

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«КАМСКАЯ ГОСУДАРСТВЕННАЯ ИНЖЕНЕРНО-ЭКОНОМИЧЕСКАЯ АКАДЕМИЯ»
Расчет перегружающих устройств для передачи объектов
Методические указания к расчетно-практической работе по дисциплине «Подъемно-транспортные установки»
Набережные Челны
2008 г.
УДК
Печатается по решению научно-методического совета Камской государственной инженерно-экономической академии.
Расчет перегружающих устройств для передачи объектов: Методическое указание к расчетно-практической работе. /Составители Галиакбаров А.Т., Хабибуллин С.С. – Набережные Челны: ИНЭКА, 2008. – 23 с.
Методические указания предназначены студентам специальности 260601 «Машины и аппараты пищевых производств» для выполнения расчетно-практической работы по дисциплине «Подъемно-транспортные установки».
Ил.: 2. Библиогр. 3 назв.
Рецензент: к.т.н., доцент Талипова И.П.
Камская государственная
инженерно-экономическая академия
2008 г.
Цель работы: ознакомление с основными устройствами транспортирующих систем, методикой и выполнением расчета перегружающих устройств для продольной передачи объектов.
***
В состав транспортирующих систем поточных линий кондитерской промышленности входят различного рода вспомогательные устройства: перегружатели, отсекатели, сталкиватели, отдельные виды механизмов приводов и т. д. Решение задач кинематического расчета транспортирующих систем требует условий кинематических и конструктивных параметров вспомогательных устройств, входящих в системы. Перегружающие устройства подразделяются на [1]:
1. Устройства для продольной передачи объектов, которые, в свою очередь, подразделяются на:
- Переходы между двумя транспортерами, находящимися на одном уровне. Применяются при передаче жестких объектов с одного транспортера на другой в горизонтальной плоскости если необходимо сохранение их горизонтального положения во время перехода через зону стыка транспортеров (рис. 1, а).
- Переходы между транспортерами, находящимися на разных уровнях. Применяются в тех случаях, когда легко изгибающиеся объекты, а также объекты, склонные к прилипанию могут быть затянуты лентами в пролет между барабанами, явление наиболее возможно, если толщина объекта близка к длине пролета. При этом транспортеры, расположены на разных уровнях с наклонной переходной пластиной 3 (рис. 1, ж), которая способствует плавному переходу объекта с ленты 1 на ленту 2.
- Перекладывающие каретки. Применяются в транспортирующих системах, предназначенных для укладки объектов на приспособления - спутники.
- Отсекатели. Используются: при переходе объектов с транспортера на транспортер когда вследствие непостоянства коэффициентов трения нарушается постоянство шага распределения объектов в качестве устройств для выравнивания шага, в качестве синхронизаторов движения объектов при переходе с одного транспортера на другой, если транспортеры имеют индивидуальные приводы, как механизмы для перегруппировки объектов. Отсекатели приводятся в движение обычно кривошипно-ползунными или кулачковыми механизмами.
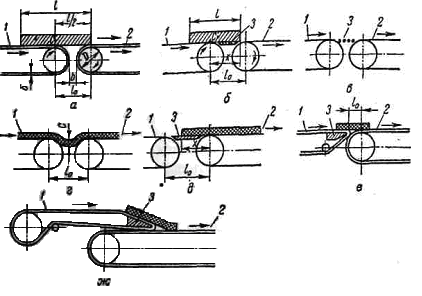
Рис.1.
Виды переходов между двумя транспортерами:
а и г — непосредственный переход объектов; б и д — переход в в виде мостика: в — переход в виде рольганга; е — непосредственный переход с уменьшенным пролетом; ж — переход между транспортерами, расположенными на разных уровнях; 1 и 2 — транспортеры; 3 — перегружающее устройство.
- Ротационные перегружатели. Применяется для передачи объектов с одного транспортера на другой с одновременной их перегруппировкой. К этому же виду перегружателей можно отнести и дисковый перегружатель при соосном расположении транспортеров.
2. Перегружающие устройства для поперечной передачи объектов:
- Перегружающие устройства в виде цепных грузоведущих транспортеров. Применяются для передачи жестких объектов или приспособлений-спутников под углом 90°.
Условием четкой работы таких устройств является синхронность работы транспортеров.
Сталкиватели. Применяются обычно для передачи объектов в горизонтальной плоскости под углом 90°.
Полочные и люлечные перегружатели. Применяются для перегрузки объектов в вертикальном направлении.
