

Загальні відомості про координатно-вимірювальні машини
Координатно-вимірювальні машини (КВМ) – це засоби вимірювання, призначені для визначення геометричних параметрів деталі шляхом вимірювання координат окремих точок поверхні деталі у прийнятій системі координат з наступною математичною обробкою виміряних координат для визначення лінійних та кутових розмірів, відхилень форми та розташування. Зокрема, на КВМ можна вимірювати відхилення форми (відхилення від прямолінійності, площинності, круглості, циліндричності) та відхилення розташування поверхонь (відхилення від паралельності, перпендикулярності, ухилу, симетричності, співвісності, позиційні відхилення та ін.).
Конструктивні елементи та компоновки КВМ. До складу КВМ входять пристосування для встановлення деталі, що вимірюється, прецизійні вузли координатних переміщень, приводи переміщень, вимірювальні перетворювачі лінійних та кутових переміщень, вимірювальні головки, вузли віброізоляції та ін [1]. Основні конструктивні елементи КВМ наведені на рис.2.1 [2].
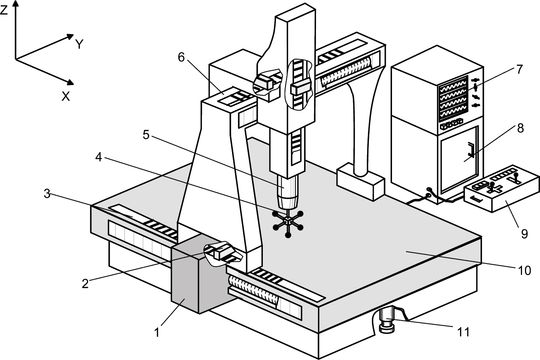
Рисунок 2.1 – Конструктивні елементи КВМ:
1 – привод переміщення вздовж осі Х; 2 – система зчитування;
3 – блок перетворення координат для осі Х (обертів приводу в лінійні одиниці);
4 – вимірювальна головка; 5 – піноль; 6 – опори; 7 – цифрова індикація (дисплей); 8 – електронний блок; 9 – пульт управління; 10 – вимірювальний стіл для розміщення деталі; 11 – віброізоляційні опори
Компоновка КВМ залежить від габаритних розмірів і маси деталей; розташування вимірюваних поверхонь; необхідного числа координатних переміщень; необхідної точності вимірювань та ін.
Розрізняють компоновки КВМ з нерухомою та рухомою деталлю в процесі вимірювання. Компоновки з нерухомою деталлю є більш універсальними, точність переміщень менше залежить від маси та габаритів деталей, проте важче забезпечується точність переміщення вимірювальної головки.
Залежно від напрямку переміщення вузла вимірювальної головки розрізняють КВМ з вертикальною, горизонтальною компоновками, а також вимірювальні пристрої типу «рука». КВМ з вертикальною компоновкою мають високу жорсткість, точність, але доступ до горизонтальних отворів є ускладненим, вимірювальний простір обмежується стійками КВМ. Вертикальні компоновки розділяють на групи: портальні, мостові, консольні, стійкові.
Портальні компоновки є найбільш розповсюдженими. Характерною особливістю компоновок є П-подібний портал (рис.2.2а) [3]. Портальні компоновки мають високу жорсткість, точність, високі динамічні якості, зручність вимірювань.
Мостові компоновки використовується для великогабаритних КВМ (рис.2.2б) [4] і дозволяють отримати меншу, порівняно з іншими компоновками, масу рухомих вузлів у поєднанні з високою жорсткістю конструкції.
Консольні компоновки відзначаються наявністю рухомої горизонтальної консолі (рис.2.2в) [5]. Такі КВМ мають кращий, порівняно з портальними, доступ до поверхонь деталі, проте нижчу жорсткість і є чутливими до зміни маси рухомих вузлів.
