

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ,
МОЛОДЕЖИ И СПОРТА УКРАИНЫ
Национальный технический университет Украины “кпи”
Институт энергосбережения и энергоменеджмента
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К ЛАБОРАТОРНОЙ РАБОТЕ №8
ПО КУРСУ:
”Элементы автоматизированного электропривода“ Лебедев л.Н. , Дубовик в.Г.,
Тиристорные элементы
Утверждено
на заседании кафедры
автоматизации управления
электротехническими комплексами
Протокол № 14 от 28 июня 2011 г.
Киев 2012
ЦЕЛЬ РАБОТЫ: знакомство с технической документацией, схемными и конструктивными особенностями полупроводниковых преобразователей первого поколения.
ПРОГРАММА РАБОТЫ:
1. Ознакомиться с краткими теоретическими сведениями.
2. Изучить заводскую инструкцию простейшего преобразователя первого поколения типа РНТО.
3. Составить структурную схему преобразователя РНТО. На структурной схеме обозначить напряжения, эпюры которых приведены в заводской инструкции.
4. Определить принадлежность узлов и блоков преобразователя РНТО к системам полупроводниковых преобразователей.
5. Записать паспортные данные РНТО, осциллографа, приборов и определить для измерения каких величин предназначены измерительные приборы.
6. Снять характеристики упр и UРНТО при активной нагрузке преобразователя и сравнить их с расчетными.
7. Определить параметры сигнала, поступающего на управляющий электрод тиристора: амплитуду и длительность импульса при токе управления Iупр = 5 мА; скважность и частоту заполнения импульсов управления.
8. Снять с помощью осциллографа эпюры напряжений в характерных точках СИФУ и сравнить их с заводскими эпюрами.
Краткие теоретические сведения
Простейшим тиристорным преобразователем является встречно-параллельная пара однооперационных тиристоров (рис.2а). На рис.2б показан симметричный тиристор по своим ВАХ эквивалентному встречно-параллельному соединению двух тиристоров, но имеющему габариты только одного тиристора. Подобные ВАХ можно получить с помощью схем рис.2в, рис.2г. Схема 2в отличается наличием только одного тиристора, а 2г отсутствием на тиристорах большого обратного напряжения. Чаще всего в приводах переменного тока встречаются схемы тиристорных элементов (ТЭ), показанные на рис.2а, рис. 2б.
А) Б) В) Г)
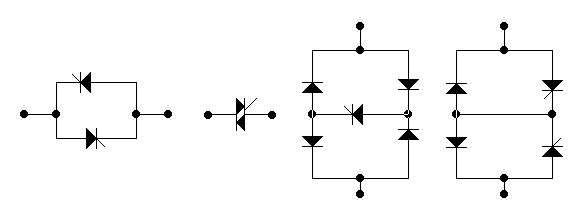
Рис.2
В приводах с асинхронными двигателями ТЭ включаются как в цепи статора, так и в цепи ротора. ТЭ могут быть использованы при любой схеме соединений обмоток статора АД, включаться в рассечку нулевой точки или последовательно с обмотками. ТЭ могут быть симметричными, при использовании только тиристоров, и несимметричными при использовании пары тиристор-диод.
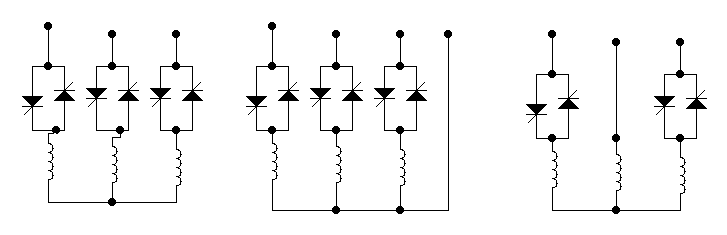
ТЭ, включенные в фазы статора и (или) ротора, могут быть использованы для пуска, реверса, торможения, регулирования скорости, ограничения момента, рывка или для улучшения энергетических показателей недогруженных приводов. В фазах ротора ТЭ обычно используют совместно с реостатом (тиристорно-реостатное управление АД). Наиболее часто встречающиеся схемы включения ТЭ в фазы статора АД показаны на Рис.3
А) Б) В)
Г)
Д)
Ж)
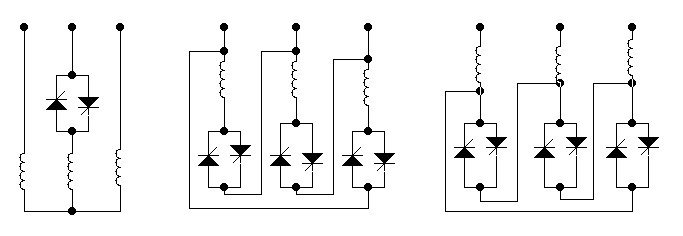
Рис.3
Для регулирования напряжения, подводимого к статору АД, применяется импульсно-фазовый или интегро-импульсный методы регулирования. При импульсно-фазовом методе регулируется соотношение времени закрытого и открытого состояния тиристора в течении очередного полу периода напряжения. При интегро-импульсном методе регулируется число полу периодов закрытого и открытого состояния тиристоров.
