

ВСТУП
ЕОМ отримали широке поширення, починаючи з 50-х років. Колись це були дуже великі і дорогі пристрої, що використовуються лише в державних установах та великих фірмах. Розміри і форма цифрових ЕОМ невпізнанно змінилися в результаті розробки нових пристроїв, званих мікропроцесорами.
Мікропроцесор (МП) - це програмно-керований електронно-цифровий пристрій, призначений для обробки цифрової інформації і керування процесом цієї обробки, виконане на одній або декількох інтегральних схемах з високим ступенем інтеграції електронних елементів.
У 1970 році Маршіан Едвард Хофф із фірми Intel сконструював інтегральну схему, аналогічну за своїми функціями центральному процесору великої ЕОМ - перший мікропроцесор Intel-4004, який вже в 1971 році був випущений у продаж.
15 Листопада 1971 можна вважати початком нової ери в електроніці. У цей день компанія приступила до постачань першого в світі мікропроцесора Intel 4004.
Це був справжній прорив, бо МП Intel-4004 розміром менш 3 см був продуктивніше гігантської машини ENIAC. Правда працював він набагато повільніше і міг обробляти одночасно тільки 4 біти інформації (процесори великих ЕОМ обробляли 16 або 32 біта одночасно), але і коштував перший МП в десятки тисяч разів дешевше.
Мікропроцесорні системи у свою чергу забезпечили широке використання цифрових методів у різних технічних застосуваннях, і розмах упровадження цих нових методів розглядається як революція в техніці [1].
Мікропроцесор являє собою функціонально закінчений пристрій, що складається із однієї або декількох програмно керуємих ВІС, та слугує для виконання операцій з обробки інформації та керування обчислювальним процесом. До числа внутрішніх схем мікропроцесора відносяться багаторозрядні регістри, рівнобіжні тракти даних, буфери для підключення зовнішніх пристроїв, багатофункціональні схеми, логічні схеми синхронізації і керування.
Центральне місце в структурі мікропроцесорних приладів займає мікропроцесор, який виконує арифметичні та логічні операції над даними, програмне керування процесом обробки інформації, а також організує взаємодію усіх пристроїв, що входять до складу системи.
Багатофункціональні схеми призначені для реалізації простих арифметичних і логічних дій над двійковими числами, що знаходяться в регістрах процесора, і пересилок даних як усередині процесора, так і між ним і зовнішніми пристроями.
Розвиток інтегральної технології і схемотехніки цифрових електронних схем призвів до появи інтегральних мікросхем із великою і дуже великою ступенями інтеграції (ВІС і ДВІС), що містять на однім кристалі (в однім корпусі) декілька десятків тисяч, а в останніх розробках сотні тисяч елементарних транзисторів. На основі таких схем створюються мікропроцесори функціонально закінчені, що управляються збереженою в пам'яті програмою, це (здебільшого малорозрядні) пристрої опрацювання цифрової інформації, виконані у виді однієї або декількох ВІС або ДВІС [2].
Створення мікропроцесорів (МП) є великим досягненням мікроелектроніки та обчислювальної техніки, оскільки МП одночасно є елементом електронної техніки та одним з основних блоків обчислювальної машини, а саме - процесором, призначення якого виконувати дві основні функції:
1) обробка цифрової інформації;
2) управління процесом обробки інформації та роботою решти вузлів обчислювальної машини.
Однак, згодом стало ясно, що МП можуть бути використані і в технічних пристроях автоматики, інформаційно-вимірювальної техніки, радіоелектроніки, тощо, алгоритм функціонування яких характеризується так званою "жорсткою" логікою роботи, що задається апаратними (технічними) засобами. Використання МП для побудови пристрою чи системи приводить до того, що структура пристрою стає універсальною, тобто стандартною. А стандартизація структури має ту перевагу, що скорочується час та зменшується вартість проектування. Крім цього МП надає пристроєві гнучкості, яка полягає в тому, що зміна функції пристрою досягається зміною програми, яка записана в його пам'яті - це є найбільшою перевагою. В цьому випадку з'являється можливість змінювати характеристики пристрою чи системи без будь-яких переробок монтажу чи друкованих плат. Тепер дуже легко можна вносити в процесі відладки зміни в уже виготовлений пристрій чи систему, модифікуючи її характеристики і параметри шляхом заміни програми.
