

Ишимбайский нефтяной колледж

ГРУЗОПОДЪЕМНЫЕ МЕХАНИЗМЫ
И ТРАНСПОРТНЫЕ СРЕДСТВА
КУРС ЛЕКЦИЙ
с контрольными вопросами

Автор: преподаватель Оксанич Л.В.
2010
СОДЕРЖАНИЕ:
Введение 3
Раздел 1 Грузоподъёмные механизмы 12
Классификация, основные параметры и основы
расчета грузоподъемных механизмов 12
Грузозахватные приспособления 33
Элементы грузоподъемных машин и механизмов 50
Металлоконструкции грузоподъемных машин 63
Раздел 2 Транспортирующие машины 69
2.1. Основные критерии выбора вида и типа транспортирующих
машин 69
2.2 Транспортирующие машины с тяговым элементом 75
2.3 Транспортирующие машины без тягового органа 99
2.4 Напольный транспорт 107
Раздел 3 Техника безопасности при эксплуатации
подъемно - транспортных машин 118
Литература 124
Лекция 1
ВВЕДЕНИЕ
Цель: иметь представление о содержании дисциплины, об истории развития, новейших достижениях в области подъёмно-транспортного машиностроения и о перспективах развития данной отрасли.
Учебная дисциплина «Грузоподъемные механизмы и транспортные средства» относится к циклу общепрофессиональных и обеспечивает необходимый уровень знаний грузоподъемных механизмов и транспортных средств выпускников по специальности 150411 «Монтаж и техническая эксплуатация промышленного оборудования».
Без определенного минимума знаний в области подъемно–транспортного машиностроения специалист любой отрасли не сможет осуществить правильный выбор оптимальных подъемно–транспортных средств, рационально организовать проведение механизации погрузочно – разгрузочных работ и технологических процессов, направленной на повышение производительности труда. Техник – механик должен знать основные виды подъемно–транспортных машин, их особенности, области использования, должен уметь правильно и обоснованно выбрать тип и параметры машины, выполнить необходимые основные расчеты.
Дисциплина «Грузоподъемные механизмы и транспортные средства» опирается на знания, полученные при изучении дисциплин: «Техническая механика», «Материаловедение», «Детали машин».
Грузоподъемные и транспортные машины и средства являются самыми распространенными машинами, они применяются буквально во всех отраслях промышленности.
Когда то машинами называли приспособления для поднятия тяжестей, других машин тогда не было. Древнеримский ученый и зодчий Витрувий так писал в своих сочинениях две тысячи лет назад: машина “соединение деревянных частей, представляющее большие преимущества для поднятия грузов”.
Устройства для подъема или перемещения грузов были известны в глубокой древности. Уже на ранних ступенях развития человеческого общества возникла необходимость в устройствах для подъема тяжелых грузов (упавших деревьев, тяжелых каменных глыб). Подъем и перемещение очень больших по весу грузов при постройках в древнем мире, например, сооружение пирамиды Хеопса более чем за 2000 лет до н. э., постройки в древнем Риме, были невозможны без простейших грузоподъемных приспособлений. Наиболее ранними грузоподъемными средствами были рычаги, катки и наклонная плоскость, позволявшие поднимать и перемещать грузы без применения промежуточных деталей (цепей, канатов), связывающих подъемное устройство с грузом. С их помощью осуществлялись доставка и установка колоссальных скульптур для дворцов и храмов и громадных каменных плит при возведении пирамид в древнем Египте. Значительно позже появились устройства, которыми груз поднимали и перемещали при помощи веревки; к этим устройствам относятся ворот, блок. Блок был изобретён, по–видимому, в начальный период железного века. Это нужное приспособление, казалосьбы, могли изобрести люди, знакомые с колесом. Однако же, по довольно достоверным данным, известно, что египтяне бронзового века не поднимали паруса с помощью блока и определённо, не пользовались им на крупных строительных работах. Первые достоверные свидетельства о наличии блока на барельефе были обнаружены в Ассирии и относятся к VIII веку до н.э. Блок это небольшое колесо на оси; по ободу колеса канавка, в канавку удобно укладывается верёвка или прочный канат, обхватывающий блок с трёх сторон. Если блок подвесить повыше между двух деревянных столбов и к одному из концов верёвки привязать груз, то можно, оставаясь на земле, поднять этот груз до верхушек столбов.

