

Лабары / LR_4
.docxМіністерство освіти і науки України
Сумський державний університет
Кафедра комп'ютерних наук
Звіт
до лабораторної роботи №4
з дисципліни «Локальні системи автоматики»
на тему: «Дослідження слідкуючих систем в режимі малих переміщень»
Варіант 12
Виконав:
студент гр. СУ-61
Самара В.Р.
Перевірив:
к.т.н., доцент Толбатов В.А.
Суми 2020
Тема:
Дослідження слідкуючих систем в режимах малих переміщень
Мета:
- Розрахунок параметрів аналітичним шляхом для стежать приводів, що працюють в режимі малих переміщень;
- Експериментальна перевірка на математичній моделі результатів аналітичного розрахунку;
- Встановлення зв'язків між параметрами регуляторів і основними показниками якості перехідних процесів.
Порядок виконання роботи
Контроль стану знаходить найширше застосування: в системах управління промисловими роботами, верстатами з ЧПУ, в системах наведення антен, оптичних телескопів і т.д. При цьому внутрішні контури струмів і швидкості виконуються за розглянутими раніше типовими схемами підлеглого регулювання, а до них додається цифровий або аналоговий контур положення, контроль вхідної величини в якому здійснюється за допомогою різного типу датчиків.
Системи управління становищем прийнято розділяти на працюючі в режимі позиціонування і слідкуванні. Позиціонуванням називається такий режим роботи управління становищем, при якому завданням управління є переміщення електроприводом механізму (робочого органу) з одного положення в інше при необхідному швидкодії.
У режимі позиціонування розрізняють:
- Режим малих переміщень, при якому жоден з регуляторів не обмежений, і система працює як лінійна;
- Режим середніх переміщень, при якому обмежений якірний струм, тобто обмежений вихідний сигнал регулятора швидкості;
- Режим великих переміщень, при обробці яких, двигун протягом деякого часу працює на сталій швидкості, тобто всі регулятори деякий час знаходяться в зоні
обмеження.

Рисунок 1 - Структурна схема трьохконтурної системи регулювання з оптимізованим контуром струму без ОС по ЕРС
Використовуючи структурну схему Рис.1, здійснимо налаштування контуру швидкості на технічний оптимум (додаток А).

Рисунок 2 - Структурна схема трьохконтурної системи регулювання з оптимізованим контуром швидкості без ОС по ЕРС
Здійснимо налаштування контура переміщення на технічний оптимум і визначимо параметри регулятора положення. При пропорційному регуляторі швидкості точна обробка
задає сигналу буде здійснюватися тільки при відсутності навантаження. Для точної відпрацювання вхідного сигналу при наявності навантаження слід застосувати пропорційно-інтегральний регулятор швидкості, тобто налаштувати контур швидкості на симетричний оптимум. (Додаток А)

