

Лабары / LR_5
.docxМіністерство освіти і науки України
Сумський державний університет
Кафедра комп'ютерних наук
Звіт
до лабораторної роботи №5
з дисципліни «Локальні системи автоматики»
на тему: «Визначення параметрів двигуна постійного струму»
Варіант 12
Виконав:
студент гр. СУ-61
Самара В.Р.
Перевірив:
к.т.н., доцент Толбатов В. А.
Суми 2020
Тема: Визначення параметрів двигуна постійного струму
Мета:
- створити в пакеті MatLab віртуальні моделі двигуна постійного струму;
- вивчити методики визначення параметрів двигуна (коефіцієнта передачі, електромагнітної і електромеханічної T постійних часу) на віртуальній моделі;
- по вивченим методикам визначити параметри двигуна на віртуальній моделі експериментальним шляхом.
Порядок виконання роботи
Параметри двигуна (Тм, Те, КФ) можуть бути визначені по заводському формуляру двигуна або зняті експериментально. Паспортні дані деяких типів двигунів за якими визначена кутова швидкість двигуна
 ,
,
де n, n΄ - номінальні і максимальні оберти двигуна, ω, ω΄ - кутова швидкість, відповідна номінальним і максимальних оборотів.
Величина КФ визначається з статистичного режиму за рівнянням

де UН, IН, RЯ – паспортні дані двигуна.
Електромеханічна ТМ і електромагнітна ТЯ - постійні часу - за визначаються формулами:

Слід враховувати, що Rя і Lя , що входять до вислів визначаються в замкнутому електричному ланцюзі, що складається з трансформатора, силових напівпровідникових приладів, підвідних шин і т.д. Тому паспортні дані, які враховують тільки параметри двигуна, повинні бути відкориговані з урахуванням параметрів ланцюга. Це ж зауваження стосується і до моменту інерції J, який повинен враховувати всі рухомі маси, наведені вала двигуна. Звідси випливає, що за паспортними даними Тэ і Тм можна визначити тільки приблизно, а для точного визначення існують експериментальні методи, засновані на аналізі осцилограм струму і швидкості.
Створивши віртуальну модель двигуна і віртуальний пристрій, що визначає постійні часу, можна на математичній моделі провести експерименти, що відповідають послідовності дій, які виконуються при визначенні постійних часу на двигуні постійного струму. Розглянемо застосування інтегрального методу для об'єкта, що описується функцією передачі другого порядку
![]()
де K, T1, Т2 – параметри об'єкта, які визначаються з аналізу перехідних процесів.
Коефіцієнт посилення К визначається в сталому режимі як відношення:
![]()
де ΔХВЫХ, ΔХвх – приріст вихідної напруги по вхідній.
Визначення електромагнітної постійної часу якірного ланцюга двигуна, описуваного рівнянням

де ТЭ – електромагнітна постійна часу якірного ланцюга двигуна.
Так як в рівнянні відсутня проти ЕРС, то Тэ визначається на загальмованому двигуні. Для цього слід відключити обмотку збудження і накласти гальмо на вал двигуна для виключення різкого зростання оборотів за рахунок збереження залишкового намагнічування, пов'язаного з гістерезисом.
При визначенні ТЭ слід враховувати дві обставини:
- двигун отримує від тиристорного перетворювача, який вносить запізнювання, не враховане в вираженні, що збільшує помилку при визначенні ТЭ;
- при зростанні струму якоря в початковий період спостерігається нестаціонарний режим (режим переривчастих струмів), який також вносить помилку в визначення ТЭ.
Застосуємо вищевикладені теоретичні положення для визначення параметрів передавальних функцій. Щоб методика визначення К, ТЭ наближалася до експерименту в виробничих умовах, задамо досліджувану ланка у вигляді підсистеми (чорного ящика), і будемо визначати параметри системи, обробляючи вихідні сигнали. (Рис.1)

Рисунок 1 - Схема пристрою для визначення параметрів ланок
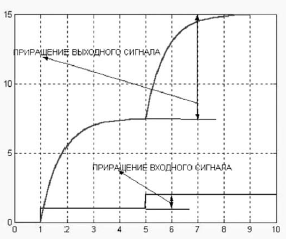
Рисунок 2 - Осцилограми сигналів на виході системи, за якими визначаються коефіцієнти посилення
Спочатку визначаємо коефіцієнт посилення. Для цього типу вхідного сигналу (Step) виводимо ланку на робочу точку, а потім в сталому режимі задаємо вхідний сигнал прирощення (Step1) і визначаємо коефіцієнт посилення як відношення приросту вихідного сигналу до вхідного. Обробка осцилограм (Рис.2) показує, що коефіцієнт посилення К=7.5. На Рис. 3 представлена віртуальна модель, що дозволяє при відомому коефіцієнті посилення визначити коефіцієнт диференціального управління при першій похідній. При цьому Subsystem маскує аперіодичну ланку першого порядку з коефіцієнтом посилення 7.5, а Subsystem1 маскує аперіодичну ланку другого порядку з коефіцієнтом посилення 1. За допомогою інтеграторів визначається площа, а блок Product здійснює ділення вихідного сигналу інтегратора на коефіцієнт посилення. На Рис.4 представлена віртуальна модель визначення постійних часу аперіодичної ланки, створена в пакеті SimPower Systems (SPS). У цій моделі елементи системи задані віртуальними блоками, які є аналогами фізичних елементів.

