

Классификация кинематических пар
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары.
Кинематические пары делятся на низшие и высшие.
Таблица 1
-
Wr
Sr
Название
пары
Рисунок
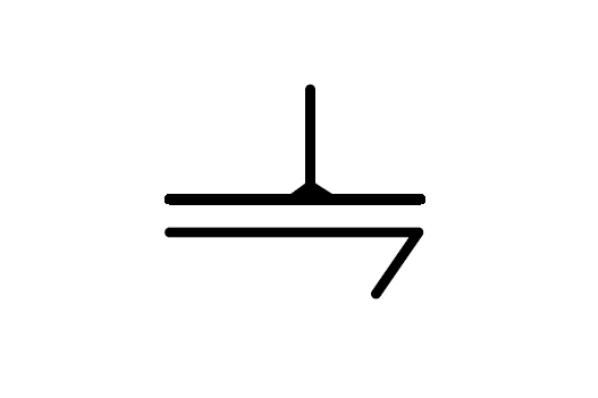
Условное
обозначение
1
5
Поступательная
1
5
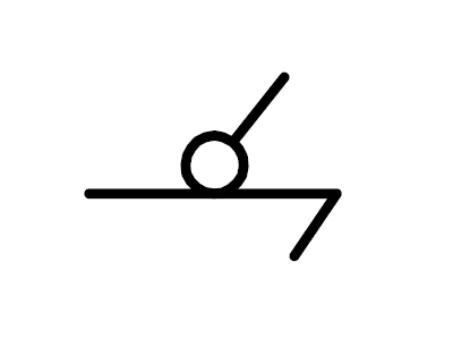
