

1.5.3 Примеры частных видов функций Ляпунова
1.
Пусть
дана
![]()
![]()
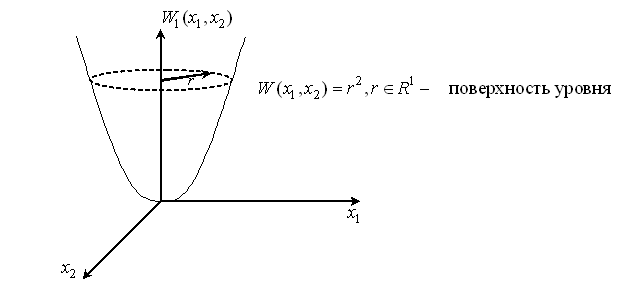
Рисунок 3

![]() .
.
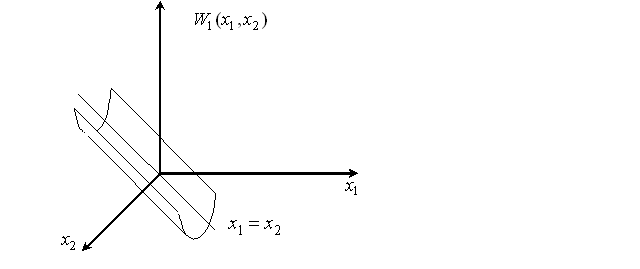
Рисунок 4


![]()
Рисунок 5
Утверждение. Отметим, что в примерах (1)÷(3) построенные функции Ляпунова определялись следующими матрицами:
1.
2.
3. ■
■
![]()
![]()
![]()
5.
![]()
Допускает
БМВП при
![]() (знакопостоянная положительная).
(знакопостоянная положительная).
6.
![]()
Ограничена,
знакопостоянная положительная;
![]() но
не равномерно по t,
следовательно, не допускает БМВП при
но
не равномерно по t,
следовательно, не допускает БМВП при
![]()
7.
![]() Положительно определенная; не допускает
БМВП при
Положительно определенная; не допускает
БМВП при
8.
![]() .
Положительно определенная внутри шара
единичного радиуса,
.
Положительно определенная внутри шара
единичного радиуса,
![]() допускает БМВП при
допускает БМВП при
1.6 Полная производная по времени t функции Ляпунова, вычисленная в силу системы
Пусть дана нелинейная нестационарная система дифференциальных уравнений вида:
![]() (1.6.1)
(1.6.1)
с областью определения
![]() (1.6.2)
(1.6.2)
П ричем
в этой области функция
ричем
в этой области функция
![]() :
:
(а) ) непрерывна по t, x;
(б) имеет
непрерывные частные производные вида
![]()
![]()
![]() , (1.1.4)
ограниченные равномерно по
, (1.1.4)
ограниченные равномерно по
![]() на любом компактном подмно-
на любом компактном подмно-
жестве
из области
![]() (или говорят кратко, непрерывно
(или говорят кратко, непрерывно
дифференцируемы
по
![]() );
);
в)
![]() ,
т.е. система допускает тривиальное
решение
,
т.е. система допускает тривиальное
решение
![]()
Условия (1.6.3) означают, что область (1.6.2) есть область единственности для системы (1.6.1).
Пусть
также дана функция Ляпунова вида
,
определенная в некоторой области
![]() ,
,![]() и пусть функция Ляпунова вида
– непрерывно дифференцируема по t,
x
в
,
т.е. усиливаем свойства ее непрерывности,
задаваемыми введенным выше определением
функции Ляпунова.
и пусть функция Ляпунова вида
– непрерывно дифференцируема по t,
x
в
,
т.е. усиливаем свойства ее непрерывности,
задаваемыми введенным выше определением
функции Ляпунова.
Вычислим полную производную по времени как сложную функцию аргументов t, x. Введем обозначения
![]()
![]()
Тогда

