

Лабораторная работа № 4. Тема. Изучение электрических аппаратов низковольтных цепей карьерных электровозов.
4.1. Контроллеры машиниста.
Контроллеры машиниста (управления) предназначены для дистанционного управления силовыми высоковольтными аппаратами. С их помощью к источнику низкого напряжения подключают или отключают в определенной последовательности провода цепи управления, т. е. включают или выключают высоковольтные аппараты при пуске, регулировании скорости, остановке, изменении направления движения и электрическом торможении электровоза.
Таким образом, контроллеры машиниста служат для косвенного управления работой тяговых двигателей в тяговом и тормозном режимах.
Для выполнения этих функций контроллеры снабжаются рядом рукояток, каждая из которых предназначена для выполнения определенных операций управления. Рукоятки имеют несколько фиксированных позиций, соответствующих определенным положениям силовых аппаратов или определенным операциям их переключения, а при автоматическом управлении – определенным режимам переключений.
В системах плавного регулирования в контроллеры встраиваются элементы непрерывного регулирования – регулируемые резисторы или различные индукционные устройства. В этом случае рукоятка может даже не иметь отдельных позиций, но должна фиксироваться в любом положении.
Распределение функций управления и расположение отдельных рукояток контроллера выполняют с учетом обеспечения наибольшей простоты и удобства пользования ими. Для предотвращения ошибочных действий машиниста в контроллере с помощью механических блокировок создают взаимозависимость между рукоятками. Одну из рукояток контроллера, обычно реверсивную, выполняют съемной. Она служит ключом, запирающим остальные рукоятки в выключенном положении: снять реверсивную рукоятку можно только в нулевом положении; в это положение она может быть поставлена только после возвращения остальных рукояток также в нулевое положение. На электровозе обычно имеется два контроллера, а реверсивную рукоятку выдают всегда одну. Поэтому машинист не может случайно оставить какую-либо рукоять на одном из контроллеров во включенном положении, что вызвало бы нарушение правильной работы схемы при управлении составом с помощью другого контроллера. Контроллеры машиниста бывают барабанного и кулачкового типов. Принцип работы их поясняется рис. 4.1.