Вращательная
1
5
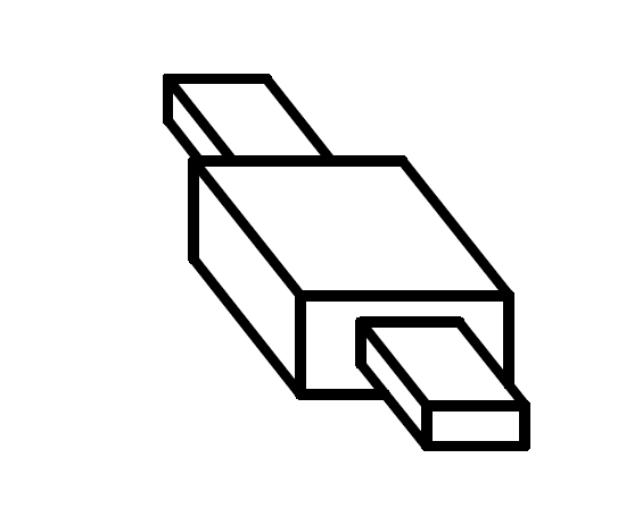
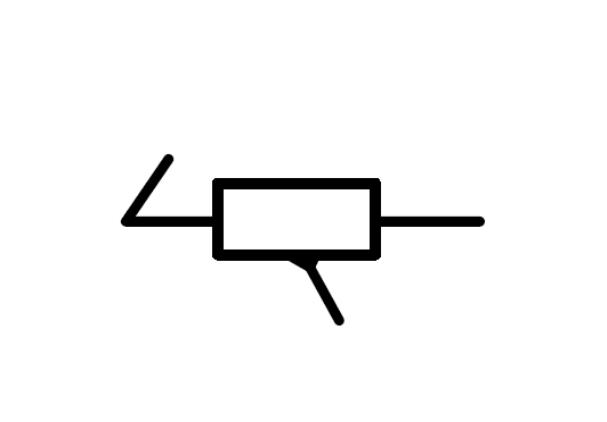
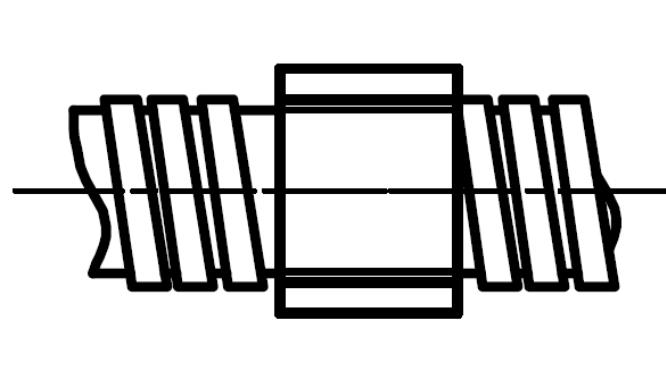
Винтовая
2
4
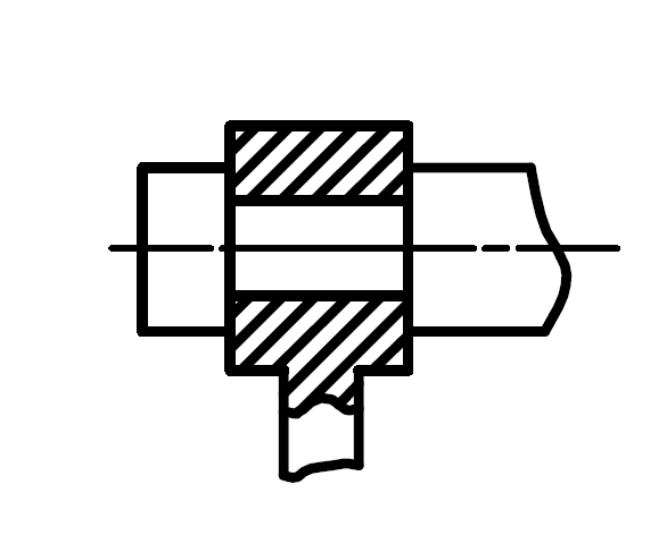
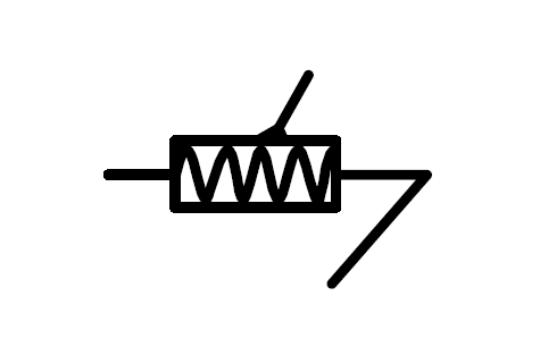
Цилиндрическая
2
4
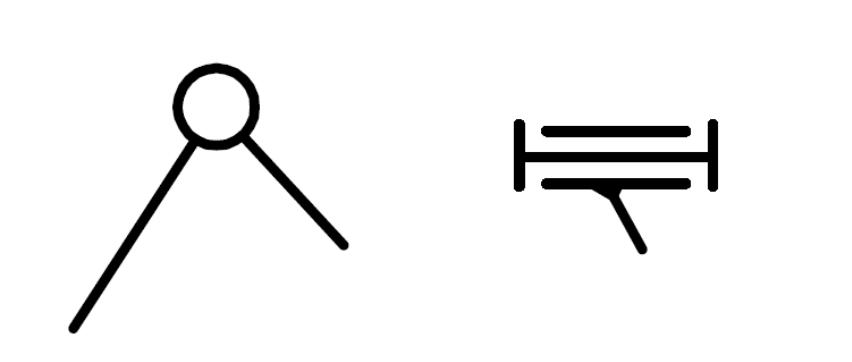