Стійкові компоновки характеризується наявністю рухомої або нерухомої відносно основи стійки, по якій, як правило, у вертикальному напрямку переміщується піноль або супорт (рис.2.2г) [6]. Така компоновка використовуються для прецизійних малогабаритних КВМ, призначених для вимірювання високоточних деталей складної форми.
Стійкові компоновки з горизонтальною піноллю відзначаються наявністю горизонтальної пінолі, до якої кріпиться вимірювальна головка (рис.2.2д) [7]. Компоновка забезпечує відкритий простір для установлення та огляду деталі в процесі вимірювань. Проте КВМ даної компоновки дуже чутливі до маси деталей через велику деформацію пінолі.
Вимірювальні пристрої типу «рука» відзначаються компактністю, легкістю, мобільністю, проте мають суттєво нижчу жорсткість порівняно з іншими компоновками (рис.2.2е) [8].
Типи КВМ. Залежно від ступеню автоматизації процесу управління рухом робочих органів та обробки результатів вимірювань розрізняють КВМ ручні, напівавтоматичні та автоматичні. На ручних КВМ всі операції, пов’язані з вимірюванням деталі, виконуються оператором вручну. Машина оснащується по кожній координаті датчиками переміщень з блоками цифрового відліку положення виконавчих органів. Такі машини оснащують жорстким наконечником. Типовими операціями для таких КВМ є вимірювання міжцентрових відстаней; визначення відстані між площинами, визначення координат точок плавних криволінійних поверхонь та ін. У напівавтоматичних КВМ переміщення робочих органів здійснюється вручну а обробка результатів вимірювань – автоматично, нарешті в автоматичних КВМ обидва процеси є автоматизованими.
Пристрої взаємодії КВМ з вимірюваною поверхнею. Розрізняють жорсткі вимірювальні наконечники, вимірювальні головки, оптичні, лазерні та ін. пристрої.
Жорсткі вимірювальні наконечники застосовують лише в ручних КВМ. Наконечники складаються з хвостовика, контактного геометричного елемента (власне вимірювального наконечника) та стержня, який з’єднує наконечник з хвостовиком. Форма та розміри наконечника залежать від геометрії деталі, що вимірюється. Основні типи жорстких наконечників наведені на рис.2.3.
|
|
|
а) |
б) |
в) |
|
|
|
г) |
д) |
е) |






Рисунок 2.2 – Компоновки КВМ: а) портальна; б) мостова; в) консольна;
г) стійкова вертикальна; д) стійкова горизонтальна; е) вимірювальна «рука»
В ручних КВМ найбільш широко застосовують конічні, циліндричні (в тому числі з лискою) та сферичні наконечники, а у вимірювальних головках – сферичний наконечник, за допомогою якого визначають положення площин, форму контурів, діаметр і положення осей отворів, циліндрів, сфер.
Для забезпечення доступу наконечника до поверхні, що вимірюється, застосовують перехідники різної форми та розмірів, зокрема зігнуті стержні, подовжувальні проставки, проміжні муфти, які дозволяють встановити наконечники під заданим кутом, адаптери для одночасного установлення кількох наконечників, наконечники у вигляді «їжака» та ін.