Рисунок 3 - Двоконтурна система регулювання з П-регулятором швидкості
Дослідження цієї системи Рис.3 показали (Рис.4.а), що перерегулювання по управлінню становить 8%, а при зміні статичного навантаження на виході системи з'являється статична помилка Δω. На Рис.4.б приведена осцилограма струму, а на Рис.4.в -осцилограма напруги. Так як в системі відсутні блоки, що обмежують вихідні сигнали, то струм і напруга досягають значень, які у багато разів перевищують допустимі. Тому цю модель можна використовувати тільки при малих величинах задающого сигналу, не виводячи вихідні координати блоків в зони насичення. При великих сигналах модель не відображає реальних процесів в системі.
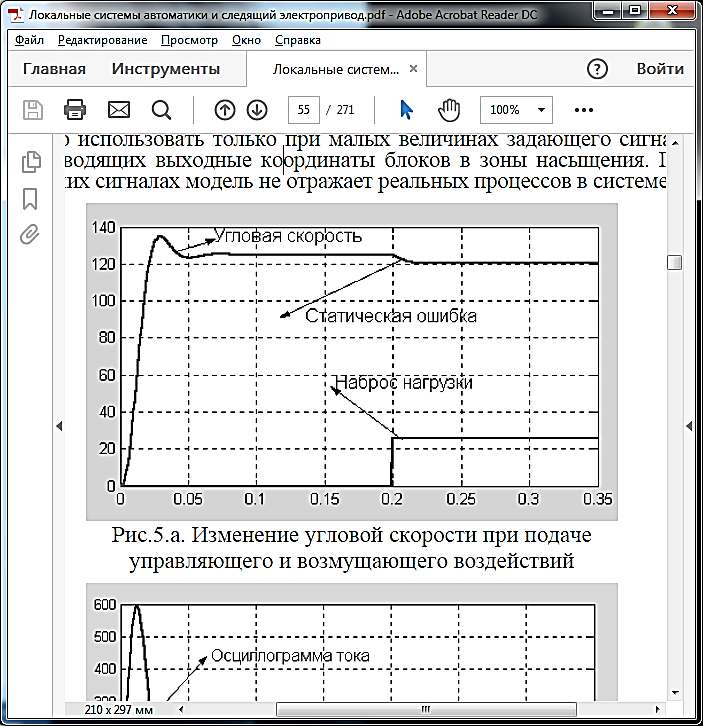
Рисунок 4.а - Зміна кутової швидкості при подачі керуючого і обурюючого впливів
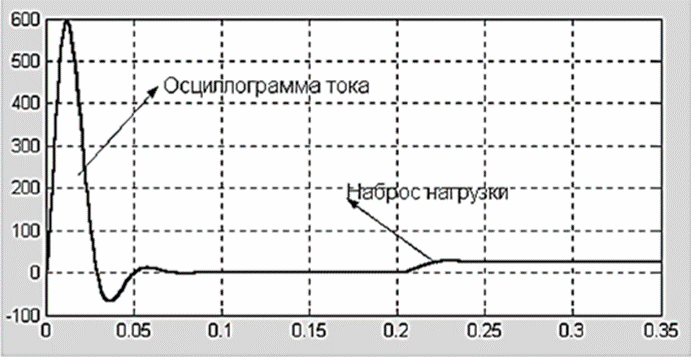
Рисунок 4.б - Зміна струму при подачі керуючого і обурюючих впливів

Рисунок 4.в - Зміна напруги при подачі керуючого і обурює впливів
На Рис.5 представлена та ж система регулювання, але в контурі швидкості застосований ПІ-регулятор.
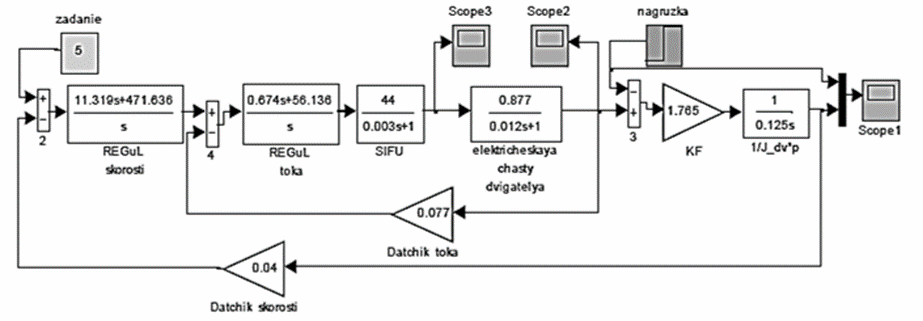
Рисунок 5 - Двоконтурна система регулювання з ПІ-регулятором швидкості
Як і слід було очікувати, перерегулювання зросло до 53,5%. Астатична помилка за збуренням дорівнює нулю (Рис.6.а). Система з ПІ-регулятором швидкості розглядається як лінійна: в ній не враховано ефект насичення.
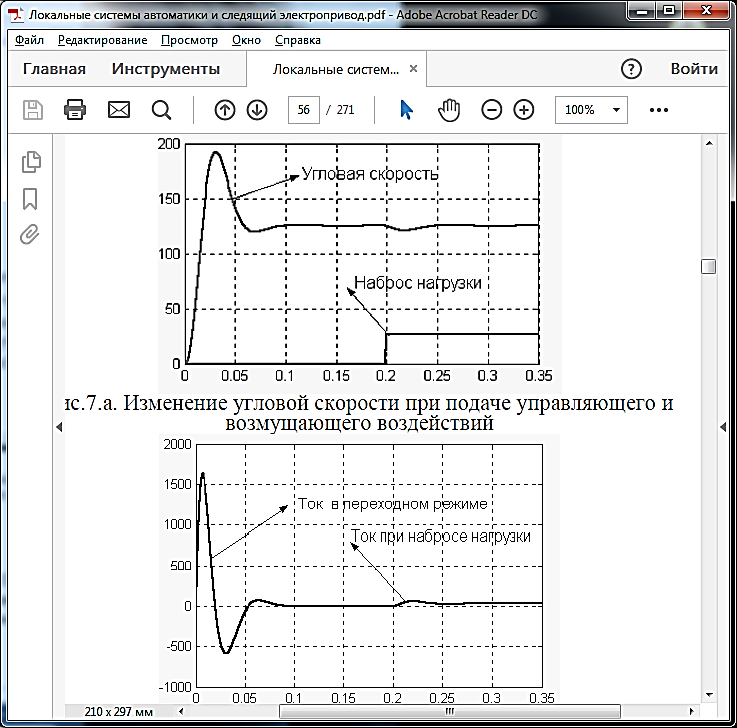
Рисунок 6.а - Зміна кутової швидкості при подачі керуючого і обурюючого впливів

