

Построение структурной модели электропривода
Для проведения динамического анализа построим структурную модель функционального уровня электропривода механизма главного движения. В соответствии с функциональной схемой электропривода (рис. 9.1) модель будет содержать следующие функциональные блоки:
асинхронный электродвигатель;
преобразователь частоты (автономный инвертор напряжения);
регуляторы;
координатные преобразователи, блоки развязки и т.п.
Расчетные параметры электродвигателя 4А132S6У3 и механизма главного движения, который будем представлять абсолютно жесткой механической частью, представлены в табл. 9.1.
Таблица 9.1 .
Динамические параметры объекта управления
Наименование |
Обозначение |
Величина |
Электродвигатель 4А132S6У3 |
||
Номинальное напряжение |
Uн |
220 В |
Номинальный ток |
Iн |
12.2549 А |
Номинальный момент |
Мн |
54.3135 Нм |
Перегрузочная способность по моменту |
|
2.5 |
Номинальная скорость вращения |
nн |
967 об/мин |
н |
101.257 1/с |
|
Сопротивление фазы статора |
R1 |
1.1604 Ом |
Сопротивление фазы ротора |
R2 |
0.6850 Ом |
Индуктивность фазы статора |
L1 |
0.1125 Гн |
Индуктивность фазы ротора |
L2 |
0.1144 Гн |
Взаимная индуктивность |
L12 |
0.1086 Гн |
Коэффициент усиления преобразователя частоты |
kПЧ |
100 |
Механическая часть |
||
Приведенный момент инерции системы электропривода |
JS |
0.82 кг*м2 |

Структурная модель электродвигателя
Для построения структурной модели электродвигателя будем использовать исходное математическое описание, представленное в главе 9 в виде уравнений (9.1) – (9.6). После приведения уравнений к виду, удобному для построения структурной модели уравнения принимают вид:
 (9.1)
(9.1)
где
 (9.2)
(9.2)
Приведенные выше уравнения графически представим в виде функциональных блоков AD_DQ_F2, EMP_QD_F2, Moment_F2, внешнее и внутренне представление которых приведены на рис. 9.1 – 9.4.
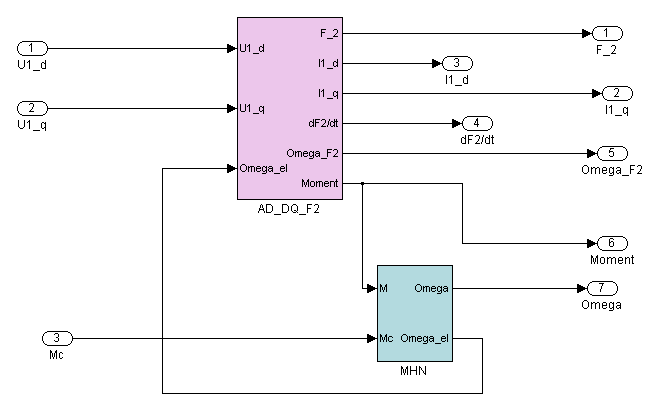
Рис. 9.1 Внутреннее представление функционального блока AD_MHN_F2
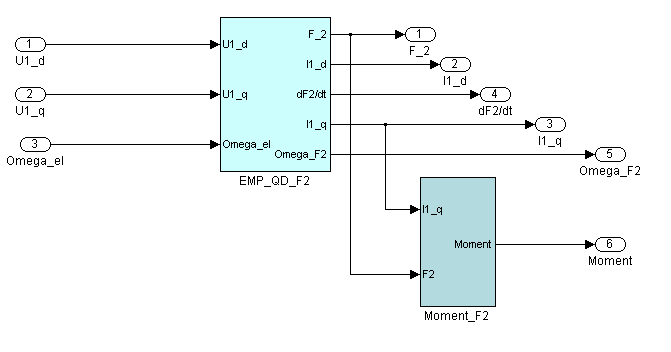
Рис. 9.2. Внутреннее представление функционального блока AD_DQ_F2
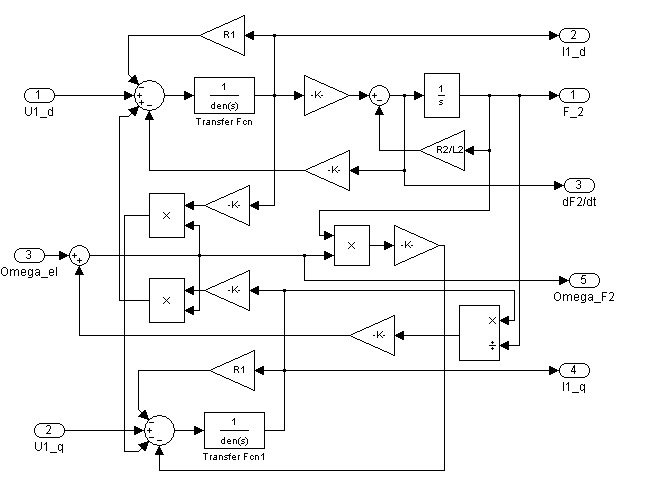
Рис. 9.3. Внутреннее представление функционального блока EMP_QD_F2