Дисковые перегружатели и поворотные секторные транспортеры. Их устройство известно и особых пояснений не требует. При создании таких устройств радиусы дисков обычно выбираются по конструктивным соображениям. Однако выбирать их произвольно не следует.
Рассмотрим случай передачи объекта с одного транспортера на другой при их соединении с использованием перегружающего устройства, выполненного в виде перехода.
Оба транспортера находятся на одном уровне (рис. 1, а).
При передаче жестких объектов необходимо их строгое горизонтальное расположение, что может быть достигнуто (при расположении центра массы объекта в середине и ее равномерном распределении), если будет соблюдаться условие:
![]() (1)
(1)
где l0–межцентровое расстояние между барабанами двух транспортеров; l – длина объекта. Причем,
![]() (2)
(2)
тогда формула приобретает вид:
![]() (3)
(3)
Таким образом, диаметр барабана должен удовлетворять условию:
![]() (4)
(4)
где D – диаметр барабанов, мм; δ – толщина транспортерной ленты, мм; b – конструктивный зазор, мм; l – длина объекта, мм.
Но так как D зависит также от выбранного типа ленты и ее толщины, то данное условие не всегда может быть соблюдено. В том случае в пролете между барабанами устанавливаются или неподвижные площади (мостики), или роликовые транспортеры (рольганги).
Рассмотрим случай установки в пролете между барабанами транспортеров мостика (рис. 1, б). Длина мостика произвольно выбираться не может. Во-первых, его длина, которую мы условно можем принять равной пролету l0, не должна превышать длины объекта l; во-вторых, его длина должна выбираться с учетом сопротивления, которое он оказывает движению объекта, а также ряда других факторов. Действительно, движущей силой перемещения объекта по поверхности мостика является сила трения Т1 объекта о ленту первого транспортера. Если длина мостика достаточно велика, то сила трения Т1 может стать меньше предельного значения силы трения То объекта о поверхность мостика и тогда объект остановится.
Соотношение сил трения объекта о ленты обоих транспортеров и поверхность мостика зависит от соотношения соответствующих коэффициентов трения и положения объекта. Если положение объекта оценивать расстоянием х, пройденным правым концом объекта (рис. 2) от конца 1-го транспортера, то можно выделить три основных случая положения объекта:
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
При составлении уравнения движения объекта для каждого из этих случаев полагаем, что массы объекта распределены равномерно и что центр тяжести находится в середине объекта.
а) Движение объекта на первом участке при 0 < х < 1о. Уравнение движения в этом случае запишется в виде:
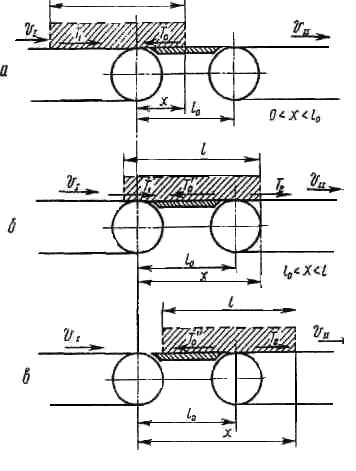
Рис. 2.
К определению закона движения объекта при переходе
через мостик
![]() (8)
(8)
или
![]() (9)
(9)
Проводя необходимые преобразования, получим
![]() (10)
(10)
Последнее уравнение, является простейшим линейным однородным дифференциальным уравнением с постоянными коэффициентами. Его решение определяется суммой общего решения соответствующего однородного уравнения и любого частного решения неоднородного уравнения.
Воспользуемся непосредственно исходным уравнением (10), записав его в форме
![]() (11)
(11)
или
![]() (12)
(12)
и
![]() (13)
(13)
Интегрируя по х, получим
![]() (14)
(14)
где
![]() и
и
![]() (15)
(15)
После интегрирования и подстановки найдем закон изменения скорости объекта на первом участке
![]() (16)
(16)
Скорость объекта в конце первого участка при х = l0 , таким образом, составит
![]() (17)
(17)
Полагая в (16) ν1 = 0 и решая соответствующее квадратное уравнение, получим значение х1 =Xi (f0,f1,l,vl), при котором объект может остановиться на мостике. Отсюда вытекает следующее конструктивное ограничение, связывающее возможную длину мостика с коэффициентами трения, длиной объекта и скоростью:
![]() (18)
(18)
где Xi – наименьший положительный корень.
