекающиеся ребра [S1А1], [C1А1], [B1А1] будут иметь одинаковую видимость, определяемую видимостью общей вершины А1. Вопрос видимости для А1 решается на П2. Проекция точки А1 расположена ниже всех вершин пирамиды (координата zА = min), следовательно, точка А расположена в пространстве ниже точек фигуры, следовательно, А1 - невидимая .
Этап 3. Плоскость П2: внутри очерка нет скрещивающихся ребер, три пересекающиеся ребра [S2В2], [C2В2], [А2B2], будут иметь одинаковую видимость, определяемую видимостью общей вершины B2. Вопрос видимости для B2 решается на П1. Проекция точки B2 имеет наибольшую глубину среди всех вершин пирамиды (координата yB = max), следовательно, точка B2 видимая.
|
Рисунок 57 |
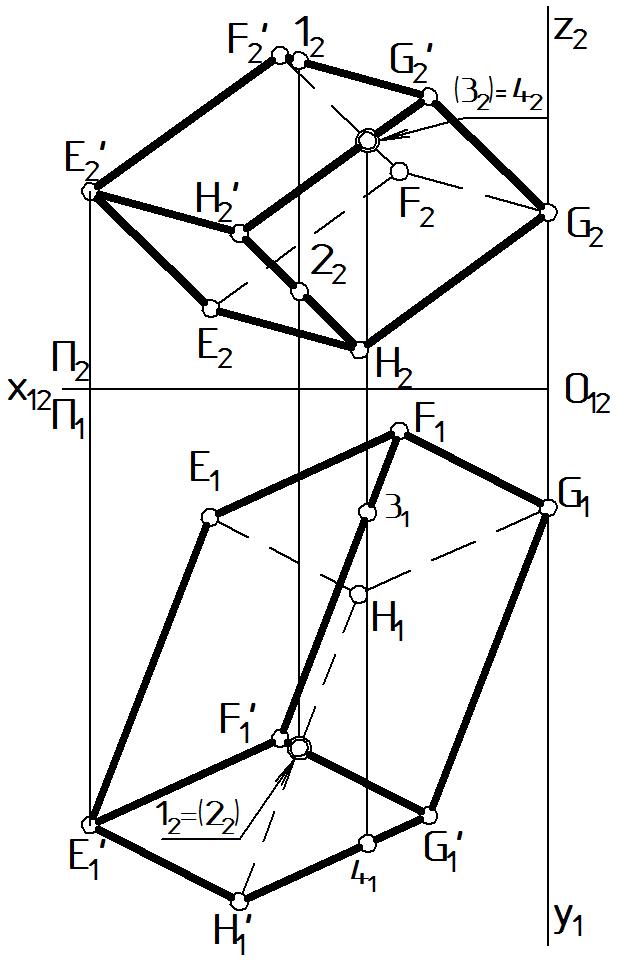
Этап 1. На П2 видима фронтальная очерковая E2 E2’ F2’ G2’ G2 H2 E2, на П1 - горизонтальная очерковая E1 F1 G1 G1’ H1’ E1’ E1 замкнутые ломаные линии.
Этап 2. Плоскость П1. На П1 возьмем пару конкурирующих точек, принадлежащих скрещивающимся ребрам пирамиды. Пусть 1 [E’G’] и 2 [G’H’]. На П2 проекция точки 12 расположена выше проекции 22 (координата z1 > z2), следовательно, точка 1 расположена в пространстве выше точки 2. Таким образом, на плоскости П1 видна проекция точки 11 и проекция ребра, к которому она относится - [E1’G1’]. Видимость остальных ребер понятна из чертежа.
Этап 3. Плоскость П2.На П2 возьмем пару конкурирующих точек, принадлежащих скрещивающимся ребрам пирамиды. Пусть 3 [FF’] и 4 [G’H’]. На П2 проекции этих точек 32 и 42 совпадают. Вопрос их видимости решается на П1: глубина точки 41 больше, чем у 31 (координата y4 y3), следовательно, точка 4 расположена в пространстве перед точкой 3 и прикрывает ее собой. По видимости проекций точек определяется видимость соответствующих ребер на П2. Ребро [G2’H2’] видимое. Видимость остальных ребер понятна из чертежа.