

Компоненты спутникового сигнала.
Назначение |
Коэффициент |
Частота (МГц) |
Базовая частота |
f0 |
10,23 |
Несущая L1 |
f1 = f0 154 |
1575,42 |
Несущая L2 |
f2 = f0 120 |
1227,60 |
Р-код |
f0 |
10,23 |
С/А-код |
f0 /10 |
1,023 |
Навигационное сообщение |
f0 / 204600 |
5,0 10-5 |
Несущие частоты, служащие для передачи сигнала в эфир, модулируются измерительными кодовыми последовательностями и бинарными кодами навигационного сообщения. При этом используется метод так называемой бифазной модуляции, что оказывается очень удобным, поскольку вся передаваемая в составе сигнала информация представлена в виде битовой последовательности из единиц и нулей. Идея метода заключается в управлении фазой синусоидального сигнала несущей при помощи кодов битовой последовательности k(t):
L(t)=asin[2ft+k(t)].
Когда кодовый сигнал k(t) изменяет свое состояние с 0 на 1 или наоборот, фаза скачком изменяется на 180° и, следовательно, знак синуса меняется на противоположный. Этот процесс схематически иллюстрирует рисунок 5.4.
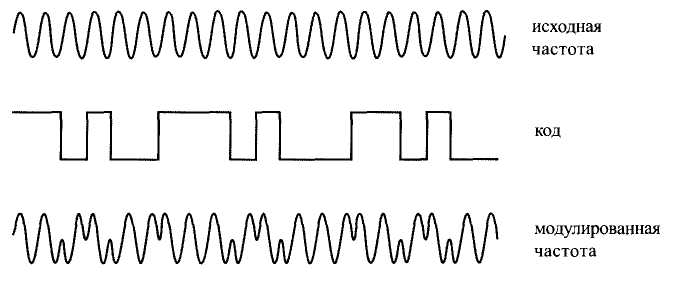
Рис 5.4 - Схема бифазной модуляции.
Обе несущие частоты L1 и L2 модулируются точным Р-кодом, что позволяет в дальнейшем при обработке принятых сигналов учитывать их задержку в ионосфере. Общедоступный С/А-код передается только на одной частоте L1, причем с фазовым сдвигом на 90° по отношению к P-коду для удобства их последующего разделения. Информация навигационного сообщения D передается также на двух несущих частотах. Таким образом, комбинированные сигналы, передаваемые со спутника, могут быть представлены следующими соотношениями:
L1(t) = a1P(t) D(t) cos 2(f1t) +a1C/A(t)D(t) sin 2(f1t),
L2(t) = a2P(t) D(t) cos 2(f2t). (5.1)
Обратимся теперь к структуре и содержанию навигационных сообщений. Объем одного сообщения (кадра) составляет 1500 бит. Кадр состоит из 5 субкадров (300 бит), содержащих по 10 слов (30 бит). Нетрудно подсчитать, что при тактовой частоте 50 Гц время передачи кадра составляет 30 секунд. Первые два слова каждого субкадра содержат телеметрическую и диагностическую информацию.
Основное содержание первого субкадра составляет информация о поправках часов спутника, представленных в виде коэффициентов квадратичного полинома, а также сведения о техническом состоянии систем спутника («здоровье»). Второй и третий субкадры содержат текущие значения Кеплеровых элементов орбиты данного спутника, а также коэффициенты полиномов и периодических функций, описывающих изменения орбитальных элементов со временем.
Четвертый и пятый субкадры, в отличие от первых трех, содержат информацию не только о данном спутнике, а обо всех спутниках системы: приближенные значения элементов их орбит («альманах»), статус работоспособности, поправки за влияние ионосферы и др. Объем этой информации достаточно большой - в четвертом и пятом субкадрах укладывается лишь 1/25 ее часть, поэтому она передается порциями в последовательности из 25 кадров. На их передачу уходит 12,5 минут. Столько времени понадобиться приемнику для подготовительного этапа захвата и отождествления сигналов спутников, если приемник установлен на новом месте и в его памяти отсутствует свежие значения альманаха.
5.1.5 Прием и обработка сигналов. Посланные со спутников сигналы несут информацию, необходимую для измерения дальностей и определения навигационных параметров (координат, скоростей и точного времени), но сам процесс измерений происходит в приемнике. Сейчас в мире число типов и модификаций приемников исчисляется сотнями, в них применяются различные ухищрения, чтобы ослабить влияние искажающих факторов и в наибольшей степени удовлетворить требованиям различных категорий пользователей. Но, тем не менее, основной принцип измерений во всех навигационных приемниках общий, и все они состоят из радиотехнической части, обеспечивающей прием сигнала, генератора частоты, микропроцессора, запоминающего устройства и устройства управления.