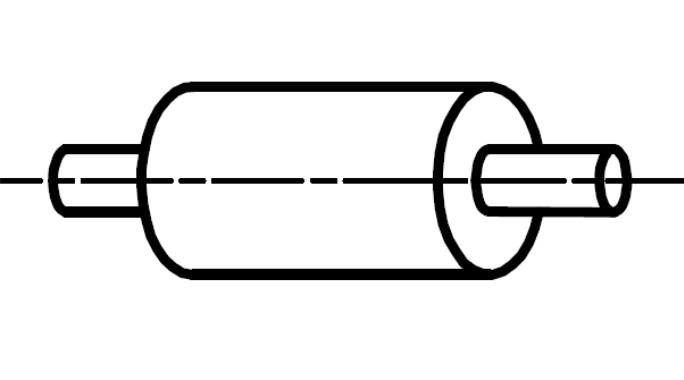
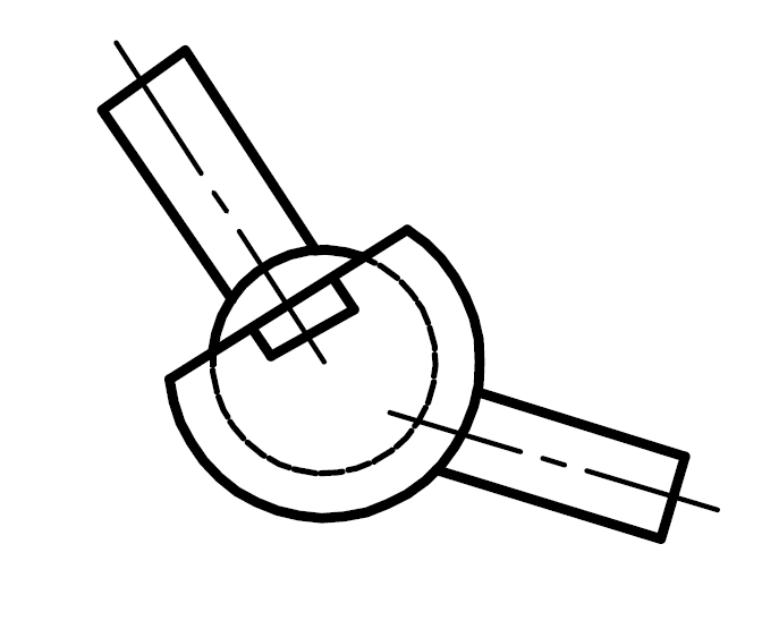
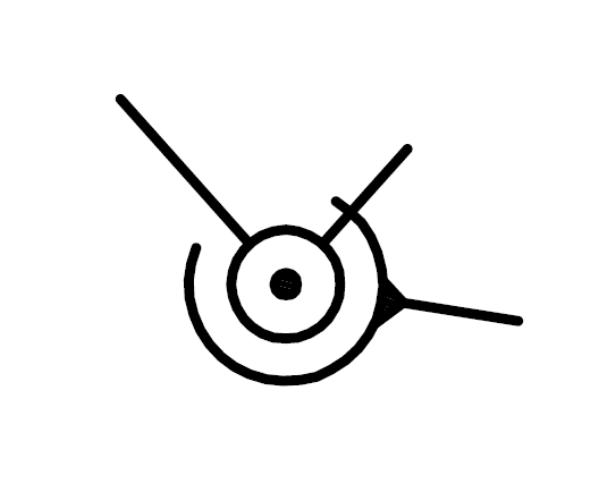
Сферическая
с пальцем
3
3
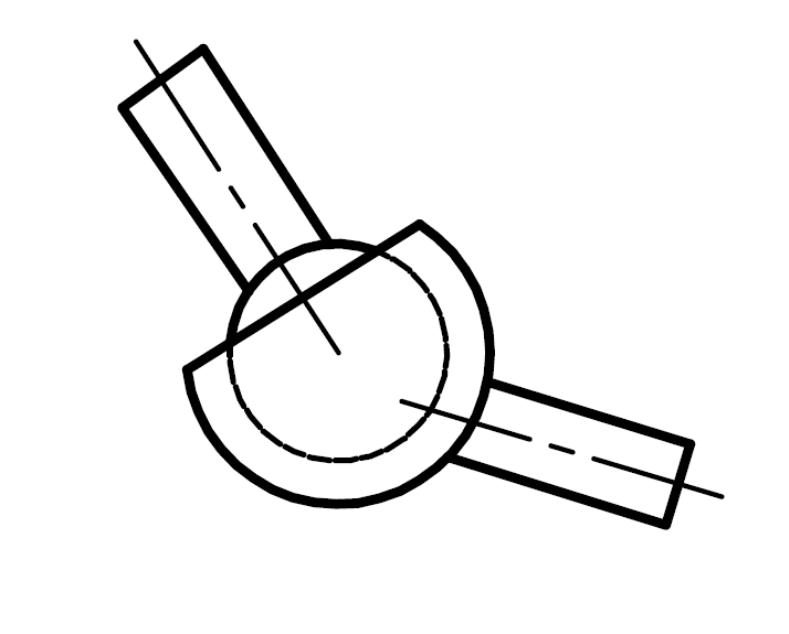
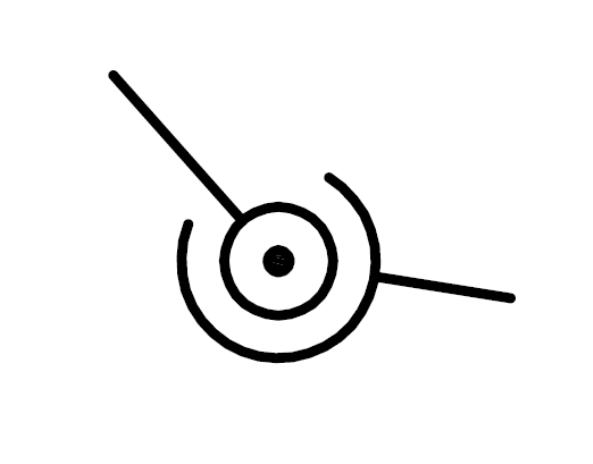
Сферическая
3
3
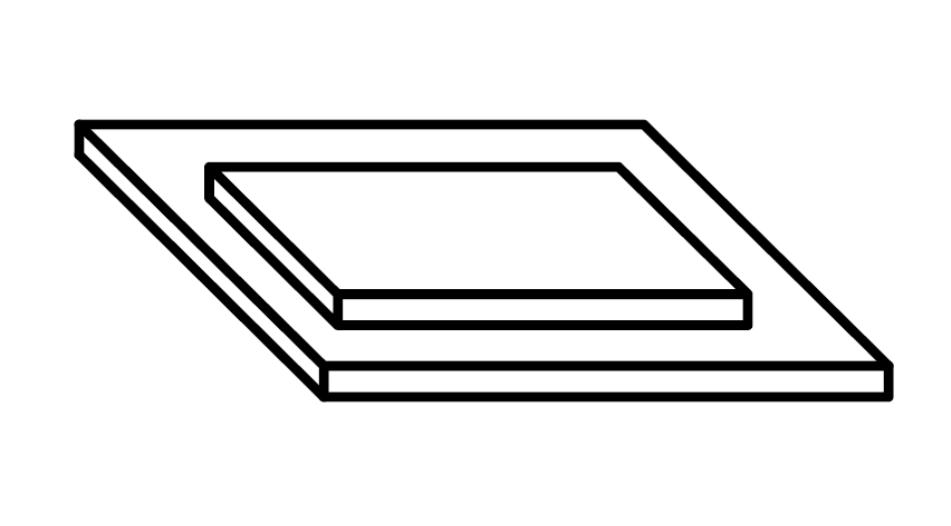
Плоскостная
4
5