Рисунок 6.б - Зміна струму при подачі керуючого і обурюючих впливів

Рисунок 6.в - Зміна напруги при подачі керуючого і обурюючих впливів
Для зменшення перерегулювання на вході регулятора швидкості ставиться фільтр (аперіодична ланка) з постійною часу 4TμC (Рис.7).

Рисунок 7 - Структурна схема двоконтурної системи з фільтром в каналі задання
Перехідні характеристики по управлінню і обуренню двоконтурної системи з ПІ-регулятором швидкості і фільтром в каналі завдання швидкості представлені на Рис.8.

Рисунок 8.а - Зміна кутової швидкості при подачі керуючого і обурюючого впливів з фільтром в каналі задання швидкості

Рисунок 8.б - Зміна струму двигуна при подачі керуючого і обурюючих впливів з фільтром в каналі завдання швидкості

Рисунок 8. в - Зміна напруги перетворювача при подачі керуючого і обурюючого впливів з фільтром в каналі задання швидкості
З Рис.8.а слідує, що система зберегла астатизм по обуренню, а тривалість перехідного процесу по управлінню збільшилася при одночасному зменшенні перерегулювання.
Висновок: під час лабораторної роботи було проведено розрахунок параметрів аналітичним шляхом для слідкуючих приводів, що працюють в режимі малих переміщень; експериментальна перевірка на математичній моделі результатів аналітичного розрахунку; встановлення зв'язків між параметрами регуляторів і основними показниками якості перехідних процесів.
ДОДАТОК А
Рн=110000 Вт; nн=500 об/мин;Rя=К1*0,0805 Ом=0,12 Ом; J=16,25 кг*м2;
Lа=К2*4,2*10-3 Гн; Iн=550 А; Uн=220 В
λ=Imax/Iн – перегрузочная способность двигателя (λ=2,5)
Приймаємо, що двигун отримує живлення від трифазного тиристорного перетворювача, зібраного за схемою Ларіонова, тоді некомпенсована постійна часу буде визначатися за формулою:

Де f = 50 Гц - частота мережі живлення; m = 6 - число імпульсів за період.
При переході від тиристорної схеми до транзисторної - затримка (Tμ) може бути зменшено.
Лінійна ділянка підсилювача ± 10 В; робоча точка підсилювача ± 5 В; К1, К2 - коефіцієнти, що враховують параметри ланцюгів живлення; К3 - коефіцієнт, що враховує момент інерції рухомих мас механізму.
Приймаємо: К1 = 1,5, К2 = 1,2, К3 = 1,25.
За паспортними даними двигуна визначаємо параметри, які використовуються при розрахунку систем регулювання.
TЕ визначаємо з урахуванням трансформатора, випрямляча і опору підвідних проводів:



Тμ визначаємо з урахуванням рухомих мас механізму:

Коефіцієнт посилення перетворювача визначається з умови:

Коефіцієнт посилення датчика струму КДТ визначається виразом:

Коефіцієнт посилення датчика швидкості:

