

Назначение, устройство и работа составных частей лтпс. Блок электроники (Блок 11с1/02).
Блок электроники предназначен для:
- управления рабочими режимами функциональных блоков станции подсвета по командам с пульта и БЦВМ,
управления разворотом гиростабилизатора по сигналам из БЦВМ, МУП или коррелятора,
управления находящимися в блоке визирования диафрагмой, призмой и зеркалом.
электрического арретирования гиростабилизатора.
Для выполнения этих функций в блоке электроники имеется:
блок команд,
усилители следящих приводов блока визирования,
блок управления гиростабилизатором.
В блоке команд размещены устройства, вырабатывающие команды. Структурная схема блока управления гиростабилизатором показана на рисунке 10. В нём приняты следующие сокращения:
ПУ – пороговое устройство,
КЗ – корректирующее звено,
- суммирующий усилитель,
ФЧВ – фазочувствительный выпрямитель,
АИМ – амплитудно-импульсный модулятор,
ШИМ – широтно-импульсный модулятор,
УМ – усилитель мощности,
У – усилитель,
МД – моментный датчик,
Uвх кнюп. – сигнал с кнюппеля МУП,
Uвх БЦВМ. – сигнал с БЦВМ,
Uвх корр.. – сигнал с коррелятора,
Uвх арр. – сигнал с датчика арретира,
Uвх юст. – сигнал с датчика контрольно-проверочной аппаратуры (сигнал юстировки).
При поступлении команд “Автономно”, “Коррелятор” и т.д. срабатывают соответствующие коммутационные устройства, которые производят необходимые включения, отключения и переключения. Сигнал управления с кнюппеля МУП Uвх кнюп подаётся на суммирующий усилитель по команде “Порог”, которая выдаётся пороговым устройством (ПУ). Порог срабатывания ПУ устанавливается в пределах 0,5 – 0,6 В.При наведении визирной линии на цель (подана команда “Разар. СП”) сигналы управления от МУП, БЦВМ и коррелятора проходят через усилительно-преобразовательные устройства (, ФЧВ и т.д.) и поступают на моментные датчики (МД) гиростабилизатора. При отсутствии команды “Разар. СП” гиростабилизатор арретируется по сигналам Uвх арр. или Uвх юст. (при юстировке).
Гиростабилизатор гс-11с.
Гиростабилизатор (ГС) предназначен:
для управления угловым положением визирной линии ЛТПС,
для стабилизации в пространстве заданного положения визирной линии при угловых колебаниях самолёта вокруг осей y1 и z1 системы координат, связанной с самолётом.
Он состоит из двух блоков – гироскопического и электронного, вмонтированных в один корпус. Гироскопический блок представляет собой двухстепенную силовую гироплатформу в кардановом подвесе (рис.11).

Усилитель разгрузки

СКТ-232Д СКТД-6465Д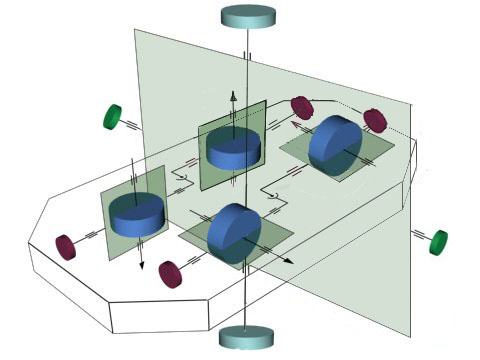
![]()

ДУ

ДМ
![]()

МД
МД

СКТ-232Д СКТД-6465Д
ДУ
ДМ
![]()

Усилитель разгрузки
![]()

Рис.11. Гиростабилизатор.
Ось вращения карданной рамки 1 направлена по оси Oz. В карданной рамке закреплена ось вращения гироплатформы 2, направленная по оси Oy. На каждой из осей установлены роторы датчика момента (ДМ) и синусно-косинусных трансформаторов СКТ-232Д и СКТД-6465Д. На гироплатформе установлены два одинаковых гироузла. Каждый гироузел, состоит из двух связанных между собой при помощи спарников двухстепенных гироскопов, моментного датчика (МД), датчика угла прецессии (ДУ) и датчика момента (ДМ). За счёт спарника кинетический момент гироузла равен удвоенному кинетическому моменту гироскопа.
В электронном блоке установлены усилители разгрузки системы силовой стабилизации.
Функционально в гиростабилизаторе можно выделить три системы:
систему силовой стабилизации,
систему управления угловым положением гироплатформы,
систему выдачи сигналов об угловом положении платформы.
Система силовой стабилизации предназначена для компенсации возмущающих моментов, действующих по осям подвеса гироплатформы. В систему стабилизации по каждой из осей входят гироузел, датчик угла прецессии (ДУ), усилитель разгрузки (У) и датчик момента (ДМ). Структурная схема системы стабилизации приведена на
рисунке 12.
![]()
![]()




![]()
![]()
![]()

















![]()
![]()



Рис. 12. Структурная схема одного канала стабилизации.
При действии
на гироплатформу возмущающего момента
![]() начинают прецессировать гироскопы
гироузла, имеющие направление кинетических
моментов перпендикулярное оси,
относительно которой действует момент
начинают прецессировать гироскопы
гироузла, имеющие направление кинетических
моментов перпендикулярное оси,
относительно которой действует момент
![]() .
Осями прецессии в этом случае являются
оси, связанные спарниками, т.е. со
скоростью прецессии
.
Осями прецессии в этом случае являются
оси, связанные спарниками, т.е. со
скоростью прецессии
![]() вращаются рамки указанных гироскопов.
вращаются рамки указанных гироскопов.
При прецессионном
движении гироскопов появляется суммарный
гироскопический момент
![]() ,
который воздействует на платформу
противоположно моменту
,
препятствуя её повороту. Прецессионное
вращение гироскопов передаётся на ротор
датчика угла прецессии (ДУ); ДУ выдаёт
сигнал
,
который воздействует на платформу
противоположно моменту
,
препятствуя её повороту. Прецессионное
вращение гироскопов передаётся на ротор
датчика угла прецессии (ДУ); ДУ выдаёт
сигнал
![]() ,
пропорциональный углу поворота ротора
,
пропорциональный углу поворота ротора
![]() .
Сигнал
,
усиленный усилителем разгрузки,
поступает на датчик момента (ДМ), который
создаёт стабилизирующий момент,
действующий на платформу противоположно
моменту
.
При
.
Сигнал
,
усиленный усилителем разгрузки,
поступает на датчик момента (ДМ), который
создаёт стабилизирующий момент,
действующий на платформу противоположно
моменту
.
При
![]() прецессия прекращается. При прекращении
действия момента
гироскопы возвращаются в исходное
состояние под действием момента
прецессия прекращается. При прекращении
действия момента
гироскопы возвращаются в исходное
состояние под действием момента
![]() .
.
Система управления угловым положением гироплатформы предназначена для поворота гироплатформы по сигналам, поступающим из блока электроники и имеет два канала, каждый из которых состоит из гироузла и моментного датчика (МД).
При подаче сигнала на МД он создаёт момент, действующий на гироскопы гироузла. Гироскопы начинают прецессировать вместе с платформой вокруг одной из её осей. При этом платформа поворачивается вокруг той оси, которая перпендикулярна кинетическим моментам гироскопов, на которые действует момент, создаваемый МД.
Систему выдачи сигналов об угловом положении платформы образуют трансформаторы, установленные на осях вращения гироплатформы.СКТД-6465Д выдают сигналы в БЦВМ, а СКТ-232Д входят в состав следящих приводов для передачи углов поворота гироплатформы в блок визирования.