Всенаправленная антенна приемника может быть совмещена с ним, либо выполнена в виде отдельного выносного блока, в котором размещается также предварительный усилитель сигналов высокой частоты. Фазовый центр антенны и является той точкой, от которой измеряется расстояние до спутника. Усиленные сигналы поступают в радиочастотный блок, где происходит их демодуляция, в результате чего выделяется цифровая составляющая (измерительные коды и навигационное сообщение) и аналоговая (синусоидальная). На основе кварцевого генератора частоты, задающего внутреннюю шкалу времени приемника, воспроизводится сетка опорных сигналов подобных тем, что излучают спутники (шаблоны). Сопоставление принятых и опорных сигналов методом взаимной корреляции и дает возможность определить задержку сигнала на трассе, вычислить псевдодальности и искомые навигационные параметры.
Поскольку все спутники GPS передают сигналы на одной и той же паре несущих частот, в приемник поступает смесь сигналов всех спутников, находящихся над горизонтом. В процессе обработке принятых сигналов нужно решить следующие задачи:
выделить в потоке сигналов составляющие, относящиеся к конкретным спутникам;
разделить сигналы каждого спутника на кодовую последовательность, навигационное сообщение и чисто синусоидальную составляющую;
определить временной сдвиг принятых сигналов по отношению к опорным.
Может показаться удивительным, но все эти три задачи, а также еще и некоторые вспомогательные, решаются одновременно и на основе одного общего метода корреляционной обработки принятого и опорного сигналов. Суть этого метода состоит в перемножении сравниваемых сигналов при помощи специального аналогового или цифрового устройства - коррелятора. На выходе этого устройства образуются нормированные средние значения результата перемножения, фактически представляющие собой последовательность коэффициентов корреляции. Интервал усреднения здесь составляет 1-2 мс (напомним, что в одной миллисекунде укладывается 1023 тактовых импульса С/А-кода). Коэффициент корреляции, как известно, характеризует тесноту связи двух совокупностей случайных величин, в нашем случае - степень «похожести» принятого и опорного сигналов. В приемнике поочередно генерируются и подаются на вход коррелятора опорные сигналы с кодовыми последовательностями разных спутников. В результате на его выходе выделяется только та составляющая, которая коррелирует с поданным в данный момент опорным сигналом. При этом степень корреляции и, следовательно, уровень выходного сигнала достигают максимума, если временное смещение между сравниваемыми сигналами близко к нулю. В процессе измерений с помощью плавной автоматической перестройки временной задержки опорного сигнала определяется то ее значение, при котором корреляция максимальна. Именно это значение считается временным сдвигом между принятым и опорным сигналами, по которому и вычисляется псевдодальность.
Строго говоря, поскольку кодовые последовательности не чисто случайны, а через какой-то период повторяются, корреляционная обработка дает значения псевдодальностей с неопределенностью в целое число таких повторяющихся блоков (для С/А-кода - до 1 мс или, в пересчете на дальность, 300 км). Эта неопределенность снимается благодаря косвенной оцифровке повторяющихся блоков с помощью меток времени, содержащихся в составе навигационного сообщения и несущих информацию о дате и точном времени. Метки времени привязаны к тактовым импульсам навигационного сообщения, когерентным с сигналами опорного генератора и со всеми другими спутниковыми сигналами.
Точность измерения описанным способом характеризуется погрешностью порядка 1° фазы сигнала или 0,3 % длительности периода, в данном случае - периода следования кодовых импульсов. Следовательно, для С/A-кода эта погрешность составляет около 3 нс, а для Р-кода - 0,3 нс, или, в пересчете на псевдодальность, 1 м и 0,1 м.
В точных геодезических приемниках реализовано еще измерение фазового смещения самой несущей частоты по отношению к опорному сигналу. Поскольку периоды несущих в 154 и 120 раз короче тактовых периодов кодовых последовательностей, такие измерения позволяют повысить точность определения псевдодальностей до миллиметрового уровня. При этом, правда, удается измерить только дробную часть цикла в фазовом смещении, а целое число длин волн в измеряемой дальности остается неизвестным. Но эта проблема разрешается в ходе последующей совместной обработки измерений на двух или нескольких пунктах. Существуют, однако, и две чисто технические проблемы: как выделить синусоидальную составляющую из общего кодированного сигнала и как надежно разделить сигналы несущей частоты отдельных спутников - ведь ее значение для всех спутников одинаково.