Види наконечників |
Приклади використання |
Види наконечників |
Приклади використання |
Конічний |
|
Сферичний |
|
Обернений конічний |
|
Обернений призматичний |
|
Дисковий |
|
Кубічний |
|
Пальцевий |
|
Голчастий |
|
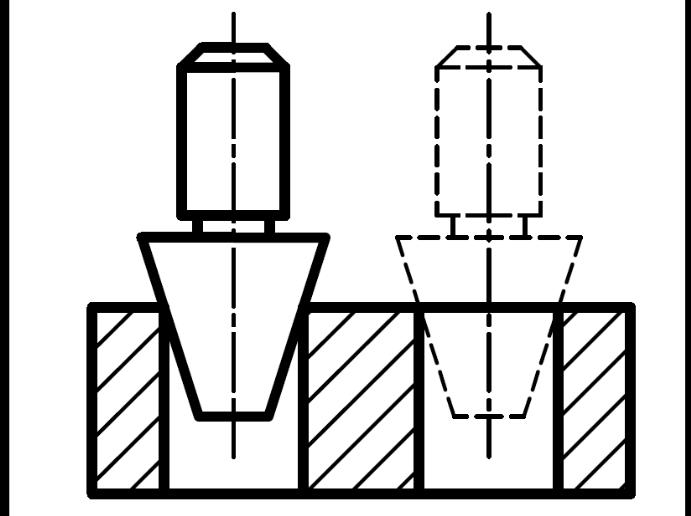
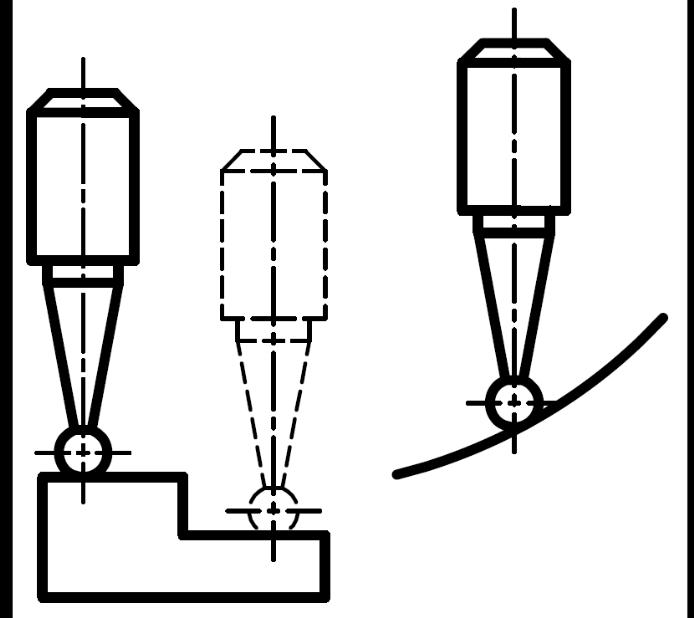
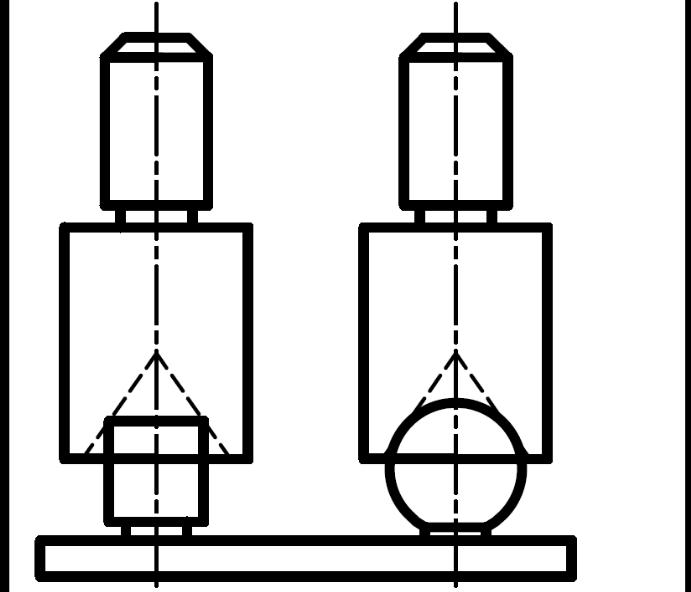
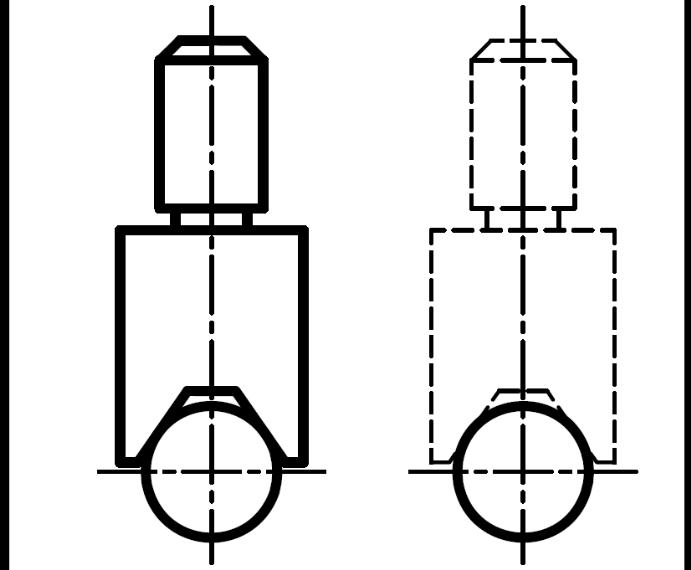
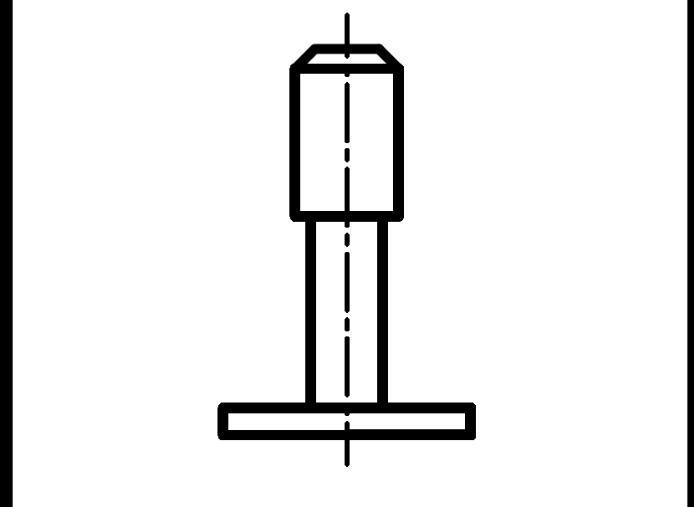