Рисунок 1.1 – Использование ворота
Именно так устроен простейший подъёмный кран. Всё удобство этого крана в том, что человек, оставаясь на земле, тянет за верёвку вниз, а груз поднимается вверх. Блок нашёл себе применение и в современном подъемном кране – в больших кранах с электрическими моторами и в обыкновенных лебёдках. Вместо груза внизу можно подвесить ещё один блок, обернув и его канатом, а верхний конец каната прочно закрепить. Потянешь за свободный конец – нижний блок поползёт вверх. А к этому блоку (его называют подвижным в отличие от неподвижного верхнего) можно тоже прикрепить груз с помощью крюка. Для чего усложнять конструкцию крана? Дело в том, что при подъёме груза с помощью подвижного блока вдвое легче тянуть за канат. Хотя чтобы поднять груз на один метр от земли, придется вытягивать не один, а два метра каната. Ведь для того, чтобы поднять подвижный блок на один метр, нужно “укоротить” канат и слева и справа на один метр, то есть всего на два метра. А неподвижный блок не даёт выигрыша в силе, зато меняет её направление: тянем вниз, а груз поднимается вверх. Блок, являющийся простейшим механизмом, нельзя было изготовить достаточно дешёвым способом, пока не появилось железо и в качестве материала и как орудие производства. Как бы там ни было, но появление блока вскоре вызвало коренной переворот в области строительства. Он позволил поднимать и укладывать на место камни гораздо производительнее, чем с помощью практиковавшегося в бронзовом веке способа их подъёма по земляной наклонной плоскости с последующим сбрасыванием на нужное место. Подвижные и неподвижные блоки позволяют в четыре, в шесть, в восемь раз “уменьшить” вес груза для этого применяют устройства из четырёх, шести, восьми блоков. Такие устройства называют полиспастами, что в переводе с греческого означает “много тянуть”. Так вот при помощи таких машин строители поднимали огромные плиты, возводили гигантские сооружения. Приходилось ”много тянуть” за верёвку, зато непосильный груз рано или поздно поднимали и ставили на место. Изобретение древних механиков дожило и до наших дней. Древние греки применяли для подъема грузов приспособление "журавль" (по гречески – "геранос"). "Журавль" обозначает по немецки – "краних", откуда и произошло русское название "кран" для различных грузоподъемных устройств. Подъемник "геранос" с ручным приводом использовался в V века до н. э. для возведения крепостных стен, а также при театральных зрелищах для подъема по ходу пьесы действующих лиц и театральной бутафории.
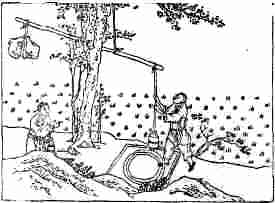
Рисунок 1.2 – Приспособление для подъема грузов
Прообразы современных стреловых кранов использовались для подъема воды в древнем Китае, Индии и странах Востока. Задолго до начала нашего летоисчисления в Китае применялись горизонтальные и вертикальные вороты с ручным приводом. Позднее древними греками были введены в практику рудо-подъема, транспорта и строительства конные вороты, полиспасты и сложные подъемные установки, состоявшие из раскрепленных канатами наклонных столбов с постоянными или переменными углами наклона к горизонту и из подвешенных к столбам полиспастов с простейшими захватными устройствами для штучных грузов. Дальнейшее совершенствование этих установок римлянами привело к созданию поворотных подъемных кранов. По описанию, относящемуся к I веку до нашей эры, краны эти укреплялись на прочных деревянных брусьях, которые могли поворачиваться на катках в любую сторону. Подъем груза такими кранами мог осуществляться на высоту до 12м; приводились они в действие с помощью ручных воротов.