Рисунок 3 - Віртуальна модель пристрою, що визначає коефіцієнти при першій похідній

Рисунок 4 - Віртуальна модель пристрою для визначення параметрів системи в пакеті Sim Power Systems

Рисунок 5 - Визначення електромеханічної постійної часу Тм двигуна постійного струму
В Subsystem двигун заданий функцією передачі (Рис.6). На вхід двигуна подається постійна напруга 220 В, а коефіцієнт посилення блоку Gain 1 рівний коефіцієнту передачі двигуна і добуток вхідної напруги на коефіцієнт передачі двигуна визначає обороти в сталому режимі.

Рисунок 6 - Підсистема, задана функцією передачі.
В Subsystem1 (Рис.7) двигун заданий функцією передачі і вихід OUT1 визначає поточні обороти двигуна. На входи суматора подається стале значення оборотів і поточне значення оборотів. Інтеграл різниці визначаємо Тм.

Рисунок 7 - Підсистема, задана структурною схемою
Так як передавальна функція і структурна схема визначають один об'єкт, то обробка результатів експерименту дає практично однакові результати.
На Рис.8 представлена віртуальна модель визначення ТЭ і ТМ на обертовому двигуні, що складається з трьох підсистем.

Рисунок 8 - Віртуальна модель визначення ТЭ і ТМ на обертовому двигуні
Підсистема (Subsystem) маскує передавальну функцію двигуна і характеризується одним входом і чотирма виходами (Рис.9). На вхід (In1) подається напруга живлення, а вихід 1 (Out1) визначає напругу зворотного зв'язку по ЕРС, вихід 2 (Out2) – напруга зворотного зв'язку по струму, вихід 3 (Out3) – частоту обертання двигуна, вихід 4 (Out4) – струм двигуна.

Рисунок 9 - Підсистема, яка визначає передавальну функцію двигуна
Підсистема 1 (Subsystem1) маскує віртуальний пристрій, що визначає Тм інтегральним методом (Рис.10). Поточне значення оборотів подається по входу In1 з Subsystem (вихід Out3).

Рисунок 10 - Підсистема визначення Тм
Підсистема 2 (Subsystem2) маскує віртуальний пристрій, що визначає ТЭ на обертовому двигуні (Рис.11).
Структурна схема пристрою має логічний пристрій, який включає інтегратор.
При досягненні поточним струмом його початкового значення (Swith 1) і вимикає інтегратор, коли струм досяг кінцевого значення (Swith 2). Налаштування спрацьовування перемикачів визначається встановленим ними порогом. Для даного прикладу інтегратор включається при досягненні поточним струмом 10 А, а включається - при 40 А, що відображено в налаштуванні блоку Constant4: внесена число визначається різницею струмів (IH-Iк )=(10-40) = -30. Налаштування блоку Constant5 визначає опір якірного ланцюга, а вихід блоку Product (Рис.8).

Рис.11. Підсистема визначення Tэ на обертовому двигуні
Висновки: в даній лабораторній роботі створили в пакеті MatLab віртуальні моделі двигуна постійного струму; вивчили методики визначення параметрів двигуна (коефіцієнта передачі, електромагнітної і електромеханічної постійних часу) на віртуальній моделі; по вивченим методикам визначили параметри двигуна на віртуальній моделі експериментальним шляхом.
Відповіді на контрольні питання
-
Обґрунтуйте методику визначення коефіцієнта посилення.
Коефіцієнт посилення К визначається в сталому режимі як відношення:
![]()
де ΔХВЫХ, ΔХвх – приріст вихідної напруги по вхідній.
-
Обґрунтуйте методику визначення коефіцієнтів диференціальних рівнянь при першій похідній .

На рисунку представлена віртуальна модель, що дозволяє при відомому коефіцієнті посилення визначити коефіцієнт диференціального управління при першій похідній. При цьому Subsystem маскує аперіодичну ланку першого порядку з коефіцієнтом посилення 7.5, а Subsystem1 маскує аперіодичну ланку другого порядку з коефіцієнтом посилення 1. За допомогою інтеграторів визначається площа, а блок Product здійснює ділення вихідного сигналу інтегратора на коефіцієнт посилення.
3. Обґрунтуйте методику визначення електромагнітної постійної часу Tэ на необертальному двигуні.
У випадку коли двигун не обертається перехідні процеси в двигуні описуюються даним диференційним рівнянням

4. Обґрунтуйте методику визначення електромагнітної постійної часу Tэ на обертовому двигуні.
У випадку коли двигун обертається при визначенні Тэ слід враховувати дві обставини:
- двигун отримує від тиристорного перетворювача, який вносить запізнювання, не враховане в вираженні (10), що збільшує помилку при визначенні Тэ;
- при зростанні струму якоря в початковий період спостерігається нестаціонарний режим (режим переривчастих струмів), який також вносить помилку в визначення Тэ.
Для виключення цих складових помилок Тэ слід визначати на ділянці, що забезпечує стаціонарність процесу по вираженню.

5. Обґрунтуйте методику визначення передавальної функції двигуна постійного струму по його паспортним даним.




Підрахувавши дані коефіцієтти і підставивши в рівність нижче отримаємо передатну функцію двигуна постійного струму.

6. Обґрунтуйте методику визначення структурної схеми двигуна постійного струму по його паспортним даним.





Визначивши ці параметри відносно варіанту заносимо значення в Матлаб.
7. Запишіть рівняння якірного ланцюга для обертового і нерухомого двигуна постійного струму по його паспортним даним.
8. Чому запізнювання, що вноситься тиристорним перетворювачем, вносить похибку при визначенні електромагнітної постійної часу Tэ?
Якщо тиристорний перетворювач запізнюється має більший час перехідного процесу, то відповідно струм і обмотках двигуна також буде запізнюватися, що скажеться на електромагнітній постійній часу Tэ.