

Структурная модель автономного инвертора
Для имитации процессов в преобразователе частоты использована матричная модель автономного инвертора, приведенная в [28]. Схема этой модели приведена на рис. 9.8 – 9.11. Здесь неуправляемый выпрямитель считается идеальным и представлен внешним сигналом Ud.

Рис. 9.8. Внутреннее представление функционального блока AIN_DQ
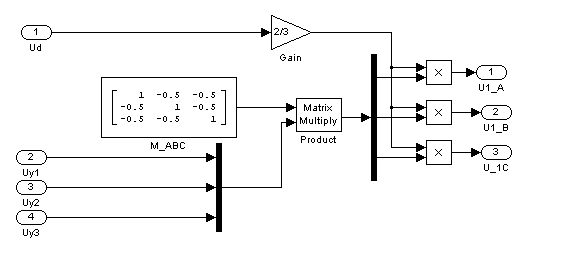
Рис. 9.9. Внутреннее представление функционального блока AIN_abc
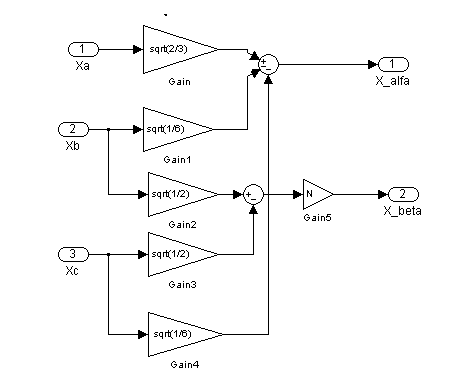
Рис. 9.10. Внутреннее представление функционального блока Preobr_3v2
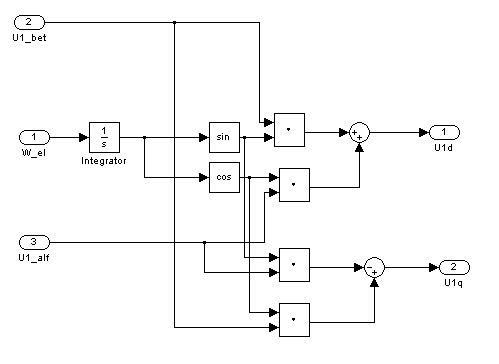
Рис. 9.11. Внутреннее представление функционального блока DQ_ Preobr1
Структурная модель блока компенсации перекрестных связей
Блок компенсации перекрестных связей формирует сигналы, компенсирующие влияние перекрестных связей, двух последних составляющих в уравнениях (8.1, 8.2), на процессы в контурах регулирования составляющих вектора тока статора, в соответствии с выражениями [19]
 (9.3)
(9.3)
где — коэффициент передачи преобразователя частоты (ПЧ) по амплитуде напряжения.
Полученные напряжения последовательно преобразуются с помощью функциональных блоков DQ_ Alf, Preobr_2v в фазные напряжения статора U1a U1b, U1c, которые подаются на вход формирователя напряжений управления инвертора RT. Структурное представление блока компенсации приведено на рис. 9.12 – 9.15.
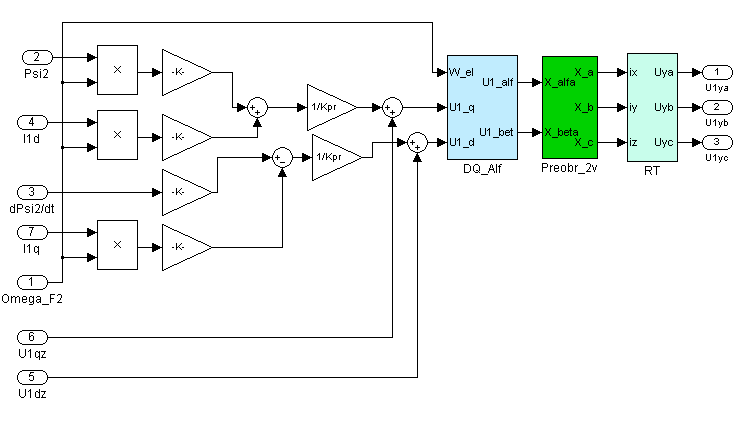
Рис. 9.12. Внутреннее представление функционального блока RZ_PRS

Рис. 9.13. Внутреннее представление функционального блока DQ_alf
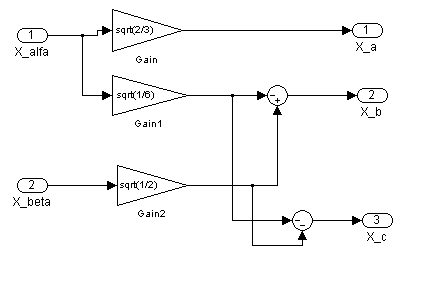
Рис. 9.14. Внутреннее представление функционального блока Preobr 2v
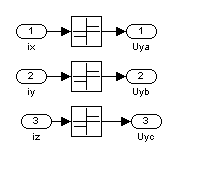
Рис. 9.15. Внутреннее представление функционального блока RT
Структурная модель ПИ-регулятора тока
Для
имитации процессов в ПИ-регуляторах
активной
( )
и реактивной (
)
и реактивной ( )
составляющих тока статора использована
модель, приведенная в [27]. Схема этой
модели приведена на рис. 9.16.
