

1.3 Синтез керуючого пристрою на основі схемної логіки
1.3.1 Побудова схеми алгоритму роботи керуючого пристрою
Функціонування керуючого пристрою може бути описане в словесній формі та у формі алгоритму.
При умовному записі(словесному) кожному керуючому сигналу у1, у2….у7 відповідає певна мікрооперація, а ознаки Х1 та Х2 формуються в операційному пристрої. Мікрооперації визначають усі операції, що виконуються у регістрах та блоках операційного пристрою. Робота керуючого пристрою передбачає перевірку ознак, сформованих операційним пристроєм .
Зручніше, звичайно, представити функціонування керуючого пристрою у вигляді алгоритму, який відображає послідовність переходів керуючого пристрою з попереднього положення в наступне і формування відповідних керуючих сигналів. Кожний керуючий сигнал викликає елементарну дію - мікрооперацію.
Алгоритм функціонування керуючого пристрою може бути представлений у вигляді алгоритму мікрооперацій (рисунок 1.2) або алгоритму мікрокоманд(рисунок 1.3), в якому прямокутник відповідає операторному блокові, а ромб- умовному.
У завданні на курсову роботу подано алгоритм функціонування керуючого пристрою у вигляді алгоритму мікрокоманд.
Як правило, деякі мікрооперації можуть виконуватися одночасно. Такі групи мікрооперацій об’єднуються в мікрокоманди. Для формування мікрокоманд необхідно визначити, які мікрооперації можуть виконуватися одночасно(в одні і ті ж тактові періоди).
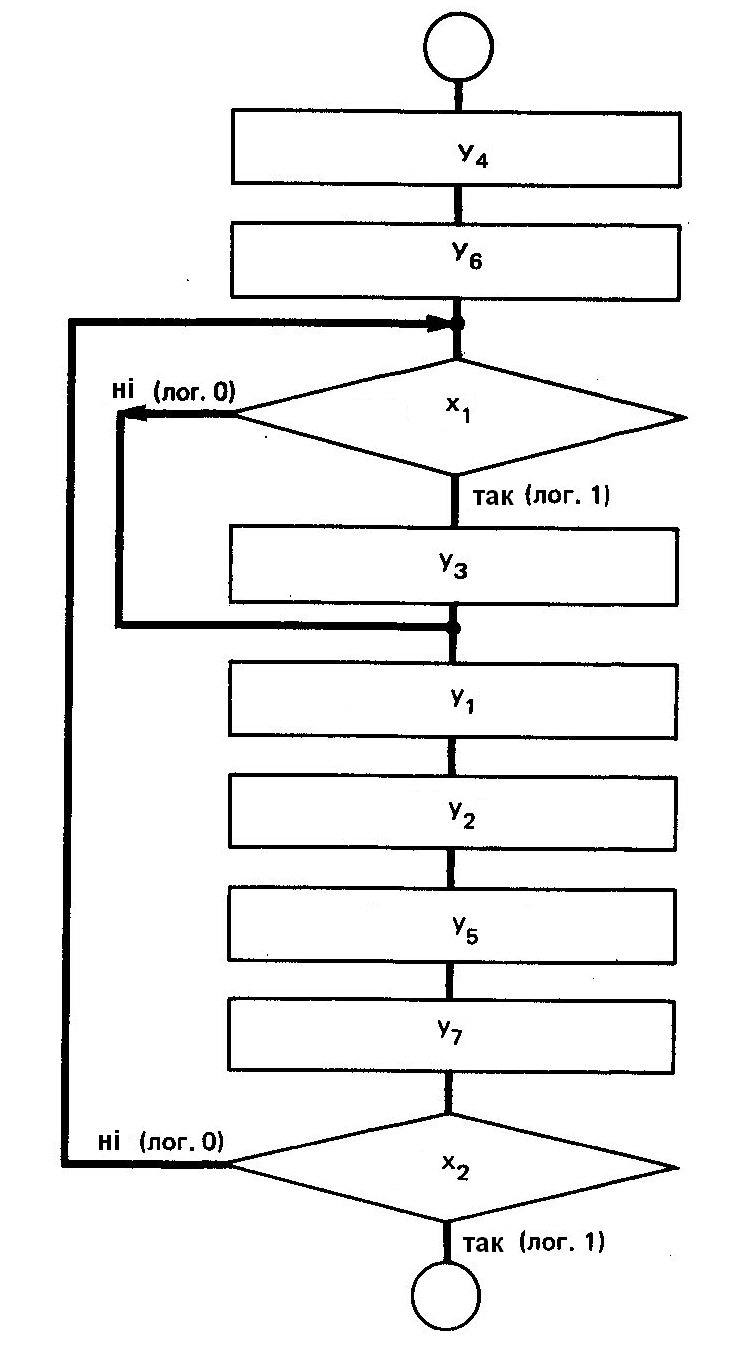
Рисунок 1.2 - Алгоритм функціонування
керуючого пристрою в мікроопераціях
Очевидно, мікрооперації У4 , У6 можуть бути об’єднані в одну загальну мікрокоманду У1; мікрооперація У3 не може бути об’єднаною з будь - якими іншими мікроопераціями і, відповідно, вона буде мікрокомандою У2 ; мікрооперації У1 , У2, У5, У7 можна виконувати також об’єднати в мікрокоманду У3. Приклад алгоритму у мікрокомандах показано на рисунку 1.3.
