

4.3. Схема дистанционной передачи
4.3.1.Схема дистанционной передачи сигнала с помощью неунифицированных дтп.
На рис.7 показана принципиальная схема дистанционной передачи сигнала измерительной информации первичного прибора на вторичный прибор с помощью неунифицированого ДТП.
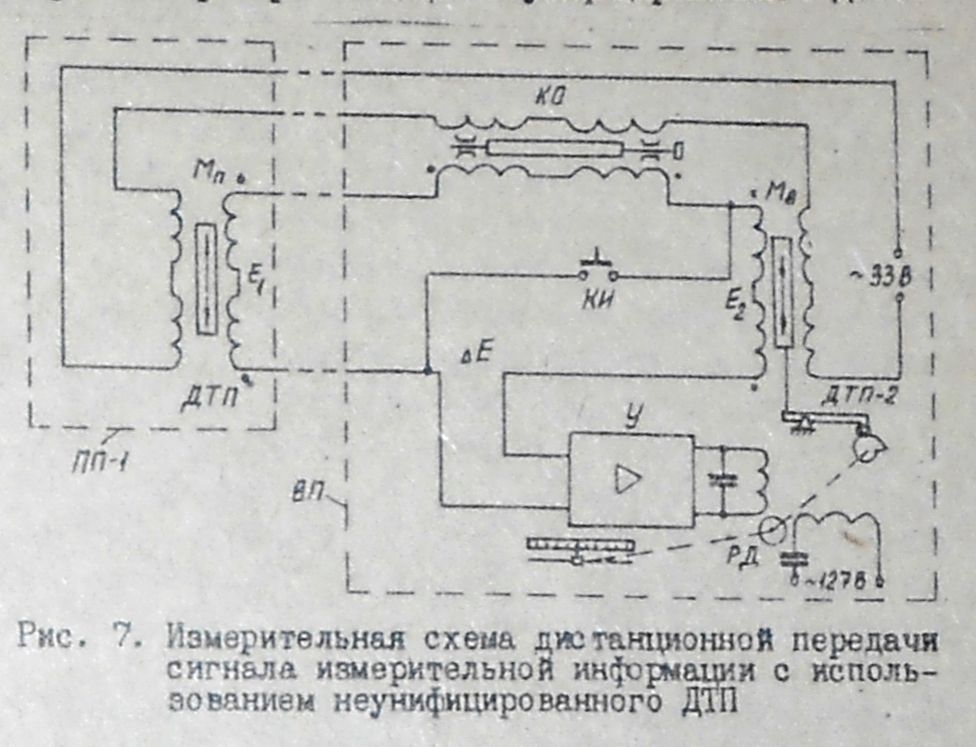
На рис. 7 приняты следующие обозначения: ПП-1 - первичный прибор; ДТП-передающий преобразователь первичного прибора; ВП-вторичный прибор; ДТП-2 компенсирующий преобразователь вторичного прибора; у-усилитель; РД-реверсивный двигатель, выходной вал которого через профилированный кулачок и рычаг соединен с сердечником компенсирующего преобразователя; К-каретка с указателем, кинематически связанная с выходным валом реверсивного двигателя; КО-корректор нуля - катушка с регулируемым сердечником, которая состоит из первичной обмотки и двух секций вторичной, включенных встречно; КИ-кнопка контроля исправности вторичного прибора.
Первичные обмотки ДТП, ДТП-2 и катушка КО соединены последовательно и питаются переменным напряжением 33 В, частотой 50 Гц от специальной обмотки силового трансформатора усилителя. Вторичные обмотки преобразователей соединены по компенсационной схеме.
Рассмотрим действие схемы. Считаем, что сердечник в катушке находится в среднем положении.
При
рассогласованных положениях сердечников
передающего и компенсирующего
преобразователей выходная ЭДС Е1
и компенсирующая Е2
не равны между собой и на вход усилителя
поступает сигнал небаланса ![]() значение и фаза которого зависят от
значения и напрвления рассогласования
сердечников. Сигнал небаланса
значение и фаза которого зависят от
значения и напрвления рассогласования
сердечников. Сигнал небаланса ![]() усиливается и приводит в
действие
реверсивный двигатель, выходной вал
которого с помощью кинематической связи
перемещает середечник преобразователя
ДТП-2 до тех пор, пока сигнал небаланса
уменьшаясь, не станет меньше порога
чувствительности усилителя. При
достижении баланса измирительной схемы
ротор реверсивного двигателя остановится,
а сердечник компенсирующего преобразователя
и каретка займут положение, соответствующее
определенному ходу сердечника
преобразователя ДТП первичного прибора,
а следовательно, и измеряемой величине.
При этом
усиливается и приводит в
действие
реверсивный двигатель, выходной вал
которого с помощью кинематической связи
перемещает середечник преобразователя
ДТП-2 до тех пор, пока сигнал небаланса
уменьшаясь, не станет меньше порога
чувствительности усилителя. При
достижении баланса измирительной схемы
ротор реверсивного двигателя остановится,
а сердечник компенсирующего преобразователя
и каретка займут положение, соответствующее
определенному ходу сердечника
преобразователя ДТП первичного прибора,
а следовательно, и измеряемой величине.
При этом ![]() и
и ![]() .
.
