

Описание лабораторной установки
Устройство и принцип действия контакторов можно изучить с помощью стенда, расположенного в учебной лаборатории.
Для испытаний аппаратуры на стенде следует собрать схемы приведенные на рис. 6, 7, 8.
Все схемы собираются при отключенном напряжении питания и с соблюдением правил техники безопасности.
После сборки каждая схема представляется преподавателю.
Порядок выполнения работы
Исследование контакторов переменного и постоянного тока
1. Ознакомиться с устройством, принципом действия контактора и взаимодействием его отдельных частей. Начертить схему контактора.
2. Собрать схему проверки напряжения втягивания и отпадения контакторов (рис. 12 а, б). Определить напряжение втягивания и отпадения контакторов с помощью автотрансформатора Т, измеряя его вольтметрами PV1 и PV2.
3. Рассчитать коэффициент возврата по формуле
 ,
,
где Uотп – напряжение отпадения; Uвтяг – напряжение втягивания.
4. Измерить ток, потребляемый втягивающей катушкой. Для этого используются схемы предыдущего испытания. Замеры производятся при номинальном напряжении.
5. Измерить собственное время включения и отключения контакторов. Для этого собрать схемы 13а, 14а или 13б, 14б. Опыт для каждой схемы повторяют 3 раза и находят среднее значение tвкл и tоткл.
6. Снять характеристики tвкл=f(U). Для снятия характеристик tвкл=f(U) используют схемы 13а и 14а. При помощи ЛАТРа подавать на катушки различное напряжение, замеряя каждый раз время срабатывания контактора.

а)

б)
Рис. 12. Схемы для определения коэффициента возврата контакторов:
а – для контактора переменного тока; б – для контактора постоянного тока

а)

б)
Рис. 13. Схемы для определения времени включения контакторов:
а – для контактора переменного тока; б – для контактора постоянного тока

а)

б)
Рис. 14. Схемы для определения времени отключения контакторов:
а – для контактора переменного тока; б – для контактора постоянного тока
Контрольные вопросы
1. Каково назначение контактора?
2. Как осуществляется управление контактором?
3. Как гасится дуга в испытуемом контакторе?
4. Технические характеристики?
Лабораторная работа № 3 Исследование магнитного пускателя
Цель работы: ознакомиться с устройством, принципом действия, конструктивными элементами и схемами соединений магнитного пускателя. Изучить методы испытаний и наладки магнитных пускателей.
Общие сведения
Пускатель - это коммутационный аппарат, предназначенный для пуска останова и защиты электродвигателей от перегрузки с помощью тепловых реле и от снижения напряжения до 0,5–0,6Uн.
Магнитные пускатели состоят из трехполюсного электромагнитного контактора и встроенных тепловых реле. Для защиты электродвигателя от токов короткого замыкания последовательно с магнитным пускателем в цепь устанавливаются предохранители или автоматические выключатели.
Магнитные пускатели применяются для управления электродвигателями переменного тока напряжением до 660 В, мощностью до 75 кВт.
Пускатели могут быть реверсивными и нереверсивными, в открытом, защищенном и пыле- брызгонепроницаемом исполнении, с тепловыми реле и без них.
Электрическая и конструктивная схема магнитного пускателя серии ПАЕ показана на рис.15. При нажатии кнопки SB1 подается питание в катушку контактора КМ(5) через размыкающиеся контакты тепловых реле KST1, KST2 и кнопку SB2. Якорь электромагнита 6 притягивается к сердечнику 4, вращаясь вокруг оси O1. При этом неподвижные контакты 2 замыкаются подвижным контактным мостиком 8. Нажатие в контактах обеспечивается пружиной 9. Одновременно замыкаются вспомогательные контакты SQ (рис. 9,а), которые шунтируют кнопку SB1. При перегрузке электродвигателя срабатывают оба или одно тепловое реле 11, цепь катушки размыкается контактами KST1 и KST2. При этом якорь 6 больше не удерживается сердечником и под действием собственной массы и пружины 7 подвижная система переходит в отключенное положение, размыкая контакты. Двукратный разрыв в каждой фазе и закрытая камера 10 обеспечивают гашение дуги без специальных устройств. Точно так же происходит отключение пускателя при нажатии кнопки SB2.
Амортизирующая пружина 3 предохраняет подвижную часть от резких ударов при включении. Все детали пускателя крепятся на металлическом основании 1.
Для защиты электродвигателя от КЗ в цепь включены предохранители (F). Магнитный пускатель защищает двигатель от перегрузки с помощью тепловых реле и отключает его при снижении напряжений до 0,5–0,6Uн.