Для решения первой задачи нужно точно знать структуру кодовых последовательностей. Но даже если она неизвестна, есть простое и изящное решение - нужно лишь сквадратировать принятый сигнал, т.е. умножить его на самого себя, в результате чего модуляция исчезнет. Это легко понять из рассмотрения формул (5.1): коэффициенты C/A(t), P(t) и D(t) в них, равные +1 или -1, при возведении в квадрат становятся все равными единице. Существуют и другие методы выделения чисто синусоидальных колебаний.
При решении задачи разделения несущих частот разных спутников используется тот факт, что вследствие движения спутников частоты принимаемых сигналов испытывают доплеровские смещения, разные для разных положений спутников и достигающих нескольких килогерц. Иначе говоря, реально значения несущих частот принимаемых сигналов разных спутников все-таки неодинаковы. В приемнике реализованы схемы автоподстройки частоты и фазы, которые корректируют опорные сигналы индивидуально для каждого спутника в соответствии с уравнениями его движения, чем и достигается селекция.
Вычислительное устройство приемника управляет его работой по заданным программам и производит обработку кодовых измерений. Текущие результаты - координаты и скорость приемника, а также точное время, отображаются на дисплее и записываются в запоминающее устройство. Фазовые измерения не обрабатываются, а лишь сохраняются в памяти.
5.1.6 Алгоритмы и точность координатно-временных определений
Рассмотрим определить координаты приемника и точное время. Идея решения этой задачи основана на решении уравнений вида (2.6). В вычислительном устройстве приемника именно этот способ и применяется для определения в реальном времени текущих навигационных параметров в несколько десятков метров по сигналам общедоступного С/А-кода. Между тем, потенциальная точность измерительной информации гораздо выше, и для ее реализации разработаны специальные приемы, позволяющие довести точность координатных определений до миллиметрового уровня. Это - дифференциальные методы и использование измерений фазы несущей.
5.1.7 Абсолютный и относительные методы измерений
Метод определения навигационных параметров, впрямую основанный на решении системы уравнений вида (2.6), называют абсолютным в том смысле, что он дает непосредственно значения координат в общеземной системе и поправку часов пользователя относительно эталонной шкалы времени. В противоположность этому, при использовании относительных методов искомые параметры определяют через разности измерений, полученных двумя приемниками, один из которых стоит на определяемой точке, а другой - на опорной, точные координаты которой известны. Смысл заключается в том, что при образовании разностей исключается влияние погрешностей, одинаково искажающих оба ряда измерений.
Пусть, например, с пунктов А и В одновременно измерены псевдодальности dA и dB до спутника S. Добавив к уравнению (2.6) поправки на влияние ионосферы dion, тропосферы dtr и совокупности других факторов d, запишем:
dA =dA-cδA+cδS+dion,A+ dtr,A+d,A
dB =dB-cδB+cδS+dion,B+ dtr,B+d,B
Образуем разность псевдодальностей:
dAB,S = dA - dB =dAB-cδAB+dion,AB+dtr,AB+d (5.2)
Здесь двойными индексами АВ символически обозначены разности между величинами, относящимися к пунктам А и В. Мы видим, что при образовании разностей между уравнениями (5.2) исключились поправки часов спутника δS. Предположим теперь, что с пунктов А и В в это же время измерены псевдодальности еще и до другого спутника Q. Образовав разности между ними, получим выражение dAB,Q, подобное (5.2). А теперь возьмем разности между значениями dAB,S и dAB,Q:
dAB,SQ = dAB,S - dAB,Q = dAB,SQ+dSQ,ion,AB+dSQ,tr,AB+dSQ,AB (5.3)
Разности псевдодальностей вида (5.2) принято называть одинарными, а вида (5.3) - двойными. Двойные разности исключают поправку часов приемников. Влияние других погрешностей в двойных разностях существенно ослабляется, особенно если пункты расположены не очень далеко друг от друга. При использовании фазовых измерений образование двойных разностей помогает еще разрешению неоднозначностей. Ценой же, которую за все это приходится платить, является то, что из решения системы разностных уравнений вида (5.3) можно получить только разности координат между пунктами (ХАВ, YAB, ZAB). Но потом, прибавляя их к известным заранее координатам исходного пункта А (ХА, YА, ZA), можно найти координаты определяемого пункта В (ХB, YB,ZB).
В некоторых современных типах навигационных приемников предусмотрена установка радиомодема, через который можно сразу передавать текущую измерительную информацию на вычислительную станцию. Такова сущность метода коррекции псевдодальностей. Этот метод может быть получен только при соблюдении условия, чтобы на опорной станции и определяемом пункте наблюдались одинаковые созвездия спутников.
