

1 Теоретическая часть
1.1 Цифровой фильтр
1.1.1 Для корректной работы прибор необходимо защищать от различных внешних воздействий и электромагнитных помех. Для этой цели рекомендуется использовать помехоподавляющий фильтр в цепи питания ТРМ101, а в цепи управления параллельно выходным коммутирующим контактам установить искрогасящие элементы, например RC-цепочку. Кроме аппаратной защиты существует возможность использовать программный цифровой фильтр низких частот. Цифровой фильтр подавляет помехи двух видов.
1.1.2 Во-первых, фильтр устраняет сильные единичные помехи (рис. 1).
Если измеренное значение Ti отличается от предыдущего Ti–1 на величину, большую, чем значение параметра Fв (заданная «полоса фильтра»), то прибор присваивает ему значение равное Ti–1 + Fв (рис. 1).Таким образом характеристика сглаживается. Как видно из рис. 1, малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при низком уровне помех или при работе с быстроменяющимися процессами рекомендуется увеличить значение полосы фильтра или отключить действие этого параметра. При работе в условиях сильных помех для устранения их влияния на работу прибора необходимо уменьшить значение в параметре «полоса фильтра».
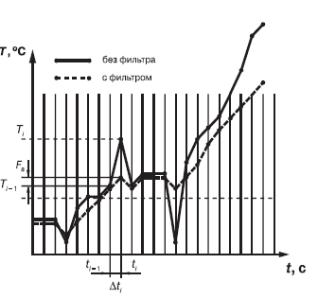
Рис. 10. Цифровой фильтр.
1.1.3 Во-вторых, фильтр устраняет шумовые составляющие сигнала, осуществляя его экспоненциальное сглаживание. Основной характеристикой экспоненциального фильтра является постоянная времени τф –интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения Ti (рис. 10).
1.1.4 При больших значениях τф фильтр вносит значительное запаздывание, но шумы заметно подавлены (кривая II на рис. 10). При τф близких к нулю фильтр довольно точно отслеживает изменения входного сигнала, но уровень шума практически не уменьшается (кривая I на рис. 10). При установке оптимальных значений параметров фильтра задержка сигнала, вносимая фильтром, не будет оказывать отрицательного влияния на процесс регулирования, при этом сохранится эффективность подавления помех.
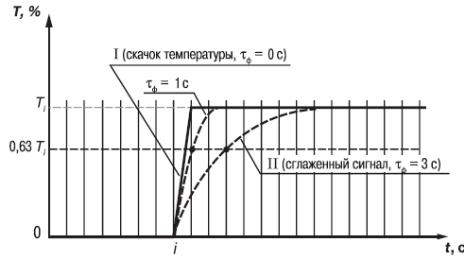
Рис. 11. Реакция фильтра на единичное ступенчатое воздецствие.
1.1.5 Установка параметров цифрового фильтра
Работа цифрового фильтра описана выше.
1.1.5.1
Настройка цифрового фильтра измерений
производится путем установки двух
параметров
![]() – полоса цифрового фильтра и
– полоса цифрового фильтра и
![]() –
постоянная времени цифрового фильтра.
Оптимальное значение постоянной времени
цифрового фильтра
определяется
при проведении автонастройки.
–
постоянная времени цифрового фильтра.
Оптимальное значение постоянной времени
цифрового фильтра
определяется
при проведении автонастройки.
1.1.5.2 Значение допускается устанавливать в диапазоне 0...999 с, при = 0
фильтрация методом экспоненциального сглаживания отсутствует. Значение устанавливается в диапазоне 0...999,9 оС/с для температурных датчиков (ТСП, ТСМ и термопар), 0...9999 – для аналоговых. При = 0 «ограничитель единичных помех» выключен.
1.1.6.2.3.
В результате автонастройки прибор
вычисляет оптимальные значения
коэффициентов ПИД регулятора (Xp,
τи, τд) для данной системы. Кроме того
происходит определение постоянной
времени входного сглаживающего фильтра
τф периода следования управляющих
импульсов Тсл
и рекомендуемое значение параметра
![]() .
.
1.1.6.2.4.
После окончания автонастройки светодиод
![]() гаснет,
прибор автоматически переходит в режим
РАБОТА. При сбое в процессе автонастройки
ее выполнение сразу прекращается,
светодиод
мигает.
Поэтому при выполнении автонастройки
особое внимание надо уделить защите
прибора от различных внешних воздействий
и электромагнитных помех и устранить
нежелательные внешние возмущения на
объекте регулирования.
гаснет,
прибор автоматически переходит в режим
РАБОТА. При сбое в процессе автонастройки
ее выполнение сразу прекращается,
светодиод
мигает.
Поэтому при выполнении автонастройки
особое внимание надо уделить защите
прибора от различных внешних воздействий
и электромагнитных помех и устранить
нежелательные внешние возмущения на
объекте регулирования.