Рис. 9.4. Внутреннее представление функционального блока Moment_F2
Механическую часть электропривода представим в виде функционального блока МНN (рис. 9.1., 9.5).
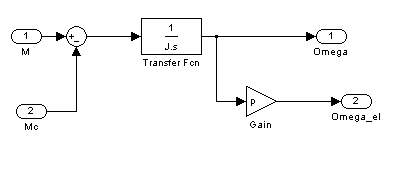
Рис. 9.5. Внутреннее представление функционального блока MHN
Определение номинальных значений потока сцепления ротора и реактивной составляющей тока статора
Для построения структурной модели электропривода в целом необходимо рассчитать номинальные значения потокосцепления ротора 2, реактивной составляющей тока статора Id и ЕДС ротора. Для получения этих значений выполним имитационный эксперимент прямого пуска электродвигателя при номинальных значениях напряжения и частоты сети, момента статического сопротивления.

Схема модели для этого эксперимента приведена на рис. 9.6. Там же в экранах соответствующих дисплеев можно прочитать значения необходимых координат

Динамические характеристики прямого пуска приведены на рис. 9.7.
Реактивную составляющую тока статора определим по формуле (9.18):

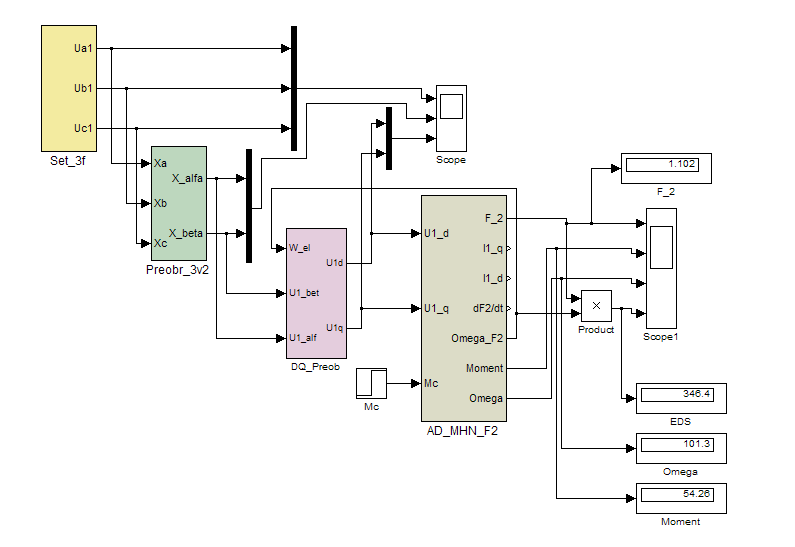
Рис. 9.6. Структурная модель прямого пуска электродвигателя от сети

Рис. 9.7. Динамические характеристики прямого пуска АД от сети