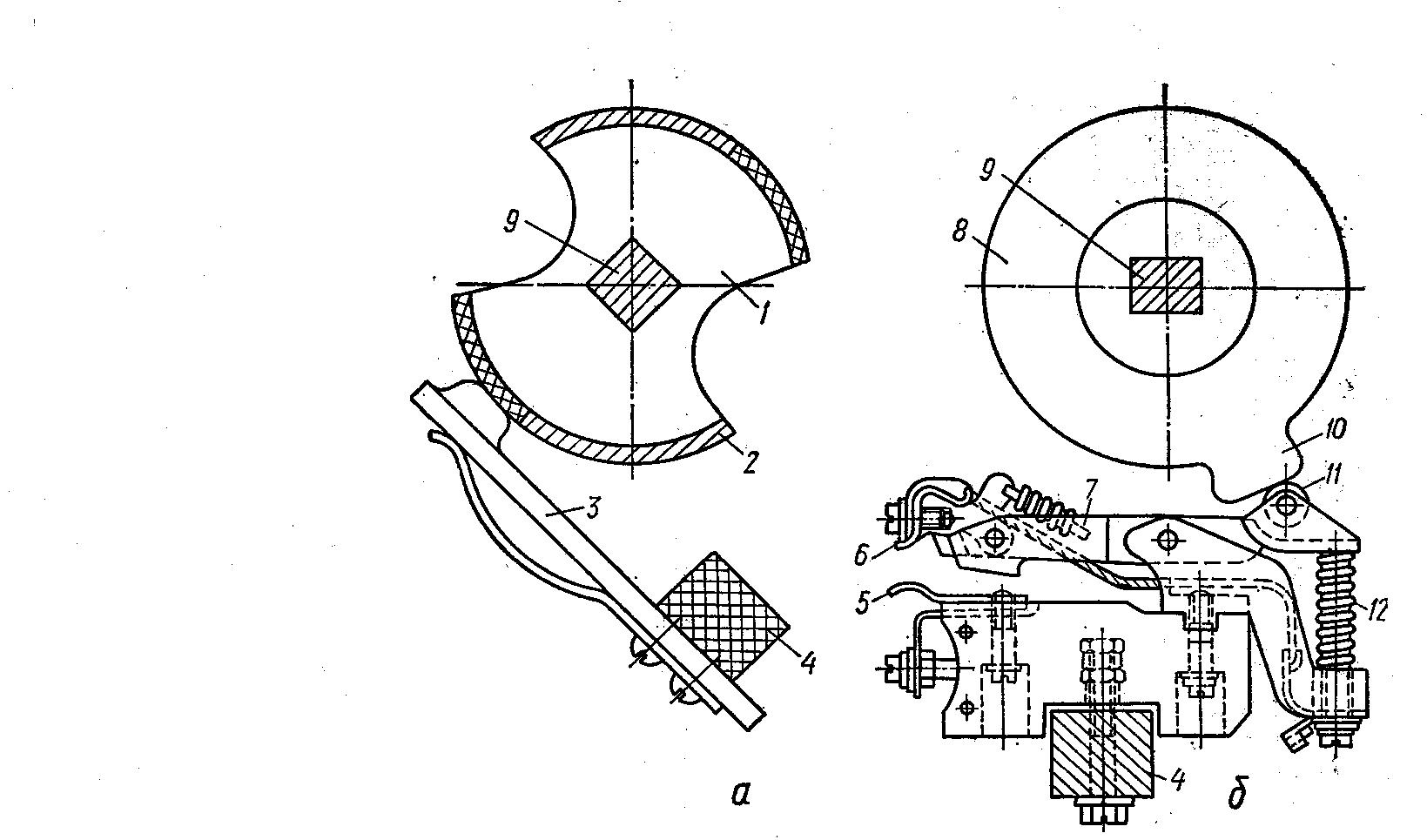
Рис. 4.1. Схемы контроллеров машиниста барабанного (а) и кулачкового (б) типов
В контроллере барабанного типа (рис. 4.1, а) на вал 9 насажен барабан 1, к которому прикреплены сегменты 2. От угла сегмента и его местоположения на барабане при повороте последнего машинистом зависит необходимая последовательность замыкания и размыкания проводов цепи управления, которые присоединяются к соответствующим пальцам 3, закрепленным на стойке 4. Пальцы прижаты к барабану, и контакт между ними осуществляется с помощью сегментов при повороте барабана на определенный угол.
В контроллере кулачкового типа (рис. 4.1, б) замыкание и размыкание проводов цепей управления осуществляется кулачковыми контакторными элементами, укрепленными на стойке 4. Посредством рукоятки машинист поворачивает вал 9, на котором укреплены кулачковые шайбы 8, имеющие выступы 10 различных конфигураций и размеров. Выступ нажимает на ролик 11 контакторного элемента, при этом контакты 5 и 6, к которым присоединяются провода цепи управления, размыкают цепь. Как только выступ шайбы пройдет ролик, сжатая до этого пружина 12 повернет рычаг 7, и контакты 5 и 6 снова замкнутся. Таким образом, контакты контакторов размыкаются кулачковыми шайбами, а замыкаются под действием пружин.
Сопоставление контроллеров обоих типов позволяет отметить, что барабанный контроллер значительно проще по конструкции, дешевле в производстве и ремонте, чем кулачковый. Однако скольжение его пальцев по поверхности сегментов приводит к интенсивному износу контактных поверхностей из-за трения. Износ возрастает с увеличением длины пути скольжения пальцев, а также при дугообразовании на контактах. Контроллер кулачкового типа лишен этих недостатков. На всех отечественных карьерных электровозах и тяговых агрегатах устанавливаются контроллеры кулачкового типа.
Устройство контроллера кулачкового типа, используемого для управления электровозом постоянного тока со ступенчатым резисторным пуском и электрическим торможением тяговых двигателей рассмотрен на рис. 4.2.
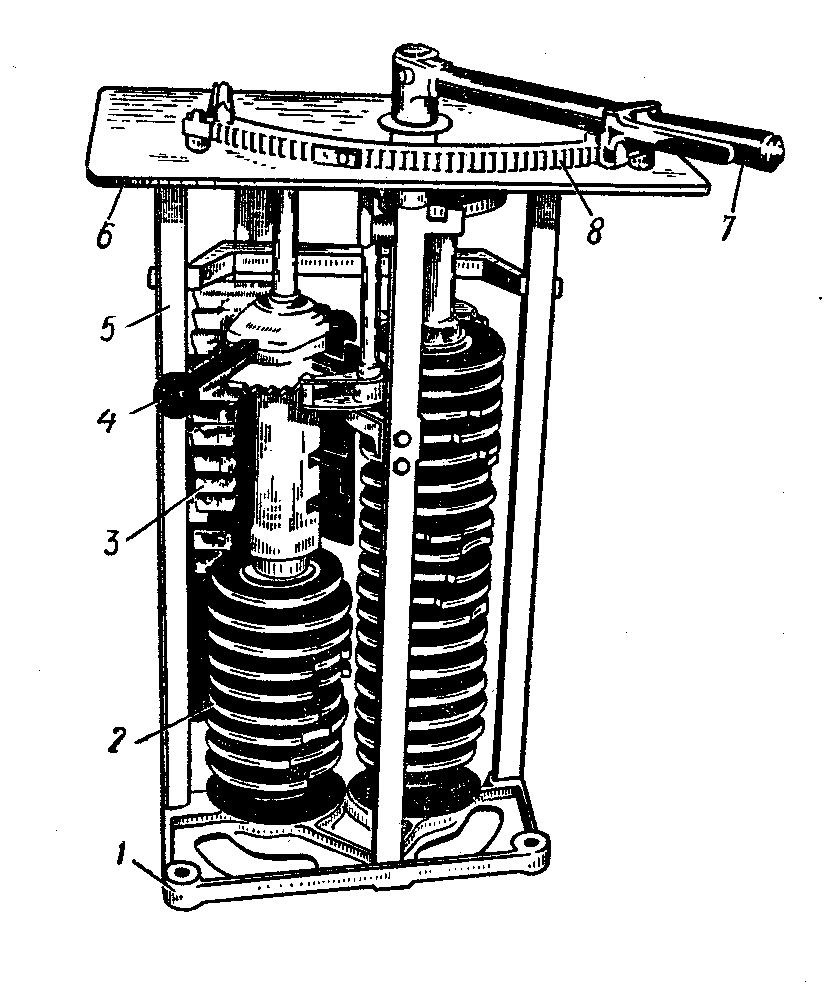
Рис. 4.2. Контроллер со ступенчатым резисторным пуском.