Другою перевагою є те, що вироби на основі МП дешеві. МП можуть замінити 75-200 корпусів інтегральних схем малої та середньої степені інтеграції, в мікропроцесорній системі менше з'єднань, менше друкованих плат, відладка системи значно простіша, а відповідно і вартість проектування в цьому випадку нижча. Крім того, з'являється можливість надати цим пристроям нові функції, реалізація яких при "жорсткій" логіці роботи була недоцільною, бо суттєво ускладнювалися як самі пристрої так і процес їх виготовлення та наладки [3].
Отже використання мікроконтролерів дає змогу заощадити час та кошти в промисловості. Полегшило життя людей, проштовхнуло вперед розвиток технічного прогресу та засобів автоматизації.
1. СТАН ПИТАННЯ ТА ПОСТАНОВКА ЗАВДАННЯ
1.1 Опис об’єкта керування з погляду автоматизації.
Мета керування – розробити автоматизовану систему керування «Зварювалний апарат».
Задача керування – спроектувати контроллер для керування процесом зварювання.
Пристрій управління – мікроконтролер MCS-51.
Об’єкт керування –зварювальний пристрій.
Виконавчі механізми – блок живлення, блок комутації, блок індикації.
Мікроконтролер керує таким чином з блоку комутації на його входи поступає сигнал відповідної дії.
Опис роботи:
Робота починаэться після увімкнення джерела живлення в натискання кнопки "Пуск" а закінуэться після натисканя кнопки "Стоп".
Сітка формуэться у вигляді карток розміром 80 х 30 комірок. Перед
зварюванням робітники укладають на рухливий стіл у напрямні проволку у вигляді відповідних заготовок. Пвсля цього включаэться джерело живлення контроллера й виробляэться точкове зварювання місци перетинання вертикальних і горизонтальних проволок.
Переміщення виконуэться двома приводами: горизонтальним і вертикальним. Контроль переміщення виконуэться за допомогою двох датчиків кроку ввдповідно до горизонтального та вертикального.
У вихідному стані стіл розташований верхнім правим кутом під електродами зварювання.
Автомат включаэ привод притиску електродів і на 0,5 сек. подає напругу на електроди. Потім включає горизонтальний привод сьола і рухається на крок(3 імпульси з відповідного датчика), контролюючи положення датчиком. Таким чином, відбувається зварювання одного горизонтального ряду. Після чого робиться один крок по вертикалі( 8 імпульсів з відповідного датчика)й відбувається зварювання наступного горизонтального ряду, вже рухаючись у зворотному напряму.
По закінченню зварювання всієї сітки, стіл розміщується у вихідне положення, і автомат очікує наступної команди на обробку сітки.
1.2 Огляд аналогів.
1) Показана схема машина контактного зварювання МТ-501.
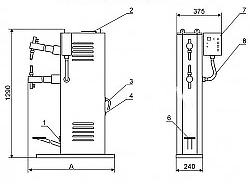
Рисунок 1.1. Машина контактного зварювання МТ-501.