Неполная управляемость однооперационных тиристоров в схемах с естественной коммутацией приводит к тому, что процесс восстановления запирающих свойств начинается не в момент снятия управляющих импульсов, а лишь после снижения тока через тиристор до величины меньшей тока удержания. Максимально возможное время запаздывания начала восстановления запирающих свойств тиристоров равно половине периода питающего напряжения.
Следует иметь в виду, что АД является активно-индуктивной нагрузкой, вызывающей сдвиг по фазе между током и напряжением зависящий от скольжения, т.е. от нагрузки двигателя. Эту особенность следует учитывать при выборе длительности импульсов управления.
Фазосдвигающее устройство (ФСУ) в преобразователе РНТО выполнено на базе однополупериодного магнитного усилителя. Усилитель состоит из одного сердечника с рабочей и управляющими обмотками и рабочей цепи с вентилем и нагрузкой. Магнитное состояние сердечника с прямоугольной петлей гистерезиса (BR = BS) при некотором установившемся сигнале тока управления изменяется по частному циклу. В момент насыщения сердечника (B =BS) напряжение на рабочей обмотке МУ уменьшается и почти все напряжение питания прикладывается к нагрузке (к сопротивлению R9). В начале отрицательного участка напряжения, питающего рабочую обмотку, вентили запираются и отключают рабочую обмотку от напряжения питания. Индукция под воздействием тока управления, действующего в противоположном направлении по сравнению с рабочим током, начинает уменьшаться, стремясь к - BS. В конце отрицательной части периода индукция становится равной какому то значению, например -B0. В следующий положительный полупериод напряжения момент насыщения сердечника и, следовательно, угол управления определяются начальным значением индукции -B0, т.е. соответствующим значением тока управления. Для получения более удобной зависимости «вход-выход» применяется дополнительная обмотка управления (обмотка смещения), в которую подается ток соответствующей полярности. В этом случае размагничивание сердечника в управляющую часть периода будет определяться разностью токов смещения и управления. Для устранения влияния характеристики кривой намагничивания на точность работы ФСУ и повышения крутизны переднего фронта импульса управления параллельно сопротивлению нагрузки включают транзистор. Описанная схема имеет ограниченное быстродействие, зависимость формы выходного импульса от значения нагрузки фазосдвигающего устройства, цепи управления и материала сердечника. Достоинством данной схемы является возможность суммирования нескольких сигналов управления без электрической связи между ними.
Схема испытаний
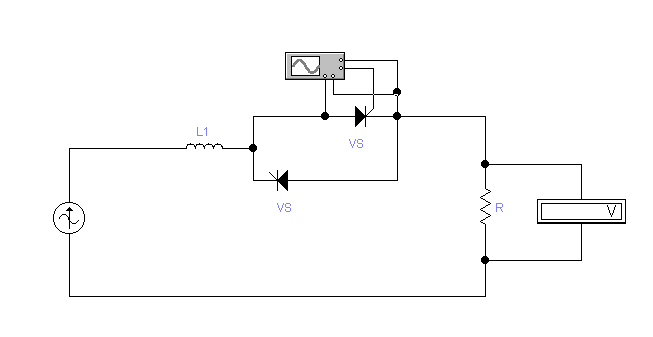
Рис.1