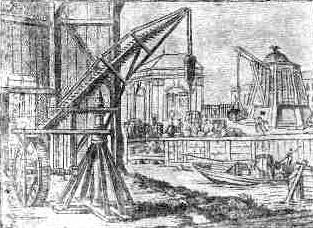
Рисунок 1.3 – Древний подъемный кран
В Западной Европе в XI – XII вв. происходит дальнейшее развитие техники. В XIV – XV вв. в связи с развитием торговли и мореплавания и ростом горно-металлургической промышленности отмечается некоторое совершенствование грузоподъемных устройств. По мере развития механики конструкция грузо-подъемных средств совершенствовалась. Появились лебедки и полиспасты, что позволило путем сочетания их перемещать и поднимать тяжелые грузы с большой скоростью или с меньшими усилиями. Соединение ворота с блоком или полиспастом создало основное звено грузоподъемного устройства – механизм подъема и дало толчок к появлению различных по конструкции типов кранов (поворотных, переносных). Появление ярко выраженных конструкций кранов относится к периоду XIV–XV вв., когда в Европе (Италии, Германии, Чехии) стали создаваться поворотные, стреловые и цепные краны с остовом из дерева и с конным приводом. В связи с промышленным развитием Европы краностроение стало развиваться в конце XVIII и начале XIX в. после изобретения парового двигателя (Уатт,1763г.). Особенностью грузоподъемных механизмов, установок и устройств, вводившихся в эксплуатацию до XIX века, было применение дерева как строительного материала для ответственных узлов (остовов, стоек, воротов и т. д.). Так, например, ободы и зубья зубчатых колес в этих механизмах и установках выполнялись деревянными. Сталь применялась только для таких деталей, как оси, храповики, крюки. Замена дерева металлом сравнительно широко начинает осуществляться лишь в первой четверти XIX столетия. В двадцатых годах XIX столетия в Париже был построен целиком из дерева первый мостовой кран. Деревянные и деревянно-металлические несущие конструкции мостовых и козловых подъемных кранов, стрел портальных кранов сравнительно часто применялись еще в последней четверти XIX в. Приведение в действие рассматриваемых механизмов и установок осуществлялось мускульной силой человека или животных. Лишь в начале прошлого столетия, когда с развитием промышленности и транспорта все чаще возникала необходимость в подъеме тяжелых грузов, при увеличении скоростей подъема и горизонтального перемещения, начинает применяться машинный привод для кранов большой грузоподъемности и для подъемников общего назначения. Наиболее ранним по времени использования в машинах рассматриваемой группы явился гидравлический привод, где рабочей жидкостью служила вода, подававшаяся в рабочие цилиндры под давлением, достигавшим нескольких десятков атмосфер. Начало применения этого привода относится к концу XVIII в. Однако первый подъемный кран с гидравлическим приводом был введен в эксплуатацию в Англии в 1846 – 1847гг., и только во второй половине XIX в. гидравлический привод получил широкое распространение в стационарных и передвижных кранах, в пассажирских и грузовых подъемниках (лифтах), домкратах и пр. В 1811г. Бетанкуром в России была построена многочерпаковая землечерпательная машина с паровым приводом, в 80-х годах прошлого столетия был построен первый паровой железнодорожный кран и в 1877г. кабельный кран. В тридцатых годах XIX в. в Англии (1827г.) впервые осуществляется постройка стационарного парового подъемного крана. Но в последующий период краны с паровым приводом не получили заметного распространения вследствие несовершенства конструкции. В 90 годах XIX века, вследствие совершенствования паросиловых установок, уменьшения