5.1.8 Особенности обработки фазовых измерений
Мы уже говорили, точные геодезические приемники позволяют измерять временное смещение сигнала, принятого со спутника, относительно опорного сигнала приемника не только с помощью кодовых псевдослучайных последовательностей, но и непосредственно по фазовому сдвигу самой несущей. Правда, при этом невозможно измерить количество длин волн, укладывающееся на линии «спутник-приемник», но зато «хвостик» - дробная часть фазового сдвига, - измеряется очень точно.
В отличие от кодовых псевдодальностей фазовые измерения L выражается не в линейной мере (метрах), а в циклах с долями до 0,001 цикла. В момент, когда приемник осуществляет захват сигнала спутника, состояние счетчика целых циклов произвольно, и оно переносится в результат первого измерения L. В ходе последующих наблюдений этого же спутника расстояния до него меняются, и эти изменения точно отражаются в изменениях величины L. Таким образом, неизвестным является только одно целое число циклов N, которое надлежит добавить к первому и всем остальным измерениям, чтобы получились правильные значения псевдодальностей. Это справедливо до тех пор, пока наблюдения спутника идут непрерывно и без сбоев, которые могут происходить, например, из-за затухания радиосигнала. В таких случаях счетчик не может определить количество пропущенных циклов несущей частоты, и поэтому для последующего ряда наблюдений приходится вводить новый неизвестный параметр N'. Количество таких неизвестных равно количеству наблюдаемых спутников плюс общее количество перерывов. Определение их и представляет собой проблему разрешения фазовых неоднозначностей.
Для определения значений параметров N их можно включить в число неизвестных величин при обработке измерений методом наименьших квадратов. Но при частых сбоях количество дополнительных неизвестных может оказаться слишком большим, поэтому сначала выполняется анализ фазовых измерений с целью локализации пропусков и делаются попытки определения числа пропущенных циклов. Существуют разные приемы проведения такого анализа, основанные на сглаживании и прогнозе фазовых измерений, сопоставлении их с кодовыми измерениями и др.
Сама необходимость разрешения фазовых неоднозначностей обусловливает возможность применения к фазовым измерениям только относительного метода координатных определений. Уравнения для двойных разностей (5.3) при этом приобретают вид:
LSQ,AB =dSQ,AB+dSQ,ion,AB+dSQ,tr,AB+dSQ,,AB+NSQ,AB, (5.4)
где - длина волны несущей, a
NSQ,AB - двойная разность параметров неоднозначности.
В результате решения системы уравнений вида (5.4) методом наименьших квадратов получаются, конечно, вещественные значения неизвестных NSQ,AB , в то время как по смыслу - это целые числа циклов несущей частоты. Наиболее простой прием - округление вычисленных значений до ближайшего целого, вовсе необязательно даст верное искомое значение параметра NSQ,AB: согласно правилам теории вероятностей его следует искать внутри доверительного интервала, определяемого погрешностью вычисленного значения неизвестного. Это можно, например, сделать так: перебирая поочередно все целые числа внутри доверительного интервала, подставлять их в уравнения (5.4) на место NSQ,AB и решать их. Вариант, который даст наименьшую среднюю квадратичную погрешность решения, и определит вероятнейшее значение целого числа циклов. Но, как уже говорилось, количество неизвестных вида NSQ,AB на практике оказывается достаточно большим, так что число всевозможных комбинаций тестируемых целых чисел, с каждой из которых нужно решать систему уравнений, может достигать десятков тысяч. Это чересчур много даже для современной вычислительной техники, поэтому на практике используются различные упрощенные, но вполне эффективные стратегии поиска целочисленных значений NSQ,AB .
Вполне очевидно, что разрешение фазовых неоднозначностей должно быть выполнено для измерений на каждой из двух несущих частот. Но после того, когда целочисленные значения N NSQ,B установлены, можно образовать свободные от влияния ионосферы комбинированные значения фазовых измерений, подобные кодовым, и использовать уже их для решения уравнений (5.4).
5.1.9 Точность различных методов GPS-измерений
Многолетний опыт использования системы GPS позволил разработать методы для решения различных по назначению, требуемой точности и оперативности задач координатно-временных определений. В таблицах 5.2, 5.3 представлена классификация этих методов.
Непрерывные измерения ведутся на пунктах глобальных или региональных сетей с целью уточнения опорных систем координат, определения параметров вращения Земли, изучения дрейфа континентов и других геодинамических явлений, а также для контроля за деформациями инженерных сооружений.
Режимы статики представляют собой наиболее распространенный метод геодезической съемки с использованием фазовых измерений. Наблюдения на пунктах ведутся столько времени, сколько необходимо для разрешения фазовых неоднозначностей и достижения заданной точности. В режиме быстрой статики время пребывания на пункте сокращается за счет наблюдения большего количества спутников.
Таблица 5.2