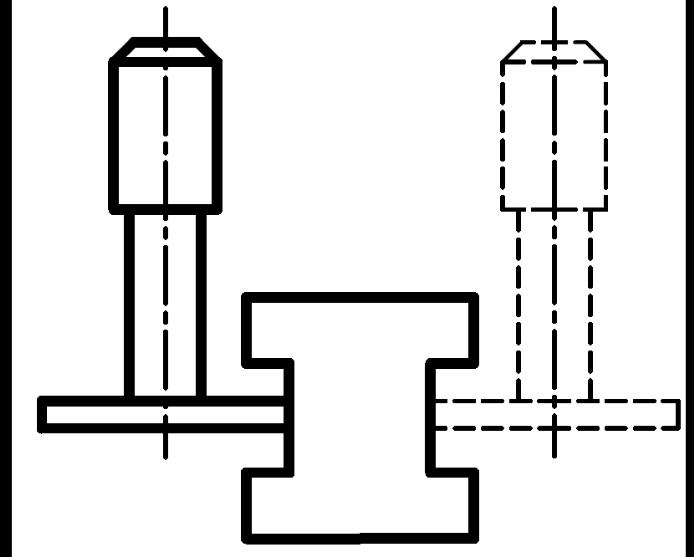
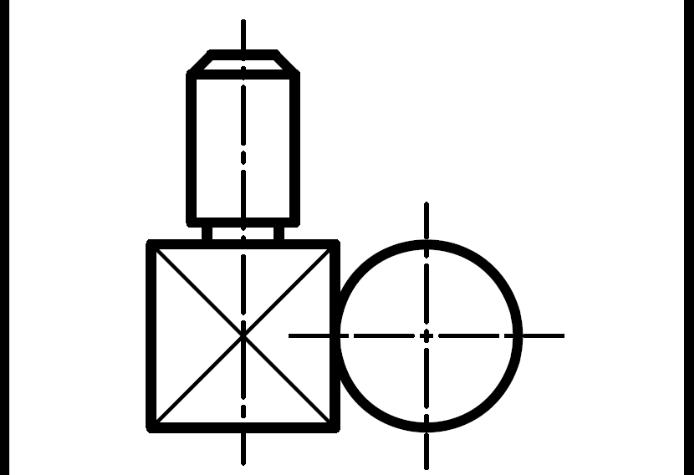
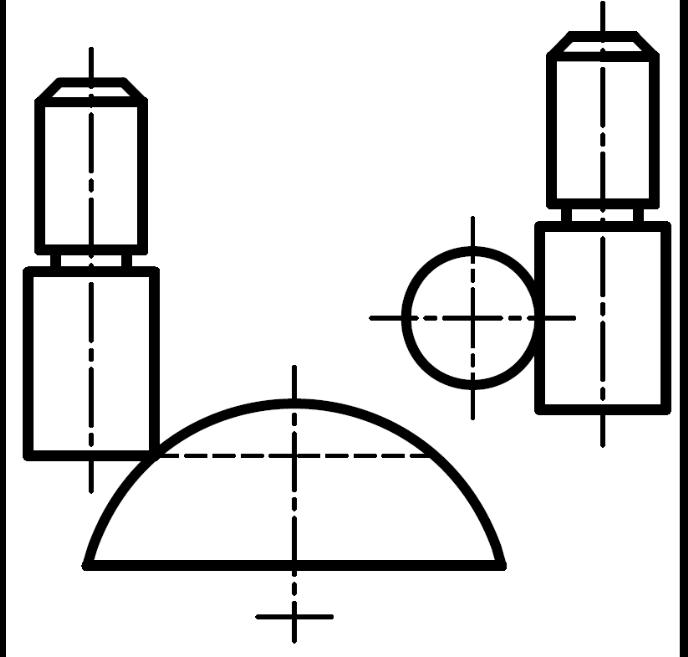
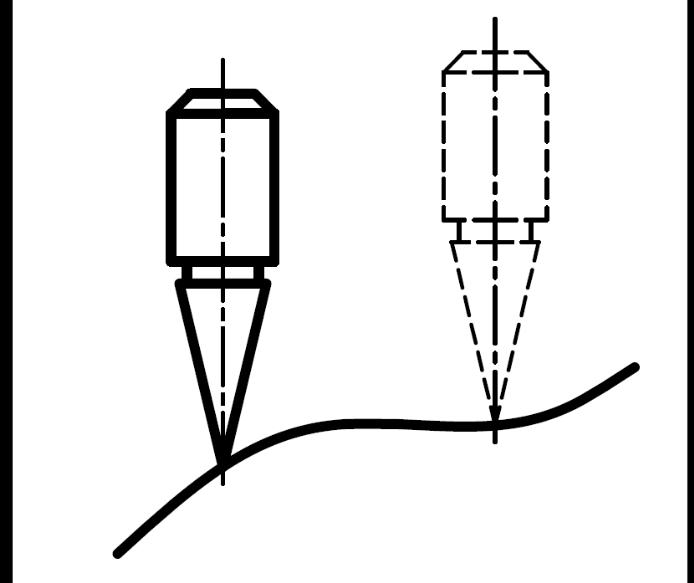
Рисунок 2.3 – Типи наконечників координатно-вимірювальних машин
Вимірювальні головки є основним інструментом взаємодії КВМ з деталлю. За принципом дії розрізняють нульові головки та головки відхилення. Нульові головки видають імпульсний пороговий сигнал під час дотику вимірювального наконечника до поверхні деталі. Головки відхилення видають сигнал, пропорційний до величини переміщення наконечника відносно нульової точки.
Залежно від виду взаємодії з поверхнею, що вимірюється, вимірювальні головки розділяють на контактні та безконтактні, механічні, електроконтактні, оптичні, пневматичні та ін. Крім того, розрізняють головки дво- та трикоординатні.