их габаритных размеров и веса, паровые краны постепенно вытесняют гидравлические краны. В 1880г. в Германии был построен первый электрический подъемник (лифт) с механизмом подъема, состоявшим из двигателя, червячной передачи и зубчатых колес, которые входили в зацепление с зубьями неподвижной направляющей рейки. В то же время в Германии был построен электрический мостовой кран с приводом всех механизмов от одного электродвигателя, а в 1889г. в США был введен в эксплуатацию первый электрический мостовой кран с индивидуальным электроприводом механизмов подъема груза, передвижения грузовой тележки и передвижения моста крана. В 1885 и 1891 гг. применение электрического привода распространяется на козловые, полупортальные и стационарные поворотные краны. В 1895г. для передвижных кранов впервые был применен привод от двигателей внутреннего сгорания. Промышленное краностроение особенно стало развиваться после изобретения электропривода. С появлением электропривода в Германии были созданы электрические лебедки фрикционная (1880г.) и электрореверсивная (1908г.). К этому периоду относится создание электрических подъемников (1880г.) и мостовых кранов. С развитием жилищного и промышленного строительства появилась потребность в создании строительных кранов для замены тяжелого человеческого труда. В 1902г. были созданы краны-укосины, состоящие из металлической укосины (плоской треугольной фермы) с блоками, укрепленной на деревянной трубчатой мачте, и с лебедкой, установленной на земле. В 1905г. в Германии был впервые создан свободно стоящий поворотный стационарный, а в 1908г.- передвижной башенные краны с изменением вылета с помощью грузовой тележки, передвигающейся по стреле. В 1914г. был создан башенный кран с подъемной стрелой, имеющий все основные признаки современных конструкций. В конце XVII века в Московском Кремле был поднят при помощи ручных лебедок (воротов) с использованием противовесов и рычагов Царь–колокол весом более 130 т. Лебедки при этом были размещены на башне. Поднятые заранее небольшие грузы – противовесы были уложены на площадках, подвешенных к канатам, переброшенным через четырехгранные блоки. Применение противовесов значительно уменьшило усилие для подъема груза.
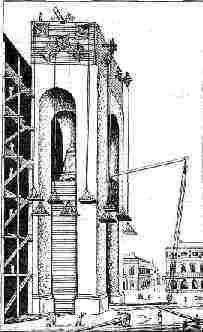
Рисунок 1.4 – Подъем Царь – колокола
На рисунке 1.5 показано устройство для подъема руды, предложенное в 1752г. Две грузовые платформы были связаны с воротом таким образом, что груженая рудой платформа под действием составляющей собственного веса платформы и груза перемещалась вниз и поднимала при этом параллельно расположенную пустую платформу. Для регулирования скорости спуска применялся одноколодочный тормоз, колодка которого системой рычагов действовала на большое тормозное колесо, насаженное на вал ворота. Подобные маятниковые скатные устройства нашли применение в горнозаводском деле. До XVIII в. основными источниками энергии грузоподъемных машин были мускульная сила человека или животного и сила падающей воды. Машина К. Д. Фролова, снабженная двумя попеременно поднимающимися бадьями, приводилась в движение силой падающей воды.
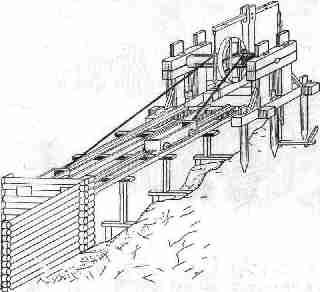
Рисунок 1.5 – Устройство для подъема руды
Изменить направление движения подъемных канатов можно было путем перемещения специальным затвором потока падающей воды на правую или левую половину приводного колеса. Машина была снабжена одноколодочным тормозом, управляемым вручную через рычажную систему.