Склад:
1 - Вузол регулювання розчину електродів; 2 - вузол регулювання зусилля стиснення; 3 - мережевий провід;
4 - пристрій заземлення ; 5 - ножна педаль привода верхнього електрода ; 6 - пульт керування; 7 - кабель керування;
Машина контактной точечной сварки МТ-501 предназначена для контактной точечной сварки изделий из малоуглеродистой и низколегированной стали на переменном токе. Принцип работы машины основан на протекании сварочного тока через сжатые с необходимым усилием детали в течение заданного времени. Сжатие деталей между электродами осуществляется с помощью педали с ножным приводом. - ступенчатое регулирование выходного напряжения, - плавное регулирование длительности прохождения сварочного тока, - наличие защиты от перегрева, - работа по циклу от нажатия педали, - регулировка усилия сжатия и раствора электродов, - класс изоляции Н по ГОСТ 8865–70, - водяное охлаждение электродов
Технічні характеристики Назва параметру |
Значення |
|
Напруга мережі,В |
2*380 |
|
Частота мережі, Гц |
50 |
|
Число ступенів регулювання |
2 |
|
Найбільший вторинний струм, кА |
5 |
|
Найбільший робочий струм, кА |
2,5 |
|
Виліт електродів, мм |
|
|
Найбільше зусилля стиску кГ/см2 |
275 або 500 |
|
Номінальний розчин електродів, мм |
25 |
|
Товщина зварювальних матеріалів: Листи Стержні круглого перерізу |
Від 0,5+0,5, від 2,0+2,0 5+5 |
|
Продуктивність, зварок/хв. |
5-15 |
|
Габаритні розміри, мм |
250*500*1350 |
|
Маса,кг |
100 |
|
2 СПЕЦІАЛЬНА ЧАСТИНА
2.1 Опис структурної схеми керування.
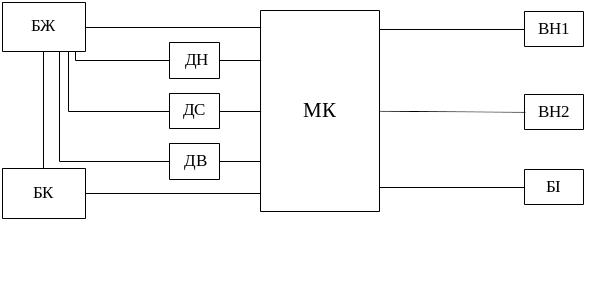
Рисунок 2.1. Структурна схема керування
Опис структурної схеми керування:
БЖ – за допомогою блока живлення на вхід контролера подається живляча напруга 220 В;
БК – набір кнопок, які підключені до вхідних портів мікроконтролера. При натисканні кнопки «Пуск» виконується початок роботи, а при натисканні кнопки «Стоп» - закінчення робочого процесу;
БІ - призначений для забезпечення візуального спостереження за функціонуванням контролера;
ДН – датчик нижнього рівня;
ДС – датчик середнього рівня;
ДВ – датчик верхного рівня ;
МК- мікроконтролер- пристрій управління об'єктами, який координує роботу об'єктів управління;
ВН1 – відцентрований насос №1
ВН2 – відцентрований насос №2
2.2 Вибір елементної бази.
1 Мікроконтролер MCS-51.
Основою створюваного пристрою є мікроконтролер MCS – 51, який керує роботою всіх вузлів. Основу структурної схеми МК51 утворює внутрішня двонаправлена 8-бітова шина, яка зв'язує між собою всі основні вузли і пристрої: резидентну пам'ять, АЛП, блок регістрів спеціальних функцій, пристрій управління і порти введення/виведення.
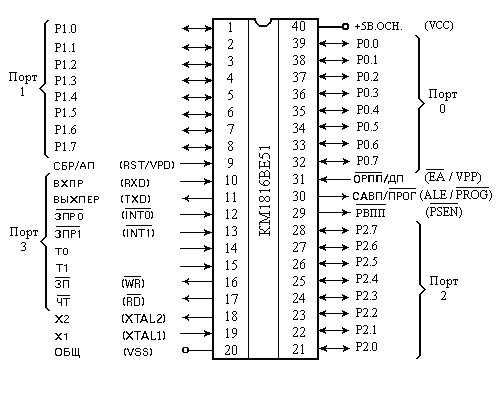
Рисунок 2.2. Корпус МК51 та найменування портів
Важливі особливості і застосування:
складається з процесорного ядра (CPU), ОЗП, ПЗП, послідовного порта, паралельного порта, логіки управління, таймер і т. д;
8-ми бітова шина даних (можливість обробки 8 біт даних за одну операцію);
16- ти бітова адресна шина (можливість доступу до 216 адрес пам'яті, тобто 64 кБ адресний простір в ОЗП і ПЗП);
вбудоване ОЗП 128 байт (пам`яті даних);
вбудоване ПЗП 4 КБ (пам`яті програм);
чотири двонаправлені порти введення/виведення;
UART (універсальний асинхронний прийомопередатчик);
два 16-бітових таймера;
два рівні пріоритету переривань;
енергозберігаючий режим.