)
составляющих тока статора использована
модель, приведенная в [27]. Схема этой
модели приведена на рис. 9.16.
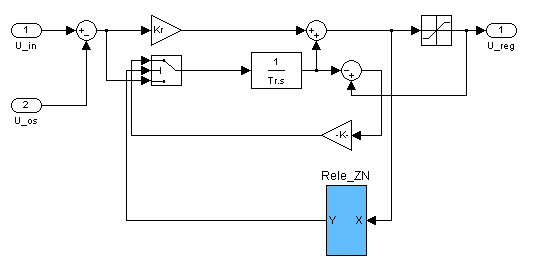
Рис. 9.16. Внутреннее представление функционального блока PI_Ctrl
Структурная модель ПИ-регулятора скорости
Для имитации процессов в ПИ-регуляторе скорости использована модель, приведенная на рис. 9.17.

Рис. 9.17. Внутреннее представление функционального блока Reg_Speed1
Структурная модель ПИ-регулятора ЕДС
Для имитации процессов в ПИ-регуляторе ЕДС использована модель, приведенная на рис. 9.18
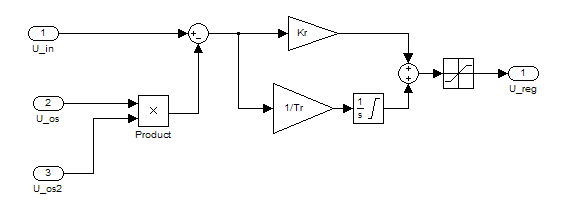
Рис. 9.17. Внутреннее представление функционального блока PI_Ctrl_EDS
АНАЛИЗ ДИНАМИЧЕСКОГО ПОВЕДЕНИЯ ЭЛЕКТРОПРИВОДА
Для анализа динамического поведения электропривода в среде MatLab 7.1 / Simulink построена структурная модель функционального уровня. Схема этой модели приведена на рис. 10.1.
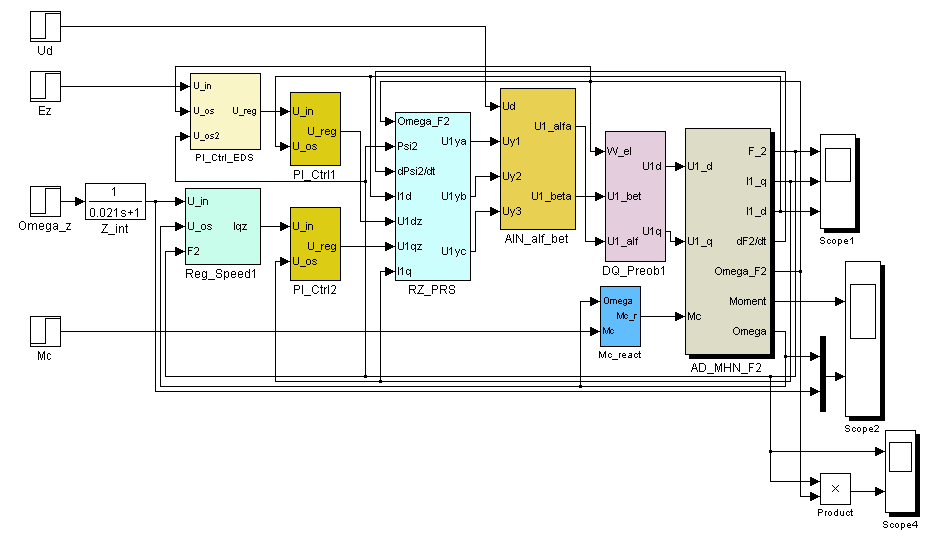
Рис. 10.1. Структурная модель электропривода
В результате вычислительных экспериментов получены динамические характеристики электропривода в следующих режимах:
Пуск электропривода на номинальную скорость при Mc=0.1 Mн и наброс момента статического сопротивления до Mн и останов
Wz = 101.26 1/с; Mc1=5.43 Нм; Mc2=54.3135 Нм (рис. 10.2);
Пуск электропривода на повышенную скорость при Mc=0.1 Mн и наброс момента статического сопротивления до Mн
Wz = 150 1/с; Mc1=5.43 Нм; Mc2=54.3135 Нм (рис. 10.3);
Пуск электропривода на на основную скорость (I зона) и выход через 1.5 с на повышенную скорость
Wz1 = 100 1/с; Wz2 = 180 1/с;Mc=50 Нм (рис. 10.4);
Пуск электропривода на повышенную скорость и реверс в I зону
Wz1 = 150 1/с; Wz2 = -50 1/с;Mc=50 Нм (рис. 10.5);
На основании полученных графиков переходных процессов можно сделать вывод, что выбранный комплектный электропривод с рассчитанными параметрами регуляторов удовлетворяет статическим и динамическим показателям, представленным в техническом задании на проектирование.
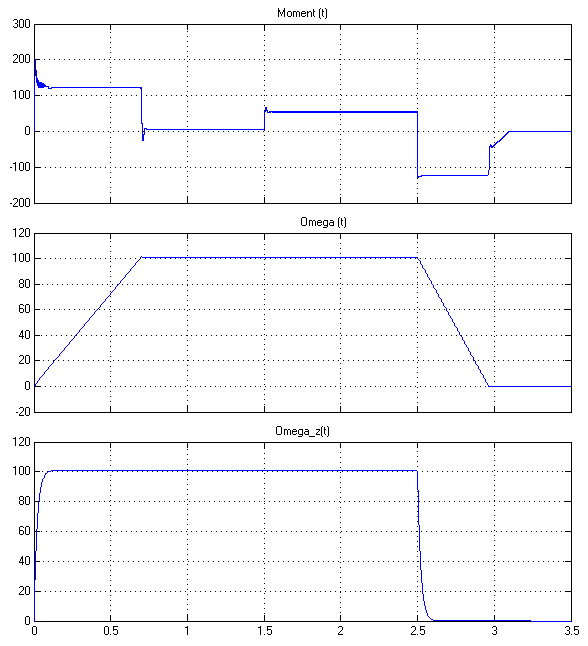
Рис.
10.2, а. Динамические характеристики
 при пуске электропривода на Wн
при
МС=
0.1Мн,
набросе
нагрузки до Мн
и
останове
при пуске электропривода на Wн
при
МС=
0.1Мн,
набросе
нагрузки до Мн
и
останове
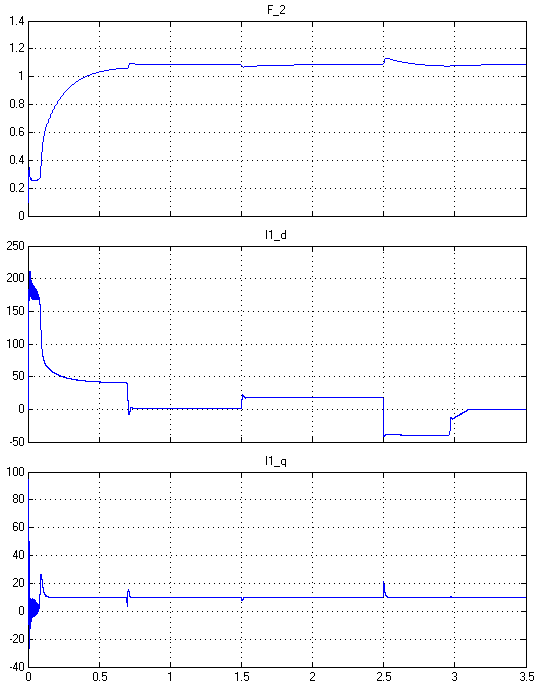
Рис.