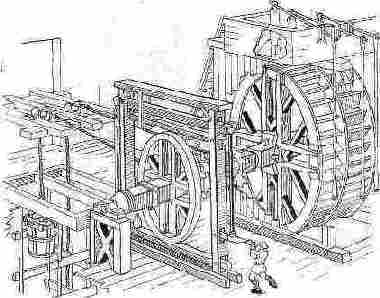
Рисунок 1.6 – Машина Фролова
Примером применения лебедок, полиспастов и катков для перемещения груза на значительные расстояния может служить доставка гранитного камня весом около 1000 пудов для цоколя памятника Петру I в 1769г (рисунок 1.7). Камень перемещался по специальному настилу из двух деревянных рам-обойм, имевших продольные желоба, армированные медными листами. В желобах, между верхней и нижней обоймами, помещались бронзовые шары. Обоймы с шарами образовывали подобие шарикового упорного подшипника. По мере продвижения под камень, помещавшийся на верхней деревянной раме-обойме, укладывались новые нижние обоймы с шарами.
С помощью деревянных лесов и деревянных воротов в 1828 – 1830 гг. в Петербурге были выполнены работы по установке колонн двухъярусной колоннады Исаакиевского собора, а в 1832г. работы по установке Александровской колонны, вес которой превышал 600 тонн. В дореволюционной России еще около ста пятидесяти лет назад индивидуальное позаказное производство подъемных кранов велось на Костромском механическом заводе. В конце XIX в. выпуск различных типов подъемного оборудования был освоен рядом крупнейших машиностроительных заводов (Сормовский, Коломенский, Брянский, Краматорский, Путиловский и др.).
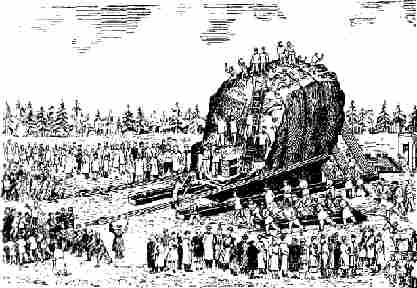
Рисунок 1.7 – Доставка гранитного камня для цоколя памятника Петру I
Первые описания грузоподъемного и транспортного оборудования появились в трудах АН и Московского университета: в 1772 г. Г.Г. Скорняков–Писарев опубликовал «Краткий учебник механики», затем в 1763 г. М.В. Ломоносов описал его в книге «Первые основания металлургии, или рудных дел». По подъемно-транспортному машиностроению в нашей стране имеется обширная научно-техническая литература, появившаяся в основном в советский период. К более раннему времени, к концу XIX в. и первым двум десятилетиям XX в., относится только несколько книг. Первой вышедшей в России в 1872 г. книгой был «Курс подъемных машин» профессора С.-Петербургского технологического института И. А. Вышнеградского. В этом курсе предмет изложения трактуется уже настолько широко, во взаимосвязи с машиностроением вообще, что, по выражению проф. В. Л. Кирпичева, он заключает «изложение общих правил машиностроения, а подъемные машины представляют лишь конкретный пример, на котором изъясняются общие правила». Придавая этому курсу большое значение, сам Вышнеградский говорил, что «кто умеет строить краны, тот сумеет любую машину построить». Дальнейшее развитие в том же технологическом институте данный курс получил в трудах профессоров А. М. Самуся и М. Г. Евангулова. Курс грузоподъемных машин с конца XIX в. преподавался и в других высших технических учебных заведениях России, а именно: в Московском высшем техническом училище (ныне имени Баумана) проф. А. И. Сидоровым и проф. Л. Г. Кифером, в Харьковском технологическом институте проф. В. Тиром, в Рижском политехническом институте проф. М. Н. Берловым, а впоследствии в более молодом институте — в С.-Петербургском политехническом институте (ныне Ленинградском политехническом институте имени М. И. Калинина) — Л. 3. Ратновским.