Внутрішній контур струму налаштовується на технічний оптимум:

Визначаємо параметри регулятора швидкості, налаштовують систему на технічний оптимум:

Відповіді на контрольні питання
1. Чим характеризуються різні режими систем регулювання становищем?
Системи управління положенням прийнято розділяти на що працюють в режимі позиціонування і стеження. Позиціонуванням називається такий режим роботи управління положенням, при якому завданням управління є переміщення електроприводом механізму (робочого органу) з одного положення в нше при необхідній швидкодії.
У режимі позиціонування розрізняють:
- Режим малих переміщень, при якому жоден з регуляторів не обмежений і система працює як лінійна;
- Режим середніх переміщень, при якому обмежений якірний струм, тобто обмежений вихідний сигнал регулятора швидкості;
- Режим великих переміщень, при обробці яких, двигун протягом деякого часу працює на сталій швидкості, тобто всі регулятори деякий час знаходяться в зоні обмеження.
2. Як визначити малі некомпенсуючі постійні часу контуру струму?
Внутрішній контур струму налаштовується на технічний оптимум з малої некомпенсованої постійної часу TμT = Tμ + 0.5 TДT. Якщо не враховувати інерційність датчика струму, то некомпенсована постійна часу внутрішнього контуру в першому наближенні визначається інерційністю вентильного перетворювача.
3. Як визначити параметри регулятора контуру струму, якщо він налаштований на технічний оптимум?
Передатна функція контура струму, налаштованого на технічний оптимум, має вигляд:
![]()
4. Як визначаються малі некомпенсовані постійні часу контуру швидкості?
Мала некомпенсована постійна часу в загальному випадку визначається виразом: TμT = Tμ + 0.5 TДT
Некомпенсовані постійну часу контуру швидкості, так само як і контуру струму, визначаються без урахування інерційності зворотнього зв'язку (TДС = 0). Отже, Tμс =2TμT = 2Tμ
5. Як визначаються параметри регулятора контуру швидкості, якщо він налаштований на технічний оптимум?
Передатна функція регулятора швидкості:
![]()
Налаштувавши контур швидкості на технічний оптимум, отримаємо передавальну функцію замкнутого контуру швидкості:
![]()
6. Як визначаються параметри регулятора контуру швидкості, якщо він налаштований на симетричний оптимум?
Передатна функцію регулятора швидкості, налаштованого на симетричний оптимум:
![]()
7. Як визначаються параметри регулятора положення?
Налаштування контура положення на технічний оптимум і визначення параметрів регулятора положення:

При пропорційному регуляторі швидкості точна обробка задає сигналу буде здійснюватися тільки при відсутності навантаження. Для точної відпрацювання вхідного сигналу при наявності навантаження слід застосувати пропорційно-інтегральний регулятор швидкості, тобто налаштувати контур швидкості на симетричний оптимум.
8. Як зменшити перерегулювання виходу системи, якщо контур швидкості налаштований на симетричний оптимум?
Для зменшення перерегулювання на вході регулятора швидкості ставиться фільтр (апериодическое ланка) з постійною часу 4TμC
9. Як визначити параметри фільтра, що стоїть в прямому ланцюзі контуру регулювання?
Передатна функція фільтра:
![]()
Передатна функція замкнутого оптимізованого контура швидкості з пропорційно-інтегральним регулятором і при наявності фільтра має вигляд:
![]()
10. Як зміняться характеристики трьохконтурної системи регулювання після настройки контуру швидкості на симетричний оптимум?
11. Із яких міркувань визначається коефіцієнт передачі датчика струму?

 ,
,
 ,
,
 ,
,

12. Із яких міркувань визначається коефіцієнт передачі датчика швидкості?

 ,
,
 ,
,
 ,
,
 ,
,
13. Як визначаються параметри (постійні часу і коефіцієнти передачі) передавальних функцій, що визначають динамічні властивості двигуна постійного струму?
TµT = Tµ ток
TµС = 2TµТ + 0,5* TДС скорочть
TµП = 2TµС = 0,5*TДП положение
14. Обґрунтуйте області застосування трьохконтурної системи, налаштованої на технічний і симетричний оптимум.
Використовуються для керування станками з ЧПУ.
А саме двигунами які для них використовуються