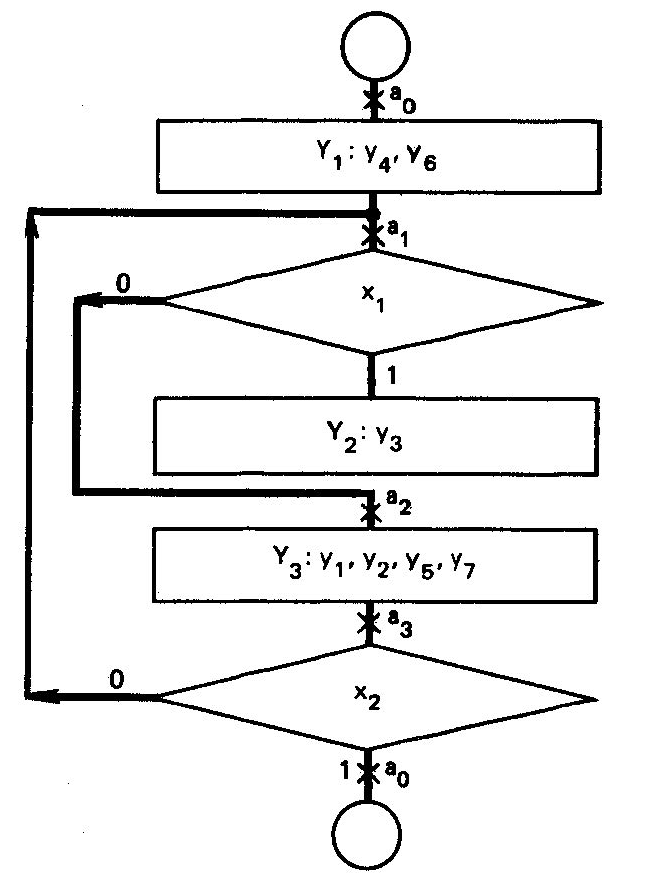
Рисунок 1.3- Алгоритм функціонування керуючого пристрою в мікрокомандах
1.3.2 Побудова графа функціонування керуючого пристрою
Керуючий пристрій є логічним
пристроєм послідовного типу. Мікрокоманда,
яка видається в наступному тактовому
періоді, залежить від того, яка
мікрокоманда видається в біжучому
тактовому періоді, тобто, від стану, в
якому знаходиться пристрій. Для визначення
станів пристрою проводиться розбивка
схеми алгоритму, тобто визначається
кількість положень керуючого пристрою
(положення відмічається після операторного
блоку). З рисунку 1.3 видно, що синтезований
керуючий пристрій має чотири положення:
а0,
а1,
а2,
а3
. У вершинах графа
вказуються всі
положення керуючого
пристрою..
Вершини з’єднуються
гілками, над якими вказують сигнали-умови,
які викликають перехід в наступний
стан, і керуючі сигнали, які формуються
в даному положенні. Робота керуючого
пристрою починається з початкового
положення а0.
В це положення
повертається керуючий пристрій в кінці
алгоритму. Для забезпечення заданої
кількості положень в склад керуючого
пристрою включають схему регістру
стану, який складається з тригерів.
Кількість тригерів визначається з
умови 2к
![]() N,
де к- кількість тригерів, N-
кількість положень керуючого пристрою.
Граф переходів керуючого пристрою
показано на рисунку 1.4
N,
де к- кількість тригерів, N-
кількість положень керуючого пристрою.
Граф переходів керуючого пристрою
показано на рисунку 1.4

Рисунок 1.4 – Граф переходів
керуючого пристрою