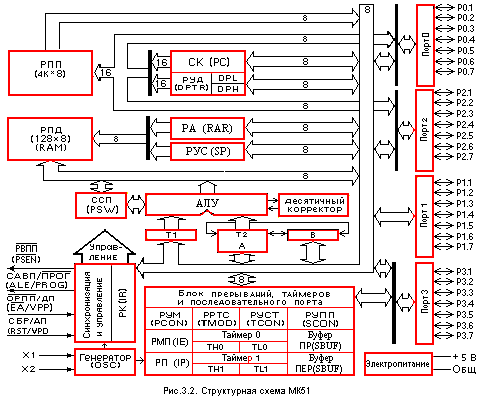 Рисунок
2.3. Схема принципу роботи мікроконтролера
MCS–51
Рисунок
2.3. Схема принципу роботи мікроконтролера
MCS–51
Корисною особливістю 8051 ядра є обробка булевих даних, що дозволило ввести бінарну логіку, що оперує безпосередньо з бітами внутрішньою ОЗУ (області з 128 бітів, що прямо-адресуються) і регістрів. Дана особливість була востребованна в додатках індустріальної автоматики. Ще одна цінна особливість полягала в 4 незалежних наборах, які значно зменшували затримки при обробці, порівняно з класичним використанням, що застосовувалося раніше.
Універсальний асинхронний приймач може бути настроєний для використання в режимі 9-бит даних, що робить можливою адресну прийомопередачу в багатоточковому підключенні на основі RS-485 апаратного протоколу.
8051-сумісні мікроконтролери зазвичай мають один або два УАПП (UART), два або три, 128 або 256 байт вбудованою ОЗУ (16 байт якої мають побітову адресацію), від 512 байт до 128 Кбайт вбудованої пам'яті програм (ПЗУ), і іноді зустрічається використання, що адресується через «регістри спеціального призначення» (SFR - special function register). Один машинний цикл оригінального 8051 ядра займає 12 тимчасових тактів, а більшість інструкцій виконуються за один або два машинні цикли. Причасті тактового генератора, рівною 12, 8051 ядро може виконувати 1 мільйон операцій в секунду, що виконуються за один цикл, або 500 тисяч операцій в секунду, що виконуються за два цикли. Покращене 8051-сумісне ядро, яке в даний час поширене, виконує машинний цикл за шість, чотири, два, або навіть за один часовий такт, і дозволяє використовувати тактові генератори з частотою до 100 Мгц, що дозволило збільшити кількість виконуваних операцій в секунду. Все 8051 сумісні пристрої, вироблювані SILabs, деякі з вироблюваних Dallas і небагато з вироблюваних Atmel мають ядро з 1 тактом на машинний цикл.
Загальною особливістю в сучасних 8051-сумісних мікроконтролерів стало вбудовування покращених і додаткових схем, таких як: автоскидання по падінню живлячої напруги; вбудовані тактові генератори; внутрішньосхемне програмування пам'яті програм; автозавантажувачі, довготривалій пам'яті даних на основі EEPROM; I²C (стандарт 3-х дротяної послідовної шини); SPI; USB хост інтерфейс; ШИМ-генератори; аналогових компараторів; АЦП і ЦАП конверторів; годинника реального часу; додаткових таймерів і лічильників; внутрішньосхемних відладчиків, додаткових джерел переривань; розширених енергозбережних режимів.