Контроллер собран на литом основании 1, которое соединено с крышкой 6 стальными рейками 5. Кулачковые контакторы 3 укреплены на рейках 5. Контроллер имеет два переключателя: главный и реверсивно-тормозной.
Главный переключатель состоит из двух кулачковых валов, связанных между собой зубчатой передачей. Главный вал включает в себя стальную ось, на которую насажены кулачковые шайбы 2, приводящие в действие 28 контакторов 3. Управляя в процессе движения этим переключателем с помощью несъемной главной рукоятки 7, машинист воздействует на контакторы силовой цепи. На рукоятке 7 имеется защелка; при установке ее во впадины сектора 8 происходит фиксация позиций. Всего фиксированных позиций 37, причем 24-я и 36-я позиции являются безреостатными. На позицию последовательно-параллельного соединения тяговых двигателей рукоятку 7 можно установить только при воздействии на деблокирующее устройство, смонтированное на рукоятке нажав кнопку.
Силовыми реверсивными и тормозными переключателями машинист управляет посредством реверсивно-тормозного переключателя контроллера, приводимого в действие съемной реверсивной рукояткой 4. Реверсивный вал состоит из чугунного корпуса, выполненного соосно с главным валом, кулачковых шайб, закрепленных на корпусе и управляющих десятью кулачковыми контакторами. Оси реверсивного и главного валов вращаются в шариковых подшипниках.
Взаимозависимость (блокировка) главной и реверсивной рукояток выполнена так, что повернуть главную рукоятку на любую фиксированную позицию можно только тогда, когда реверсивная рукоятка не находится на нулевой позиции; поворот реверсивной рукоятки на любую позицию возможен только при нахождении главной рукоятки на нулевой позиции.
Для управления тяговыми агрегатами переменного тока с дизельными секциями автономного питания при плавном регулировании напряжения на тяговых двигателях используют контроллеры, показанные на рис. 4.3.
Контроллер (кулачкового типа) состоит из двух переключателей – главного и реверсивно-тормозного, валы которых закреплены в шариковых подшипниках на нижнем и верхнем 5 основаниях. Сверху контроллер закрыт крышкой 1.
Главный переключатель служит для регулирования угла отпирания тиристоров и дистанционного управления главным контроллером в тяговом и тормозном режимах, а также для управления дизельной секцией. Положение главного переключателя, на вал которого насажен штурвал управления 2, фиксируется на позициях, нанесенных на лимбе 3. Кроме фиксированных позиций, имеется восемь нефиксированных, используемых при работе в режиме автономного питания.