Подставляя
в последнее выражение для
![]() в силу системы (1.6.1), получим:
в силу системы (1.6.1), получим:
 (1.6.4)
(1.6.4)
Здесь введена вектор-функция – градиент скалярной-функции по вектору x вида:
 (1.6.5)
(1.6.5)
Определение. Выражение (1.6.4) называется полной производной по времени t функции Ляпунова , вычисленной в силу приведенной системы (1.6.1).■
Замечание
1.
Если
![]() есть
произвольное решение системы (1.6.1), то
есть
произвольное решение системы (1.6.1), то
![]() ,
в силу выражения (1.6.4), представляет
собой полную производную по времени t
сложной функции
,
в силу выражения (1.6.4), представляет
собой полную производную по времени t
сложной функции
![]() ,
т.е.
,
т.е.
![]() .■ (1.6.6)
.■ (1.6.6)
Замечание
2.
Заметим, что если функции Ляпунова
из формулы полной производной (1.6.4) не
придать дополнительные свойства
непрерывной дифференцируемости по t
и x
, то из формулы (1.6.6) могут не следовать
формулы (1.6.4), (1.6.5), так как для
![]() )
не будет удовлетворяться требование
непрерывности по t
, x
к
ней
как к функции Ляпунова. ■
)
не будет удовлетворяться требование
непрерывности по t
, x
к
ней
как к функции Ляпунова. ■
1.7 Геометрический смысл полной производной по времени функции Ляпунова, вычисленной в силу приведенной системы
Пусть
(для определенности) дана положительно
определенная функция Ляпунова
![]() .
Знание ее производной в силу системы
(1.6.1) позволяет наглядно выяснить характер
движения изображающей точки вдоль
интегральной кривой (решения) системы.
.
Знание ее производной в силу системы
(1.6.1) позволяет наглядно выяснить характер
движения изображающей точки вдоль
интегральной кривой (решения) системы.
Действительно,
пусть в некоторый фиксированный момент
времени
![]() изображающая точка М
занимает
некоторое положение на кривой решение
изображающая точка М
занимает
некоторое положение на кривой решение
![]() системы (1.6.1). Построим поверхность
системы (1.6.1). Построим поверхность
![]() (с
– положительное число), проходящее
через точку М.
Затем по формуле (1.6.4) вычислим полную
производную
(с
– положительное число), проходящее
через точку М.
Затем по формуле (1.6.4) вычислим полную
производную
![]() функции V
в этой точке. Так как
функции V
в этой точке. Так как
![]() , и
, и
![]() будет
равна скалярному произведению
вектор-функций
будет
равна скалярному произведению
вектор-функций
![]()
![]() (1.7.1)
(1.7.1)
причем напомним, что вектор-функция f определяет вектор скорости движения изображающей точки вдоль решения системы. Рассмотрим три возможных случая. Рассмотрим рисунок 6.
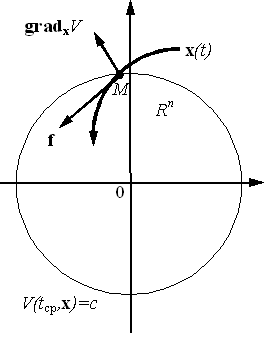
Рисунок 6,а
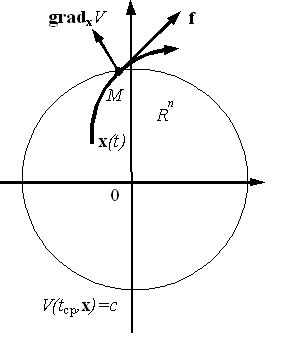
Рисунок 6,б
1. Пусть в данном положении точки М производная отрицательна
![]()
т.е. функция V убывает на решении системы (см. рисунок 6,а).
Известно,
что вектор
![]() направлен
по нормали к поверхности
в
точке М
в сторону возрастания функции V,
т.е.во
внешнюю часть поверхности V=с,
если функция Ляпунова V
положительно определенная (и внутрь
поверхности
направлен
по нормали к поверхности
в
точке М
в сторону возрастания функции V,
т.е.во
внешнюю часть поверхности V=с,
если функция Ляпунова V
положительно определенная (и внутрь
поверхности
![]() ,
если V
отрицательно определенная), а вектор-функция
f
скорости
движения точки М
касателен к поверхности в точке М.
,
если V
отрицательно определенная), а вектор-функция
f
скорости
движения точки М
касателен к поверхности в точке М.
Таким образом, отрицательность - скалярного произведения (1.7.1) векторов означает, что угол между ними тупой, и так как вектор направлен по внешней нормами к поверхности в точке М , то вектор скорости f точки М направлен внутрь этой поверхности. А это означает, что траектория изображающей точки М (интегральная кривая, решение системы) пересекает поверхность снаружи вовнутрь (см. рисунок 6,а).
2.
Пусть в данном положении точки М
![]() ,
т.е. функция V возрастает
на решении системы (см. рисунок 6,б).
Отрицательность
- скалярного произведения (1.7.1) векторов
означает,
что угол между ними острый, и, следовательно,
траектория
изображающей точки
М
пересекает поверхность
изнутри наружу (см.
рисунок 6,б).
,
т.е. функция V возрастает
на решении системы (см. рисунок 6,б).
Отрицательность
- скалярного произведения (1.7.1) векторов
означает,
что угол между ними острый, и, следовательно,
траектория
изображающей точки
М
пересекает поверхность
изнутри наружу (см.
рисунок 6,б).
3.
Пусть в данном положении точки М
производная
![]() ,
т.е. скалярное произведение векторов
равно нулю, угол между этими векторами
- прямой, и следовательно, траектория
изображающей точки
М
касается поверхности
(в частности, она может целиком лежать
на этой поверхности).
,
т.е. скалярное произведение векторов
равно нулю, угол между этими векторами
- прямой, и следовательно, траектория
изображающей точки
М
касается поверхности
(в частности, она может целиком лежать
на этой поверхности).
Замечание.
Главный идейный смысл второго, или, как
его еще называют, прямого метода Ляпунова,
состоит в том, что свойства устойчивости
тривиального решения приведенной по
Ляпунову системы, или, что то же, системы
возмущенного движения, изучаются по
поведению полной производной по времени
функции Ляпунова, вычисленной в силу
системы (говорят, вдоль решений системы
уравнений возмущенного движения), причем
сами решения остаются неизвестными, а
их производные заменяются известными
правыми частями
![]() ,
т.е. второй метод Ляпунова является
косвенным
методом
исследования свойств устойчивости
решений приведенной системы. ■
,
т.е. второй метод Ляпунова является
косвенным
методом
исследования свойств устойчивости
решений приведенной системы. ■