Рис. 15. Электрическая схема магнитного пускателя серии ПАЕ
а – электрическая схема; б – конструктивная схема
Тепловые реле состоят из биметаллической пластины, изготовленной из сплавов имеющих разные коэффициенты линейного расширения. При перегрузке электродвигателя большой ток, протекающий через тепловые реле, нагревает биметаллическую пластину, она изгибается, размыкая цепь катушки пускателя.
Для защиты электродвигателя от частых включений в магнитном пускателе может быть предусмотрено реле времени, рис. 5.6.
Современные магнитные пускатели представляют собой модульную структуру (рис. 16), которая позволяет создать, различные схемы включения использую дополнительные модули контактов и использовать различные виды защиты от перегрузок, перенапряжений и частых включений.
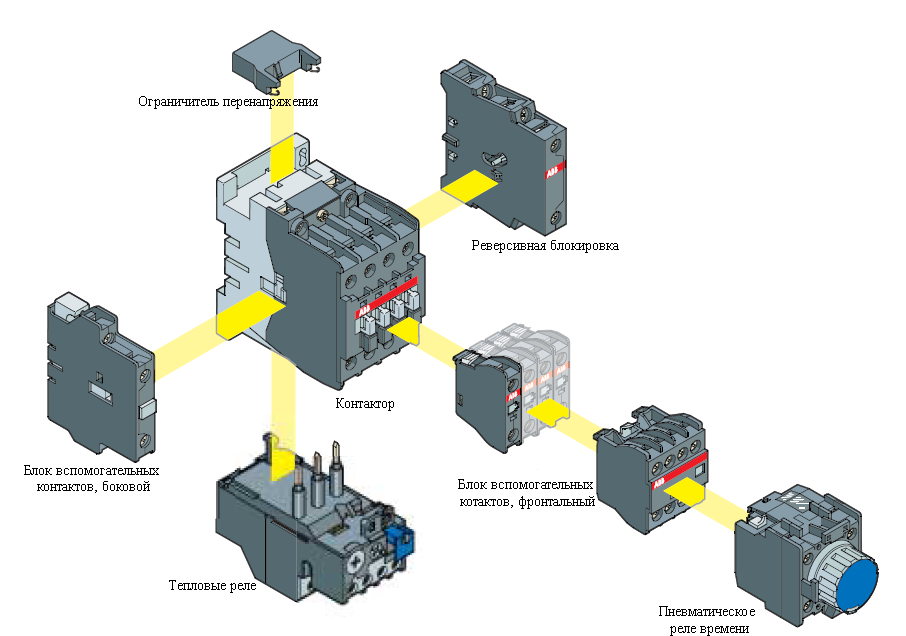
Рис. 16. Модульная конструкция современных магнитных пускателей
Низковольтные вакуумные контакторы предназначены для коммутации электрических цепей переменного трехфазного тока промышленной частоты 50 Гц, с номинальным напряжением до 1140 В при работе в нормальных условиях и при перегрузках.
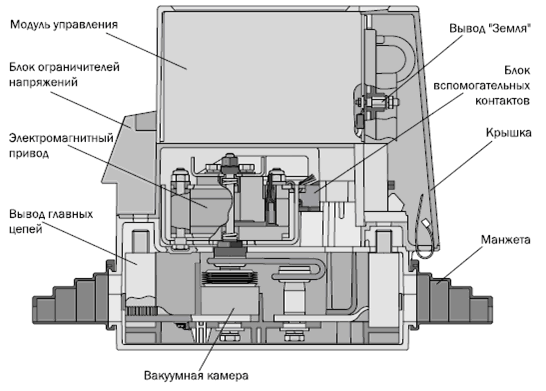
Рис. 17. Низковольтный вакуумный контактор LSM/TEL
На рис 17. представлен низковольтный вакуумный контактор LSM/TEL. Контактор объединяет в себе коммутационный модуль и блок управления. Якорь электромагнитного привода жестко соединен со швеллером, который перемещает тяговые изоляторы. Перемещение подвижных контактов вакуумных камер осуществляется тяговыми изоляторами в осевом направлении. Это обеспечивает строго линейное перемещение в обоих направлениях и позволяет обходиться без вращающихся валов, опор и угловых рычагов.
Встроенный модуль управления обеспечивает операции включения и отключения, а также удержание контактов в замкнутом состоянии.
Коммутационный модуль состоит из субмодуля главной цепи и электромагнитного привода. Субмодуль главной цепи объединяет:
• вакуумные дугогасительные камеры;
• выводы главной цепи;
• гибкие шины, соединяющие подвижные контакты вакуумных камер с выводами главной цепи;
• зажимы, позволяющие подключать кабели к выводам главной цепи.
Электромагнитный привод приводит в движение подвижные контакты вакуумных камер посредством тяговых изоляторов и фиксируется в двух устойчивых положениях:
• в разомкнутом состоянии "ОТКЛЮЧЕН" якорь фиксируется пружинами отключения;
• в замкнутом состоянии "ВКЛЮЧЕН" якорь фиксируется током удержания, протекающим в катушке электромагнитного привода.
Электромагнитный привод имеет датчик положения главных контактов и кронштейны, управляющие блоками вспомогательных контактов.