Нуль вторичного прибора корректируют с помощью сердечника катушки КО, вращал его до тех пор, пока стрелка вторичного прибора не установится против нулевой отметки с норированной погрешностью.
Для проверки исправностивторичного прибора предусмотрена перемычкас кнопкой КИ ("контроль"). При нажатии кнопки закорачиваются выходная цепь передающего преобразователя ДТП и вторичная обмотка катушки К0. Если прибор исправлен, то стрелка его должна устанавливаться против контрольной отметки на циферблате.
4.3.2. Схема дистанционной передачи сигнала с помощью унифицированных дтп.
Р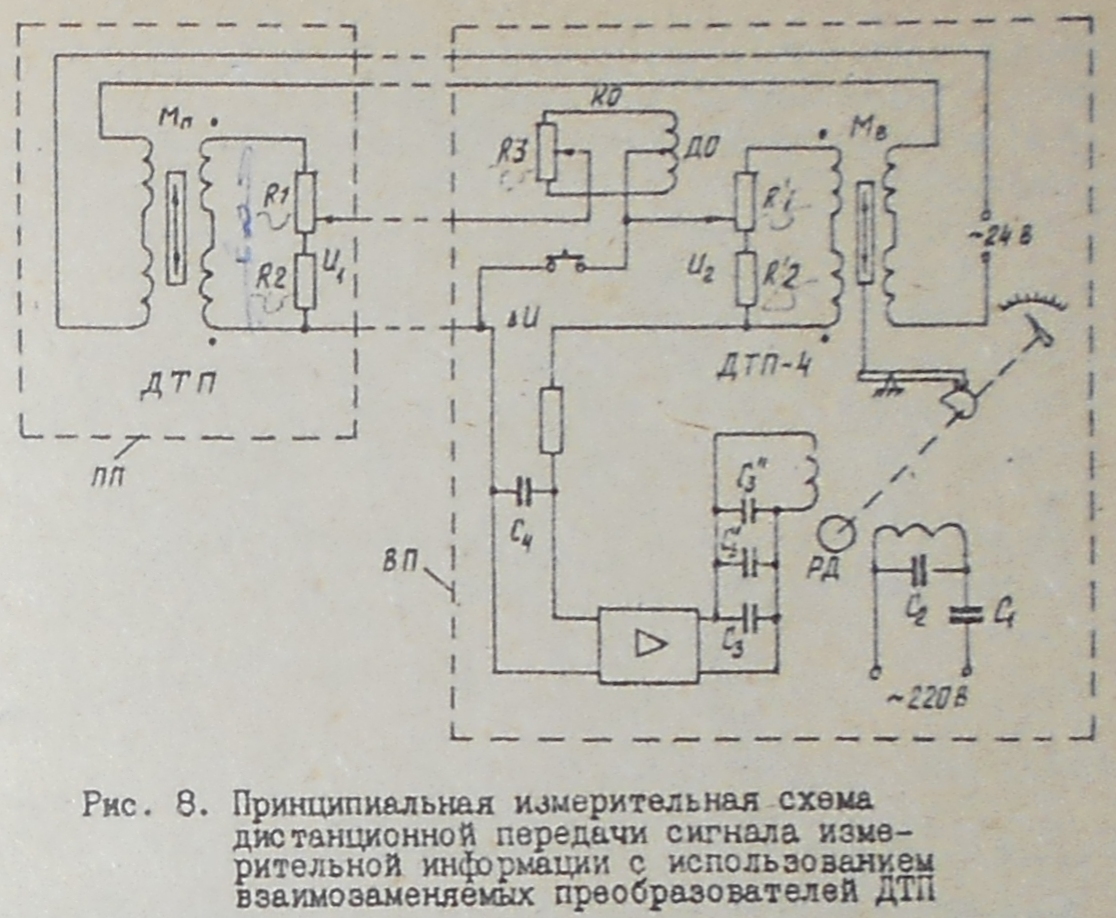 ассмотрим
принципиальную схему дистанционной
передачи сигнала измерительной информации
первичного прибора на вторичный прибор
с помощью унифицированых ДТП (рис. 8).
ассмотрим
принципиальную схему дистанционной
передачи сигнала измерительной информации
первичного прибора на вторичный прибор
с помощью унифицированых ДТП (рис. 8).
На схеме приняты следующие обозначение: ПП-первичный прибор;ДТП-передающий преобразователь первичного прибора; ВП-вторичный прибор; ДТП-4 - компенсационный преобразователь вторичного прибора;КО-корректор нуля, состоящий из обмотки ДО и регулируемого резистора R3, КИ-кнопка контроля исправности вторичного прибора; РД-реверсивный двигатель, выходной вал которого кинематически соединен с профилированным кулачком и рычагом, соединенным с сердечником компенсирующего преобразователя; RцС4 -фавосдвигающая цепочка. Остальные обозначения соответствуют приведенным ранее.
Первичные обмотки передающего ДТП и компенсирующего ДТП-4 преобразователей соединены последовательно и питаются переменным током напряжением 24 В, частотой 50 Гц от специальной обмотки силового трансформатора усилителя. Вторичные обмотки преобразоватилей соединены по компенсационной схеме.
Принцип действия измерительной схемы не отличается от расмотренной в п.4.3.1.
Нуль корретируют с помощью резистораR3.