10.2,б Динамические характеристики
 при пуске электропривода на Wн
при
МС=
0.1Мн,
набросе
нагрузки до Мн
и
останове
при пуске электропривода на Wн
при
МС=
0.1Мн,
набросе
нагрузки до Мн
и
останове
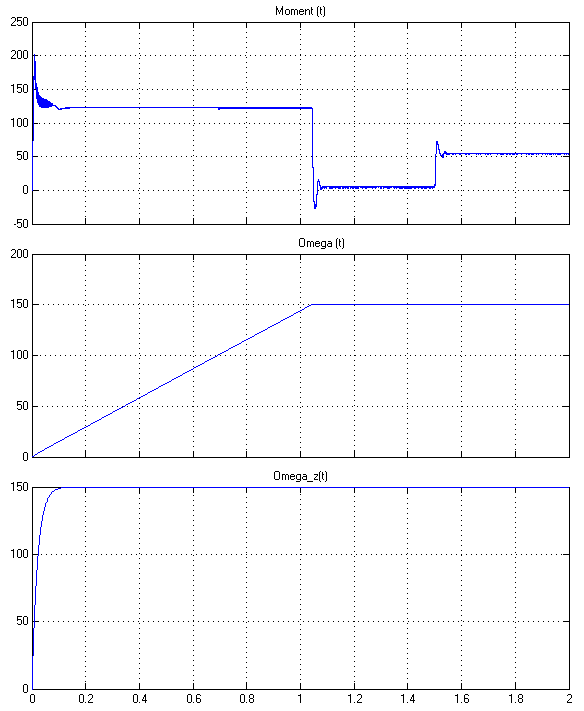
Рис. 10.3, а. Динамические характеристики при пуске электропривода на повышенную скорость (W=150 1/с, II зона) при МС= 0.1Мн и набросе нагрузки до Мн
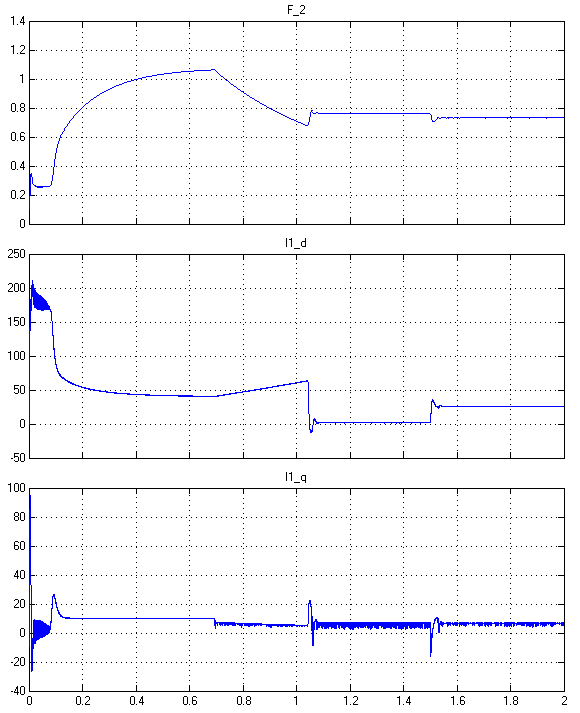
Рис. 10.3,б Динамические характеристики при пуске электропривода на повышенную скорость (W=150 1/с, II зона) при МС= 0.1Мн и набросе нагрузки до Мн

Рис. 10.4, а. Динамические характеристики при пуске электропривода на основную скорость (W=100 1/с, I зона) и выход через 1.5 на повышенную скорость (W=180 1/с, II зона) при МС= 50 Нм и