Большой материал по деталям грузоподъемных машин и по крановым конструкциям был собран и издан в атласах, выпущенных проф. М. Н. Берловым. В текстовой части этих книг автором были разработаны расчет и методика конструирования элементов грузоподъемных машин, кранов и лебедок в целом, дана их классификация и общие характеристики. Необходимо отметить также труды проф. Н. Н. Емцова и проф. А. И. Дукельского по портовым и судовым грузоподъемным машинам, в которых были даны общие современные принципы построения указанных машин. Сейчас в России созданы специализированные заводы по выпуску грузоподъемных и транспортных устройств, а так же научно – исследовательские и проектные организации. В настоящее время в нашей стране созданы совершенные грузоподъемные и транспортные машины, заменяющие тысячи рабочих рук. Однако, механизация вспомогательных операций и погрузочно – разгрузочных работ производилась недостаточно интенсивно, поэтому удельный вес ручного труда в некоторых отраслях промышленности высок. Совершенствование промышленного транспорта базируется на знании теории рабочих процессов, расчета и конструкции машин, а также правильной организации технической эксплуатации оборудования. Для создания работоспособных, экономичных и долговечных грузоподъемных и транспортирующих устройств необходимо сочетание теории с практическим опытом конструирования и эксплуатации. Успешная работа любого современного предприятия базируется на массовой механизации производственных процессов, в первую очередь таких трудоемких и тяжелых, как транспортирование материалов, деталей и изделий.
Грузоподъемные и транспортные машины предназначены:
─ для уменьшения доли ручного труда при погрузочно – разгрузочных работах и перемещении грузов;
─ для сокращения сроков монтажа промышленного оборудования;
─ для повышения качества монтажных и пуско – наладочных работ, при этом оборудование может поставляться на площадку укрупненными блоками, собранными на заводе;
─ для механизации производственных процессов.
В настоящее время грузоподъемные, транспортные машины настолько разнообразны по назначению, области применения, принципам действия, конструкции, что все их изучить в курсе дисциплины «Грузоподъемные машины и транспортные средства» (ГПМ и ТС) не предоставляется возможным, поэтому здесь рассматриваются только основные типы машин.
Грузоподъемные и транспортные устройства делят на две группы:
─ машины периодического действия;
─ машины непрерывного действия.
Машины периодического действия характеризуются цикличностью работы, подачей груза порциями по произвольной трассе.
Различают:
Грузоподъемные механизмы: простые (домкраты, лебедки, тали) и сложные (краны, подъемники).
Транспортирующие машины – рельсовый и безрельсовый наземный внутризаводской транспорт: тележки, кары, погрузчики, скреперы.
Машины непрерывного действия характеризуются перемещением грузов непрерывным потоком по одной строго определенной трассе.
Различают:
Транспортирующие машины с тяговым органом – машины, в которых тяговое усилие от двигателя передается рабочему органу гибким тяговым органом (канатом или цепью). Груз непрерывным потоком перемещается на тяговом органе, или на устройствах, прикрепленных к нему (ленточный, цепной, пластинчатый, подвесной конвейеры).
Транспортирующие машины без тягового органа – гравитационный транспорт, роликовые, винтовые, инерционные и др. конвейеры.
При выборе грузоподъемных машин следует учитывать следующие факторы: характер производства, его особенности, род и физико – механические свойства грузов. При этом транспортировка должна обеспечивать сохранность груза, необходимую производительность, создание благоприятных условий труда для обслуживающего персонала.
Все вопросы проектирования, изготовления, транспортирования, монтажа и безопасной эксплуатации ГПМ регламентированы Правилами устройства и безопасной эксплуатации грузоподъемных кранов, утвержденными Госгортехнадзором в 1969г. Требования к электрооборудованию ГПМ изложены в Правилах устройства электроустановок (ПУЭ).
Контрольные вопросы:
Каково назначение подъемно-транспортных машин для различных видов производства?
Приведите примеры применения подъемно–транспортных машин.
Чем характеризуются машины периодического действия и как классифицируются?
Чем характеризуются машины непрерывного действия и как классифицируются?
Какие факторы учитывают при выборе ГПМ?
Какими нормативными документами регламентируются вопросы проектирования, изготовления, транспортирования, монтажа и безопасной эксплуатации ГПМ?