б) Движение объекта на втором участке при l0 < х < l
В этом случае объект опирается одновременно на область транспортера и мостик и, следовательно, задача становится практически неопределимой. Если пренебречь поперечной жесткостью объекта, то можно сделать допущение, что нормальная реакция каждой из опор пропорциональна длине участка, на котором происходит касание с этой опорой.
Уравнение движения объекта для этого случая будет
![]() (19)
(19)
Проводя необходимые преобразования, получим
![]() (20)
(20)
Аналогично (16) определим скорость объекта на втором
![]() (21)
(21)
Полагая в (21) х = l, получим значение конечной скорости объекта на втором участке в момент перехода со второго участка на третий
![]() (22)
(22)
Желая определить,
при каком положении (при каком значении
х)
объекта
его скорость станет равной скорости
2-го транспортера,
положим в (21) и решим квадратное уравнение
относительно
х.
Учитывая, что
![]() в
результате получим
в
результате получим
![]() (23)
(23)
Если параметры правой части последнего уравнения заданы, то после нахождения хII необходимо проверить выполнение неравенства l0 < хII < (l0+l) В случае его невыполнения необходимо перейти к анализу движения объекта на третьем участке.
в) Движение объекта на третьем участке при l < х < (l + l0)
Уравнение движения объекта в данном случае имеет вид:
![]() (24)
(24)
+,
если
![]() ;
-, если
;
-, если
![]()
или
![]() (25)
(25)
Значение скорости объекта на третьем участке получим аналогично (16)
![]() (26)
(26)
Полагая v3 = vII и решая соответствующее квадратное уравнение относительно х, получим, учитывая значение v2(k) из предыдущего, значение хIII, при котором объект приобретет скорость 2-го транспортера:
![]() (27)
(27)
После нахождения следует проверить выполнение неравенства l< хIII < (l + l0)
Если оно не выполняется, это означает, что при выбранных значениях параметров и будет происходить проскальзывание объекта. В таком случае необходимо варьирование этих параметров.
Для уменьшения сил сопротивления можно использовать не приводной роликовый транспортер - рольганг (рис.1, в), длина которого должна быть меньше длины объекта. Если пролет l0 равен или превышает длину объекта, то может быть установлен приводной рольганг. Шаг расположения роликов должен быть не менее l/2. Можно рекомендовать применять шаг расстановки роликов в пределах S = (0,35—0,4) l.
При передаче с транспортера на транспортер нежестких объектов типа тестовых лент, жгутов карамельной массы и т. п. материалов следует принимать во внимание их возможное провисание в пролете между барабанами (рис. 1, г). Если рассматривать жгут или ленту как гибкую нить, нагруженную собственным весом, то уравнение ее прочности на растяжение будет иметь вид:
 (28)
(28)
где l0 — длина пролета; γ — удельный вес транспортируемого материала; с — стрела провисания жгута; [σp] — допускаемое напряжение на растяжение.
Задаваясь допустимой величиной стрелы провисания отсюда можно найти условие для определения допускаемого пролета (или межцентрового расстояния между барабанами)
![]() (29)
(29)
Если по конструктивным соображениям пролет необходимой длины осуществить невозможно, то устанавливают nepexодные мостики (рис.1, д). Однако и в этом случае длину мостика нельзя выбирать произвольно. Допустим, что жгут перешел 2-й транспортер, но его конец длиной х находится еще на мостике. Очевидно, при таком положении жгут будет растягиваться силой трения То, возникающей между ним и поверхностью мостика.
при этом
![]() (30)
(30)
где q — вес единицы длины объекта.
Тогда в его сечении возникнет растягивающее напряжение, которое определится по уравнению
![]() (31)
(31)
где T
- сила трения; F
- площадь
поперечного сечения объекта; h
- высота
объекта; W
- момент
сопротивления сечения объекта;
![]() - предел
текучести материала объекта.
- предел
текучести материала объекта.
Если считать, что наибольшая сила трения будет при х= то из последнего уравнения найдем условия, определяющие возможную длину мостика:
![]() (32)
(32)
для объектов прямоугольного сечения
![]() (33)
(33)
Если нежесткие объекты имеют небольшую длину, то использование переходного мостика не всегда возможно. В таких случаях при тонких транспортерных лентах вместо барабанов применяются направляющие пластины - «ножи» - с малым радиусом закругления их краев (см. рис. 1, е). Такое устройство позволяет в значительной мере уменьшить величину пролета l0.