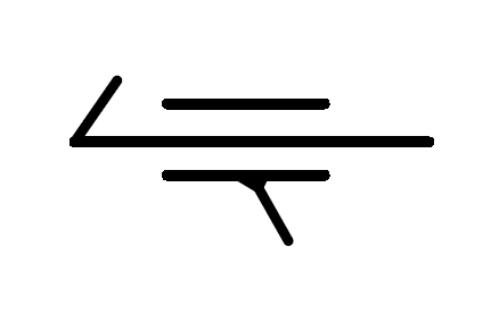
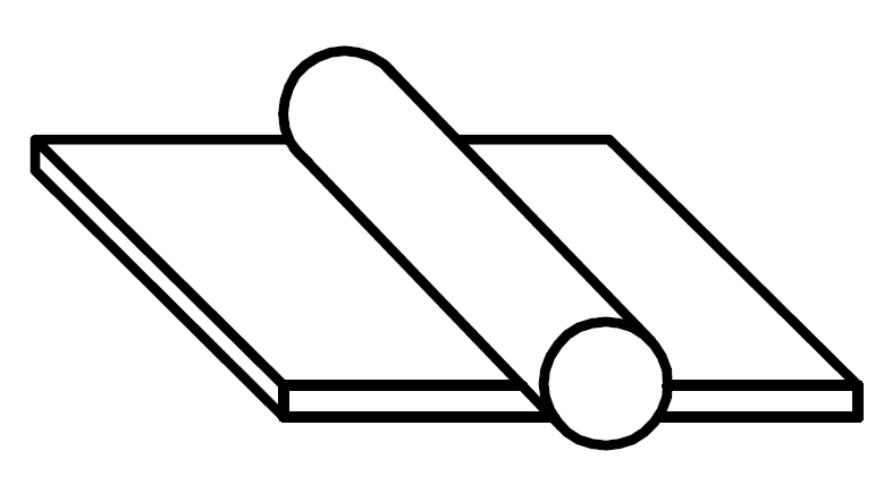
Цилиндр-плоскость

5
1
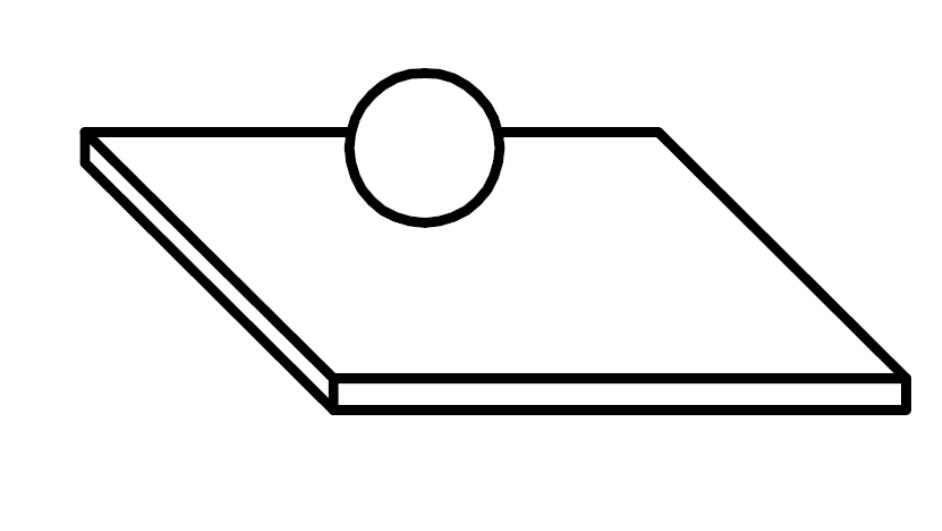
Шар-плоскость
Низшей называется кинематическая пара, в которой относительное движение двух звеньев может быть получено постоянным соприкосновением ее элементов по поверхности.
