

2.3 Опис схеми електричної принципової контролера і пристроїв узгодження з об’єктом
 Рисунок
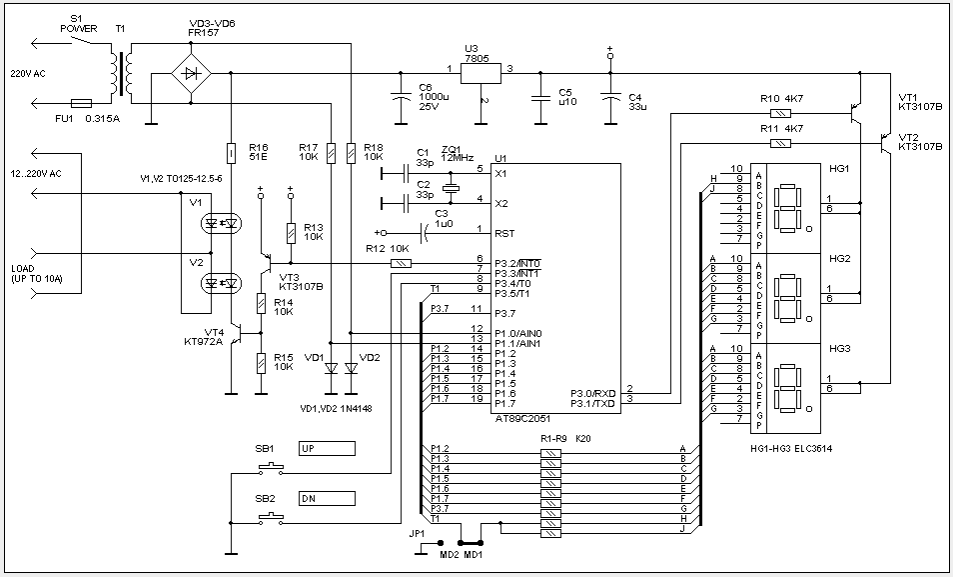
2.5. Електрична принципова схема
водонапірної башти
Рисунок
2.5. Електрична принципова схема
водонапірної башти
Схему електричну принципову пристрою розглянемо на прикладі мікросхеми КР1810ВБ89 , призначеної для реалізації пріоритетного безконфліктного доступу до системної шини мультипроцесорної системи. Арбітр шини дешифрує стан мультипроцесора, виробляє керуючі сигнали для організації доступу до шини типу Мультибас і керує контролерами шини й регістрами для фіксації адреси.
Арбітр шини складається з наступних функціональних блоків: дешифратора станів, що декодує стан мікропроцесора і формує сигнали, що надходять на схеми арбітражу й інтерфейсу системної шини; схеми арбітражу керуючої разом зі схемами арбітражу інших арбітрів пріоритетним доступом; схеми інтерфейсу системної шини, що виробляє сигнали запиту на захоплення системної шини і приймаючого сигналів підтвердження захоплення.
Таблиця 2.1. Опори
№ |
Номінал |
Аналог |
R1 |
20К |
- |
R2 |
20К |
- |
R3 |
20К |
P1-32 |
R4 |
20К |
- |
R5 |
20К |
- |
R6 |
20К |
- |
R7 |
20К |
- |
R8 |
20К |
- |
R9 |
20К |
СП5-39Б |
R10 |
4К7 |
- |
R11 |
4К7 |
- |
R12 |
10К |
- |
R13 |
10К |
- |
R14 |
10К |
СП5-39Б |
R15 |
10К |
- |
R16 |
51Е |
- |
R17 |
10К |
- |
R18 |
10К |
МЛТ-0,5 |
Таблиця 2.2. Конденсатори
№ |
Номінал |
Аналог |
С1 |
33р |
- |
С2 |
33р |
K53-19 |
С3 |
1u0 |
K53-19 |
С4 |
33u |
- |
С5 |
u10 |
- |
С6 |
25V |
K50-35 |
Таблиця 2.3. Транзистори
№ |
Номінал |
Аналог |
VT1 |
- |
KT315A |
VT2 |
- |
KT315A |
VT3 |
- |
KT326 |
VT4 |
- |
- |
2.4 Опис структурної схеми джерела живлення
У даному проекті було використано універсальній блок живлення, який вказано на рисунку 2.4.
