

Измерение частоты электромагнитных колебаний
Измерение частоты есть одна из основных задач в измерениях. Это обуславливается рядом причин:
в практике широкое распространение получила различная радиоаппаратура, использующая в своем составе генераторы, для изготовления, настройки и ремонта подобной аппаратуры необходимо уметь измерять частоту генератора;
для измерения различных физических величин необходима привязка к реальному времени; для этой цели используется аппаратура, способная воспроизводить точные интервалы времени;
измерение
частоты является одним из наиболее
точных измерений (погрешность может
достигать
 %),
поэтому зачастую частота используется
в косвенных измерениях;
%),
поэтому зачастую частота используется
в косвенных измерениях;
калибровку большинства вольтметров, амперметров и т.д. производят в нескольких точках частотного диапазона, и естественно возникает задача получения точной и стабильной частоты для этих точек.
В задачи частотомеров входит измерение действительного значения частоты и ее стабильности.
Стабильность частоты различают двух типов:
кратковременная – девиация частоты происходит в течение первого или нескольких, но не более 10 периодов;
долговременная – отклонение частоты измеряется днями, годами и т.д.
Методы определения действительного значения частоты электромагнитных колебаний
На практике из всего множества методов измерения частот распространение получили следующие:
- метод сравнения с эталонной частотой;
- резонансный метод;
- мостовой метод.
Для построения цифровых приборов используется только метод сравнения с эталоном. Метод сравнения с эталоном цифровым способом получил название электронно-счетного частотомера. Суть метода состоит в подсчете количества импульсов измеряемой частоты и сравнения этого количества с количеством импульсов эталонной частоты, формируемой частотомером. Для простоты сравнения либо измеряемую частоту, либо эталонную берут за период измерения, т.е. один период измеряемой или эталонной частоты является периодом измерения. На рисунке 3.1 показана структурная схема подобного частотомера.

ВК – входной компаратор; Г – генератор
Рисунок 3.1 – Структурная схема частотомера по методу сравнения с эталонной частотой
Входной компаратор необходим в схеме для того, чтобы исключить влияние формы измеряемого сигнала на точность измерения. Потенциометр R1 позволяет выбрать точку переключения на входном сигнале, что в некоторых случаях позволяет избежать погрешности. УУ получив сигнал «Старт» сбрасывает счетчик и запускает генератор, который формирует единичный импульс эталонной длины, например 1 секунду. Таким образом, за эталонную длительность счетчик насчитает некоторое количество импульсов частоты fX. Если эталонный импульс равен 1 секунде, то число, насчитанное счетчиком, и есть измеряемая частота. Для некоторых практических применений одна секунда - слишком долгое время измерений, поэтому генератор помимо секундного импульса может формировать импульсы кратные 1 секунде (0.1, 0.01, 10 секунд). Если измерение ведется 0.1 секунду, то для получения реальной частоты на индикаторе достаточно умножить насчитанное счетчиком число на 10, т.е. перенести запятую на индикаторе вправо на 1 разряд.
Данному методу присуща методическая погрешность ±1 импульс из-за того, что начало формирования эталонного импульса не синхронизировано с периодом измеряемого сигнала. Для преодоления методической погрешности в схему вводят блок согласования, который позволяет начинать формировать эталонный импульс синхронно с каким-либо состоянием измеряемого сигнала. Чаще всего, это передний или задний фронты. Точность измерения тем выше, чем дольше они длятся. Вместе с тем при измерении низких частот для получения необходимой точности период измерения становится очень большим, что не всегда приемлемо для практического использования.
В этом случае переходят ко второй структурной схеме (рисунок 3.2). Сигнал с ВК не идет на элемент И, а идет по пунктирным стрелкам на устройство управления. УУ подает на элемент И сигнал логической единицы, равный по длительности периоду измеряемой частоты. Для этого в УУ может использоваться, например, Т-триггер. Генератор в этом случае формирует высокочастотные стабильные импульсы с периодом кратным секунде. Причем, чем выше частота, тем точнее измерения. Таким образом, счетчик насчитывает число, которое показывает, сколько эталонных периодов известной длительности умещается в одном периоде неизвестной частоты, т.е. другими словами для высокой частоты fX измеряется ее частота, а для низкой измеряется ее период. Чаще всего частотомеры при измерении низких частот отображают именно период измеренной частоты. Генератор может изменять частоту ступенчато, кратно секунде. Для учета этого измерения достаточно просто перенести запятую на индикаторе.
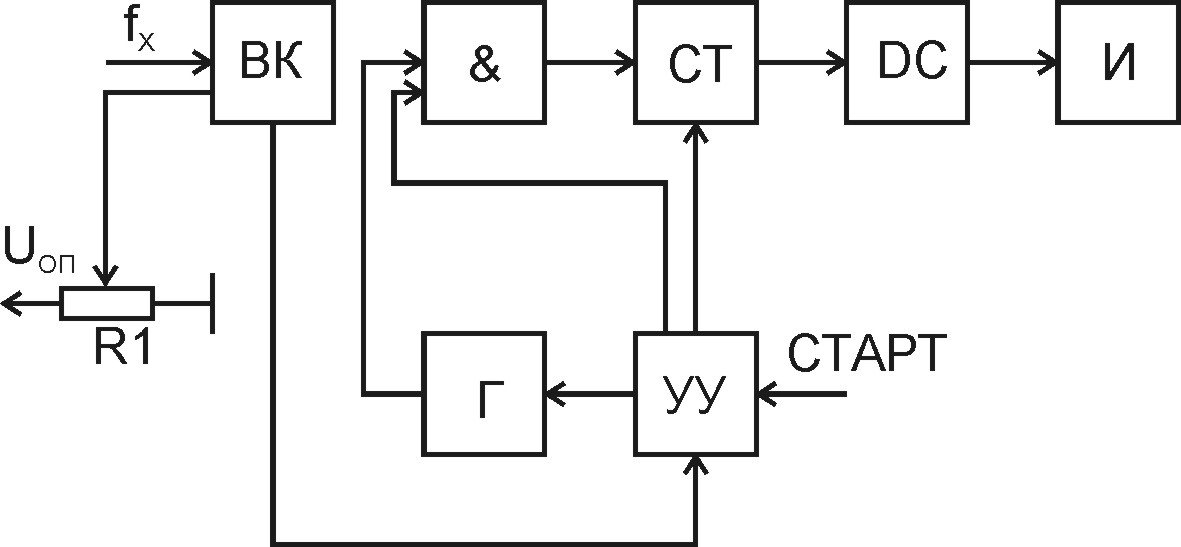
Рисунок 3.2 - Структурная схема частотомера по методу сравнения с эталонной частотой для низких частот