Высшей называется кинематическая пара, в которой относительное движение двух звеньев может быть получено соприкосновением ее элементов только линиями или точками.
Введем обозначения:
Н – число степеней свободы в относительном движении двух звеньев, образующих кинематическую пару;
S – число уравнений геометрических связей, налагаемых на относительное движение указанных звеньев.
Всегда выполняется равенство: Н+S=6.
Число S уравнений связей принимается за номер класса кинематической пары, а в зависимости от числа пары подразделяются на одно-, двух-, трех-, четырех- и пятиподвижные.
Так, если Н = 1 и соответственно S = 5, то данная пара является одноподвижной и относится к пятому классу.
В зависимости от характера относительного движения двух звеньев, кинематические пары могут быть различного вида. В табл.1 приведены девять видов кинематических пар вместе с соответствующими значениями Н и S, а также условными графическими обозначениями пар. Пары вида «цилиндр – плоскость» и «шар – плоскость» относятся к высшим, а семь предыдущих пар в табл.1 – к низшим. Для шести первых видов пар (см. табл.1) введем буквенные обозначения: П (поступательная), В (вращательная), Ви (винтовая), Ц (цилиндрическая), Сп (сферическая с пальцем) и С (сферическая).
Классификация механизмов и виды звеньев
Механизмы делятся на плоские и пространственные.
Механизм называется плоским, когда все точки его подвижных звеньев движутся во взаимно параллельных плоскостях. В других случаях механизм называют пространственным.
Среди всего многообразия механизмов выделяют следующие группы механизмов: рычажные, кулачковые, зубчатые, фрикционные, с гибкими связями (ременная передача, цепная передача) и др.
Звенья рычажных механизмов образуют друг с другом пары вида П, В, Ви, Ц, Сп или С, причем в плоских рычажных механизмах встречаются только одноподвижные пары - П и В.
За звеньями механизмов в зависимости от характера их движения закрепились определенные названия.
Кривошип – звено, которое образует вращательную пару со стойкой и может совершать полный оборот вокруг оси этой пары.
Коромысло – звено, которое образует вращательную пару со стойкой и может совершать только неполный оборот вокруг оси этой пары. С подвижным звеном кривошип и коромысло образуют, как правило, вращательную пару.
Ползун – звено, образующее поступательную пару со стойкой и движущееся прямолинейно - поступательно.
Шатун – звено, образующее кинематические пары только с подвижными звеньями.
Кулиса – звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару.
Кулачок – звено, которому принадлежит элемент высшей пары, выполненный в виде поверхности или кривой переменной кривизны.
Зубчатое звено – звено, имеющее выступы (зубья) для передачи движения посредством взаимодействия с выступами другого звена (тоже зубчатого). Вращающееся зубчатое звено называется зубчатым колесом.
В дальнейшем будем рассматривать плоские рычажные механизмы. Некоторые схемы плоских рычажных механизмов показаны на рис.1, рис.2 и рис.13.
В шестизвенном механизме первого типа (см. рис.1) входное звено 1 является кривошипом, звенья 3 и 5 – коромыслами, а звенья 2 и 4 – шатунами. В четырехзвенном механизме второго типа (рис.2) звено 1 – кулиса, 2 – шатун, 3 – коромысло. В четырехзвенном механизме первого типа (рис.13) входное звено 1 – ползун, звено 2 – шатун, а звено 3 — коромысло.