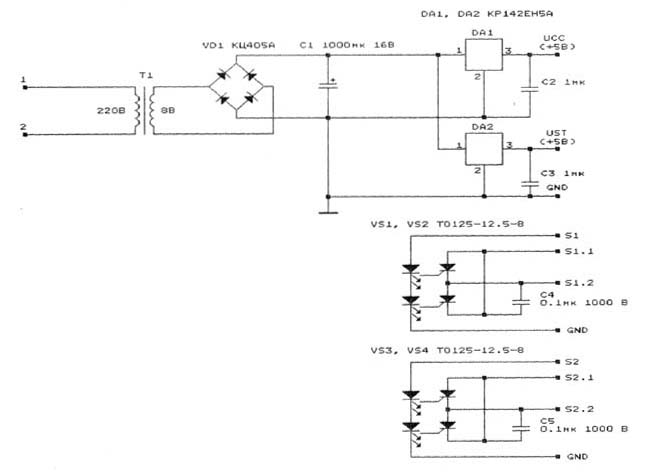
Рисунок 2.4. Схема блока живлення
Пристрій доповнений зарядним пристроєм, виконаним на елементах Da2, r7, R8, R9, R10, Vd2, С7. ІС стабілізатора напруги Da2 з дільником струму на R7. R8 обмежує максимальний початковий струм заряду, дільника R9, R10 задає вихідну напругу заряду, діод Vd2 захищає АКБ від саморозряду за відсутності напруги живлення.
Захист від перегріву використовує як датчик температури терморезистор R16. При спрацьовуванні захисту включається звуковий сигналізатор, зібраний на ІС DD 1 і, одночасно, навантаження відключається від стабілізатора, переходячи на живлення від АКБ.
Терморезистор вмонтовують на радіаторі транзистора Vt1. Точне підстроювання рівня спрацьовування температурного захисту здійснюється опором R18.
Таблиця 2.1. Опори
№ |
Номінал |
Аналог |
R1 |
20К |
- |
R2 |
20К |
- |
R3 |
20К |
P1-32 |
R4 |
20К |
- |
R5 |
20К |
- |
R6 |
20К |
- |
R7 |
20К |
- |
R8 |
20К |
- |
R9 |
20К |
СП5-39Б |
R10 |
4К7 |
- |
R11 |
4К7 |
- |
R12 |
10К |
- |
R13 |
10К |
- |
R14 |
10К |
СП5-39Б |
R15 |
10К |
- |
R16 |
51Е |
- |
R17 |
10К |
- |
R18 |
10К |
МЛТ-0,5 |
Таблиця 2.2. Конденсатори
№ |
Номінал |
Аналог |
С1 |
33р |
- |
С2 |
33р |
K53-19 |
С3 |
1u0 |
K53-19 |
С4 |
33u |
- |
С5 |
u10 |
- |
С6 |
25V |
K50-35 |
Таблиця 2.3. Транзистори
№ |
Номінал |
Аналог |
VT1 |
- |
KT315A |
VT2 |
- |
KT315A |
VT3 |
- |
KT326 |
VT4 |
- |
- |
2.5 Розробка та опис алгоритму керування
2.5.1 Розробка графу стану системи керування
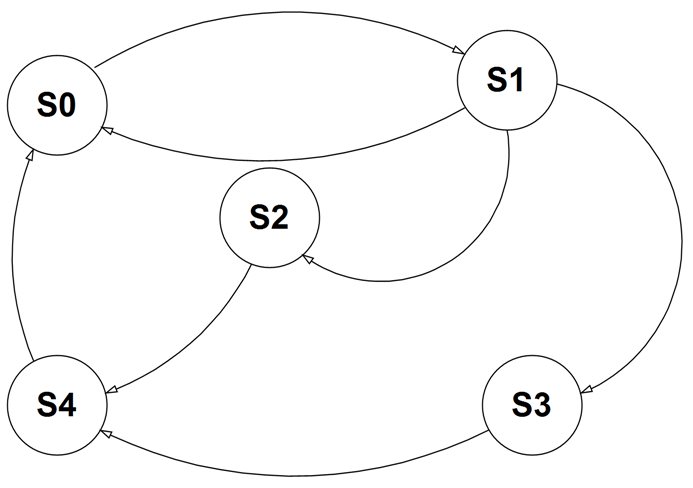
Рисунок 2.6. Граф стану системи керування
S0-S1 Подвійне натиснення кнопки «пуск»;
S1-S0 Немає енергії;
S1-S2 Датчик 2, 3- активні, датчик 1 неактивний;
S2-S4 Спрацювала кнопка «Стоп»;
S4-S3 Натиснута кнопка «Стоп»;
S1-S3 Датчик 1 активний, активні всі;
S4-S0 Відсутність електроенергії;
2.5.2 Алгоритм керування
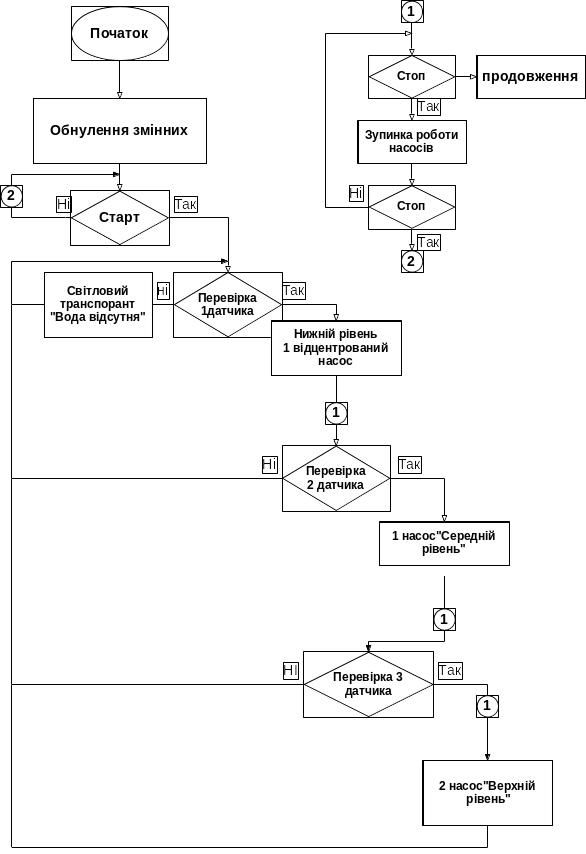
Рисунок 2.7. Алгоритм керування
2.5.3 Ініціалізація змінних і призначення портів.