Контактор типа КВТ – 1,14 (рис. 18) состоит из следующих основных узлов: 1 – корпус; 2 – камеры дугогасительные вакуумные; 3 – рычаг; 5 – электромагнит; 7 – верхние тоководы; 14 – нижние тоководы; 16 – крепежные скобы; 23 – панель управления; 20 – блоки вспомогательных контактов (далее БВК).
Контактор осуществляет операции включения и отключения приёмников электрической энергии в режимах нормальных и редких коммутаций.
Каждая вакуумная дугoгасительная камера 2 неподвижным выводом закреплена на тоководе 7 при помощи специальной гайки 9.
Токовод 7 двумя винтами М5 закреплен на корпусе 1. Подвижный контакт камеры своим штоком связан с тоководом 14 гибкой связью 8 при помощи шпильки 11 и гайки 10. На шпильке 11 установлен демпфирующий узел 15. Рычаг 3 закреплен в корпусе 1 с помощью оси 22, зафиксированной запорными кольцами 21. Рычаг 3 свободно вращается относительно корпуса 1 на оси 22.
Шпилька 11 проходит через отверстие рычага 3, на конце шпильки 11 установлена шайба 30, втулка 12 и две ограничивающие гайки 13, обеспечивающие регулировку провала подвижного контакта камеры. На рычаге 3 с противоположной стороны от оси закреплена плита 17, являющаяся якорем электромагнита 5.
Крепежные скобы 16 жестко закреплены на корпусе 1 и являются несущим каркасом для электромагнита 5 и панели управления 23. На плите 19 электромагнита установлен телескопический узел, состоящий из втулки 31, опоры 18 и возвратной пружины 4.
Для регулировки и ограничения хода подвижного штока камеры служат: шпилька 25, резьбовая втулка 26 и гайка 27.
Регулировка хода осуществляется вращением резьбовой втулки 26 на шпильке 25 и фиксируется с помощью гайки 27.
Включение контактора осуществляется при подаче напряжения 110 В в цепь управления на включающие катушки электромагнита 5. При этом плита 17 притягивается к сердечникам электромагнита 5 и переводит рычаг 3 во включенное положение.
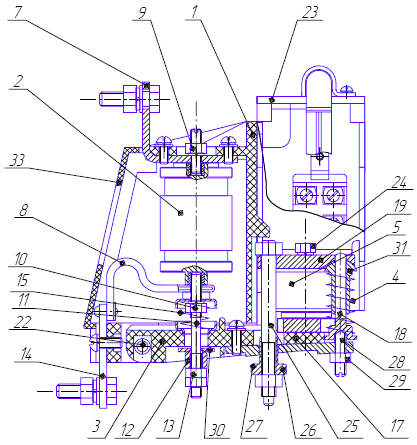
Рис. 18. Контактор вакуумный КВТ – 1,14
Рычаг 3 освобождает ограничивающие гайки 13 и шток камеры под действием атмосферного давления через сильфон перемещается вверх, контакты камеры замыкаются. Демпфирующий узел 15 поджимает шток камеры 2, что уменьшает дребезг контактов при включении. Рычаг 3, перемещаясь, увеличивает натяг пружины 4. Планка, закрепленная на рычаге 3, переключает вспомогательные контакты 20.
В конце цикла включения в цепь управления контактора подается пониженное напряжение – напряжение удержания. Переключение напряжения производится схемой потребителя. При этом время подачи напряжения включения должно быть от 20 до 60 мс.
При снятии напряжения с включающих катушек возвратная пружина 4 переводит рычаг 3 в отключенное положение. Рычаг через втулку 12, ограничивающие гайки 13, шпильку 11 перемещает шток камеры 2. Контакты камеры размыкаются.