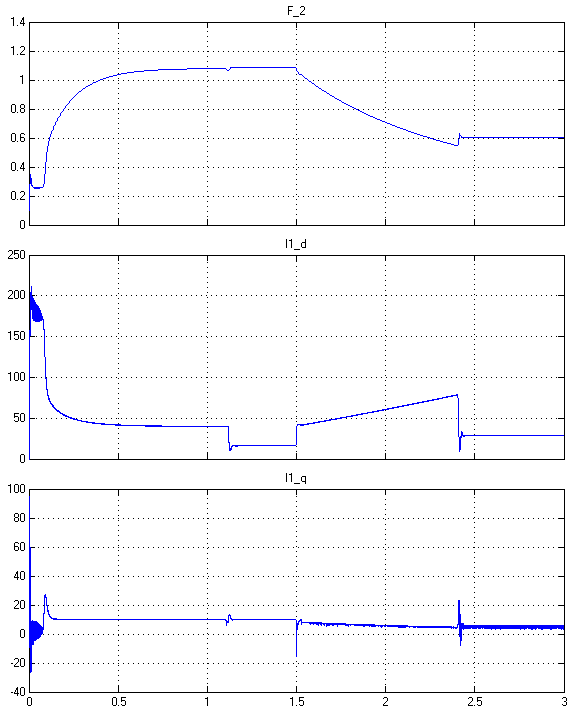
Рис. 10.4, б. Динамические характеристики при пуске электропривода на основную скорость (W=100 1/с, I зона) и выход через 1.5 на повышенную скорость (W=180 1/с, II зона) при МС= 50 Нм и
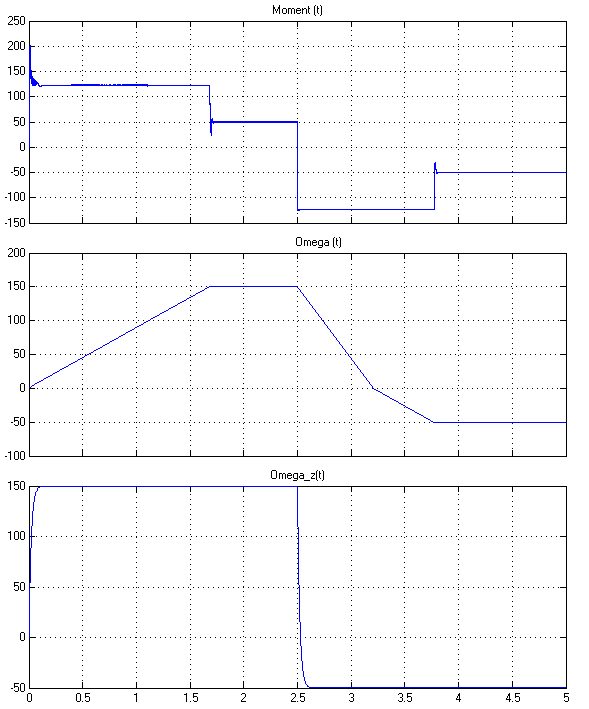
Рис. 10.5, а. Динамические характеристики при пуске электропривода на повышенную скорость (W=150 1/с, II зона) и реверсе в I зону (W=-50 1/с) при МС= 50 Нм
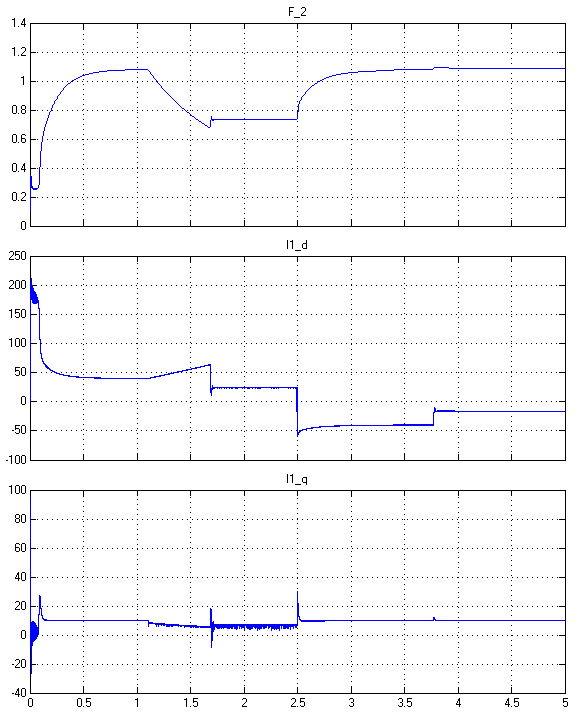
Рис. 10.5, б. Динамические характеристики при пуске электропривода на повышенную скорость (W=150 1/с, II зона) и реверсе в I зону (W=-50 1/с) при МС= 50 Нм





Изм.
Лист
Дата
№ докум.