Таблиця 2.4. Таблиця ініціалізації змінних
Змінна |
Призначення |
Порт |
Start |
Кнопка «Старт» |
P0.0 |
Stop |
Кнопка «Стоп» |
Р0.1 |
DatNiz |
Датчик нижнього рівня |
P0.2 |
DatSer |
Датчик середнього рівня |
P0.3 |
DatVer |
Датчик верхнього рівня |
Р0.04 |
RivVer |
Світловий транспарант «рівень верхній» |
P3.0 |
RivNiz |
Світловий транспарант «рівень нижній» |
P3.2 |
RivSer |
Світловий транспарант «рівень середній» |
P3.1 |
Nasos1 |
Перший насос |
P3.3 |
Nasos2 |
Другий насос |
P3.4 |
VoduNet |
Світловий транспарант «води немає» |
P3.5 |
2.5.4 Алгоритм з використанням змінних.
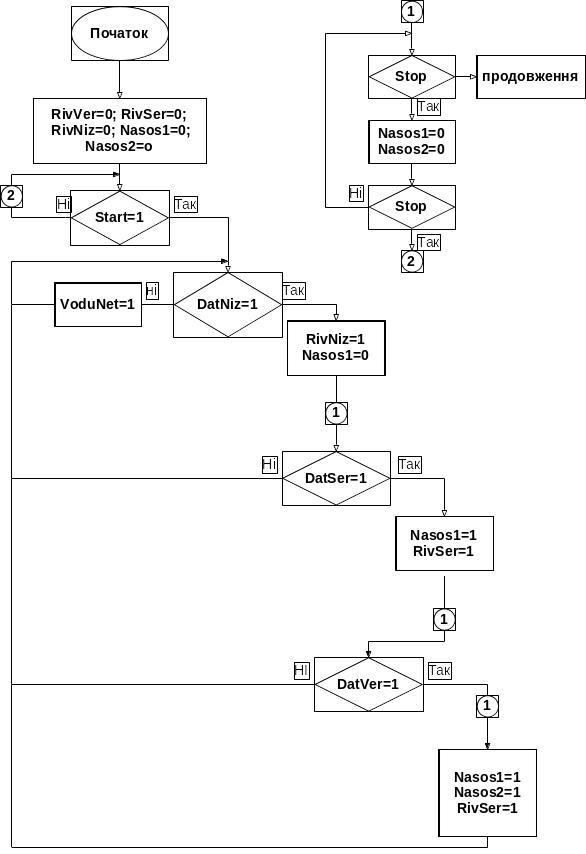
Рисунок 2.8. Алгоритм з використанням змінних
2.6 Опис програмного забезпечення
Для написання програмного забезпечення була використана мова низького рівня Асемблер.
Редагування та відладку програми для системи керування виконано в програмі MCStudio.
Було використані наступні команди:
- Clr – скидання біта, порт привласнює логічний 0, тобто відключає певний
пристрій або датчик;
clr RivVer
- Setb – установка біта, порт привласнює логічну 1, тобто включає певний
пристрій або датчик;
setb VoduNet
- Jnb – умовний перехід при значенні;
jnb Start,A06
- Lcall – виклик підпрограми функції;
- Nop – пуста операція (не виконує ніяких дій);
- Djnz – виконує зменшення змінної на одиницю, якщо ця змінна не
дорівнює нулю, то переходимо на мітку
djnz Count_1,D3
- mov – переслати перемінну-байт;
mov Timer,#3
- ret – повернення з підпрограми функції;