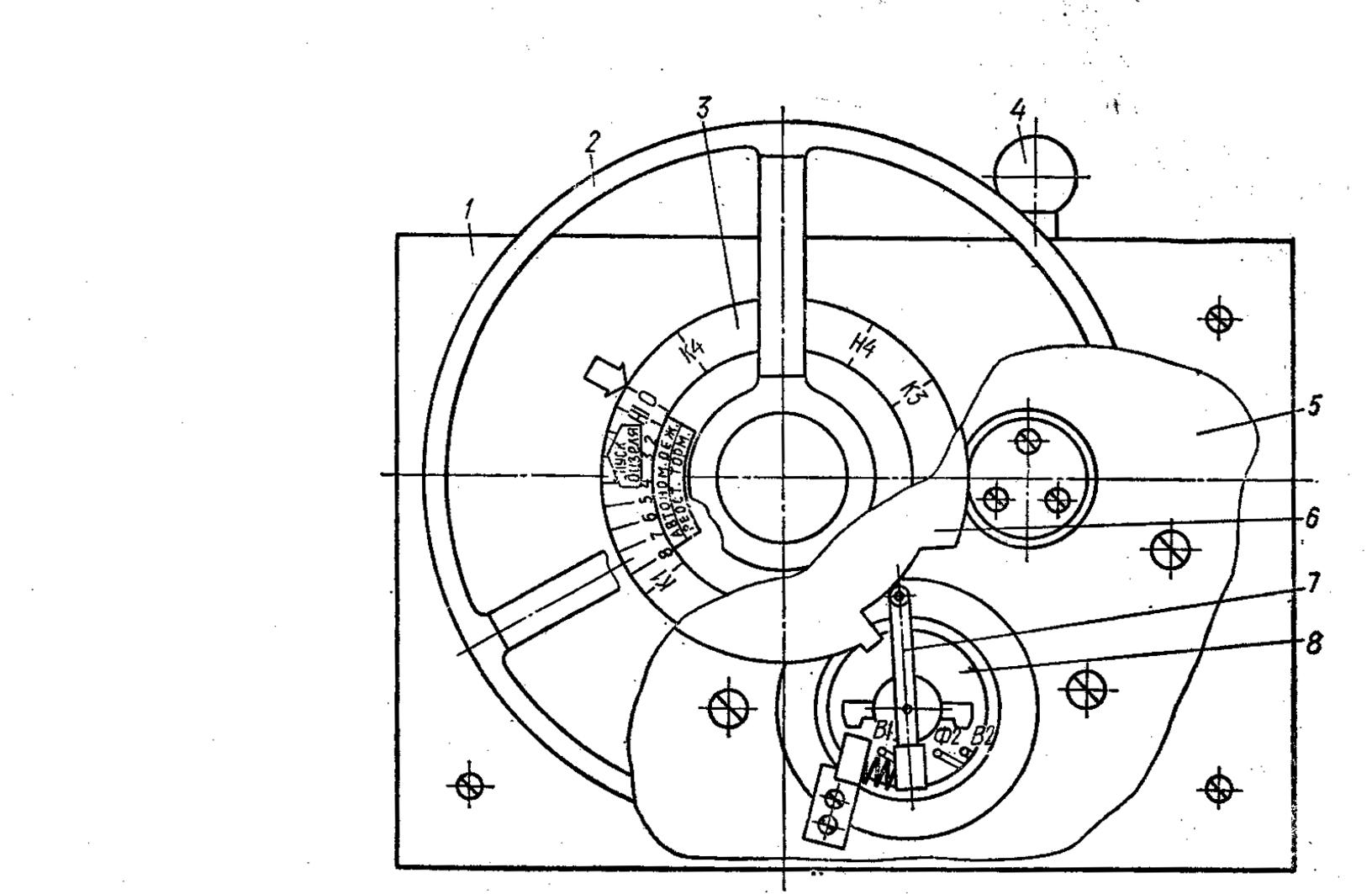
Рис. 4.3. Контроллер управления тяговыми агрегатами переменного тока с дизельными секциями автономного питания
Для регулирования угла отпирания тиристоров управляющими напряжением используется индукционное устройство — сельсин 8. Однофазный сельсин представляет собой асинхронную машину, в которой расположенная на роторе обмотка возбуждения создает пульсирующий магнитный поток. Обмотка статора сельсина имеет три фазы, соединенных в звезду. В данном случае для работы используются только две фазы. Пульсирующий магнитный поток индуктирует в обмотке статора ЭДС, зависящую от угла поворота ротора. При повороте ротора взаимоиндуктивность между обмотками ротора и статора плавно изменяется по закону косинуса, вследствие чего индуктируемая в обмотке статора э. д. с. пропорциональна косинусу угла поворота.
На оси главного переключателя установлена профильная шайба 6, соединенная через поводок 7 с ротором сельсина. Обмотка возбуждения сельсина подключена к блоку питания напряжением 110 В при частоте 50 Гц, а управляющее напряжение изменяется в пределах 1...30В в зависимости от угла поворота ротора.
Управление реверсивно-тормозным переключателем производится посредством съемной реверсивной рукоятки 4, имеющей пять фиксированных позиций.
Фиксация валов обоих переключателей на позициях осуществляется профильными дисками и системой рычагов с пружинами. Для предотвращения ошибочных действий машиниста оба вала сблокированы между собой так, что главный переключатель может быть установлен в любое положение, если реверсивная рукоятка не находится на нулевой позиции; установка реверсивно-тормозного переключателя в нулевое положение возможна лишь при нахождении главного переключателя на нулевой позиции.