

Министерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Институт ЭНИН
Направление подготовки (специальность) 140400
Кафедра ЭПЭО
Индивидуальное задание
«Математическое моделирование замкнутой электромеханической системы «ШИП-ДПТ НВ» аналитическими и численными методами»
по дисциплине Математическое моделирование
(Название дисциплины)
Выполнил студент гр. 5А1Л _________ Раков И.В.
(Номер группы) (Подпись) (Ф.И.О.)
Проверил доцент кафедры ЭПЭО Глазырин А.С.
(Степень, звание, должность) (Ф.И.О.)
Дата проверки _____ __________ 2014г.
Оценка ___________
Подпись ___________
Томск 2014 г.
Оглавление
1. Составление функциональных и блочных схемы одноконтурной и двухконтурной замкнутых ЭМС 3
2. Расчет основных параметров и коэффициентов, необходимых для моделирования 3
3. Составление структурной схемы ЭМС 5
4. Настройка регулятора скорости 6
5. Составление в нормальной форме Коши системы дифференциальных уравнений, описывающих состояние ЭМС 9
6. Составление системы дифференциальных уравнений, описывающие состояние ЭМС, в матричной форме 10
7. Решение задачи Коши для ненагруженной ЭМС с нулевыми начальными условиями классическим способом. 10
8. Применение прямое преобразование Лапласа с ненулевыми начальными условиями получить СЛАУ, описывающих состояние ЭМС с использованием изображений управляющего воздействия и переменных СЛАУ. Получение изображения переменных состояния при пуске ненагруженной ЭМС 18
9. Использование обратного преобразования Лапласа с ненулевыми начальными условиями для нахождения аналитической функции, описывающего переходный процесс реверса ненагруженной ЭМС с номинальной частотой вращения ДПТ НВ 22
10. Применение определителя Вандермонда для получения аналитической функции, описывающие переходные процессы пуска ненагруженной ЭМС до номинальной частоты вращения ДПТ НВ 25
12.Определения показателей качества для аналитических функций скорости двигателя от времени рассмотренных методов 28
13.Решение задачи Коши методом Нюстрема. 38
14. Моделирование двухконтурной ЭМС в программной среде MATLAB Simulink c ограничением тока якоря ДПТ НВ 40
15. Сравнительный анализ различных методов математического моделирования ЭМС 41
Список литературы 42
Цель работы: получить навыки аналитического и численного моделирования электромеханических систем на примере замкнутой системы автоматического регулирования скорости двигателя постоянного тока с независимым возбуждением.
Составление функциональных и блочных схемы одноконтурной и двухконтурной замкнутых эмс
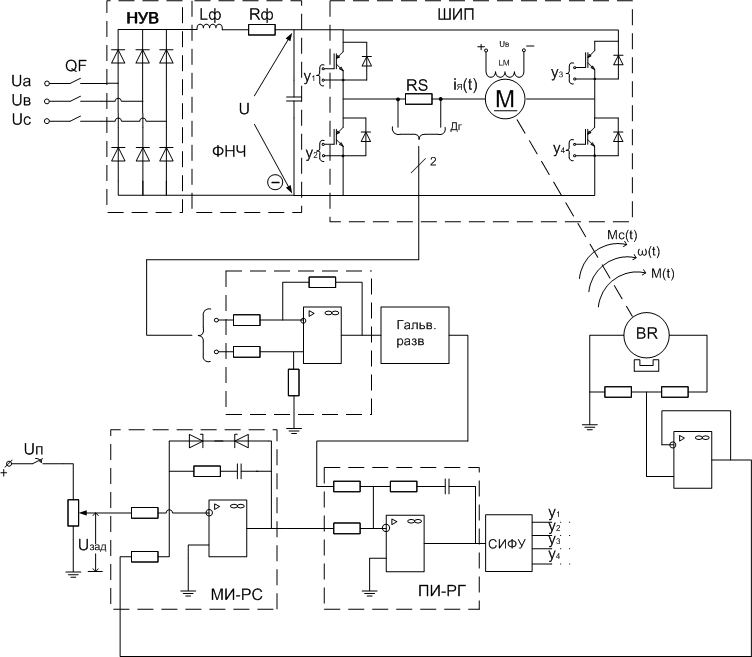
Рисунок 1 – Функциональная схема замкнутой двухконтурной ЭМС на базе ДПТ с НВ

Рисунок 2 – Блок-схема регулируемого электропривода постоянного тока
UЗАД
– напряжение задания, UОС
– напряжение обратной связи,
![]() - ошибка регулирования, UУ
– напряжение управления силовым
преобразователем,
- ошибка регулирования, UУ
– напряжение управления силовым
преобразователем,
![]() - скорость двигателя постоянного тока
, МС
– момент сопротивления механической
нагрузки.
- скорость двигателя постоянного тока
, МС
– момент сопротивления механической
нагрузки.
Расчет основных параметров и коэффициентов, необходимых для моделирования
1.2. Выбор и расчет параметров двигателя
По варианту выбираем двигатель постоянного тока с независимым возбуждением (ДПТ НВ) 2ПФ200МГУХЛ4; номинальная мощность РН=22 кВт; номинальное напряжение UН=220 В. Паспортные данные двигателя:
Номинальное
значение скорости вращения двигателя:
![]()
Максимальное
значение скорости вращения двигателя:
![]()
КПД:
![]()
Сопротивление
обмотки якоря при температуре 150С:
![]()
Сопротивление
обмотки дополнительных полюсов при
температуре 150С:
![]()
Индуктивность
двигателя:
![]()
Момент инерции
двигателя:
![]()
Номинальный ток двигателя:

Номинальная угловая скорость двигателя:
![]()
Сопротивление двигателя в горячем состоянии:
![]()
Коэффициент ЭДС и электромагнитного момента при номинальном потоке возбуждения:

Постоянная времени якорной цепи:
1.3. Расчет момента инерции механической системы и канала обратной связи
Эквивалентный момент инерции электромеханической системы:
![]()
Коэффициент усиления в канале обратной связи:

1.4. Расчет силового преобразователя
Коэффициент передачи преобразователя:
 .
.
1.5. Расчет ПИ-регулятора
Принимаем пропорционально-интегральную (ПИ) структуру регулятора.
Коэффициент пропорциональной части примем: kР=1.
Постоянную времени ПИ-регулятора выбираем так чтобы перерегулирование было не больше 5%:
![]()