

Метод с промежуточным преобразованием напряжения в частоту
На рисунках 2.5 и 2.6 показаны структурная схема вольтметра по частотно-импульсному методу и временные диаграммы, поясняющие его работу.
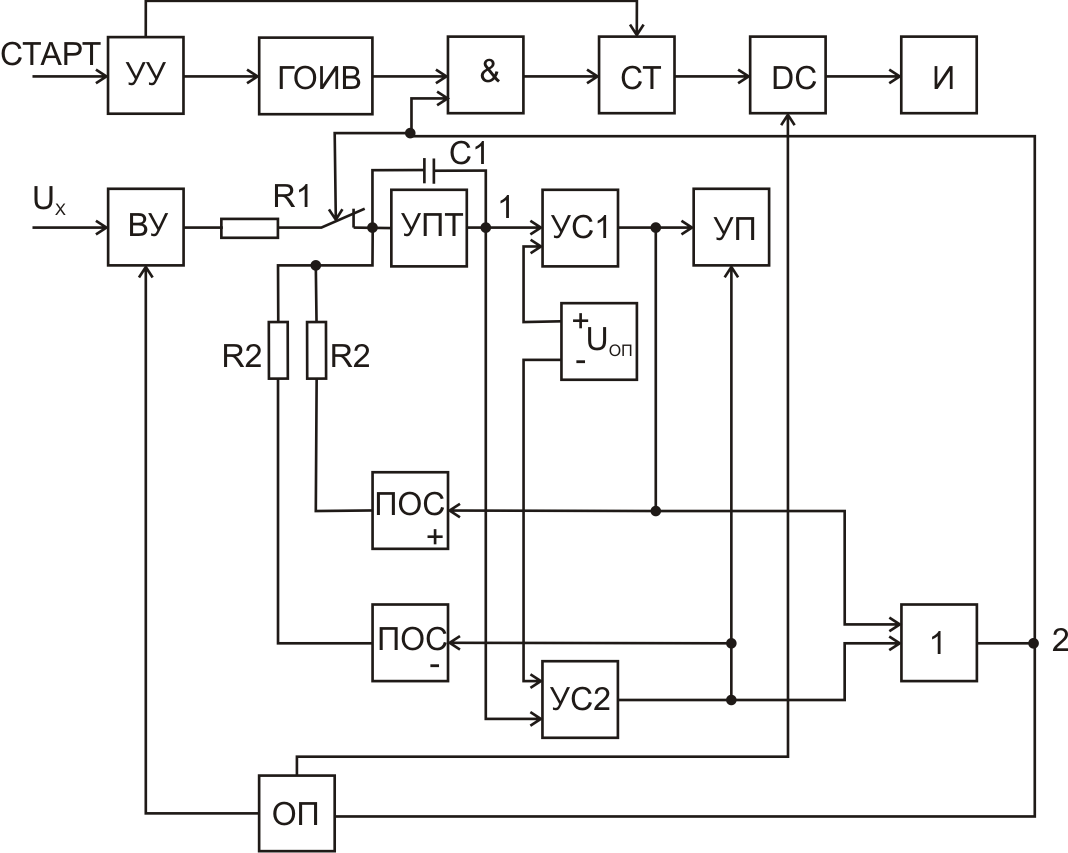
ГОИВ - генератор образцовых интервалов; УПТ – усилитель постоянного тока; ПОС – преобразователь обратной связи; УП – указатель полярности; ОП – ограничитель перегрузки
Рисунок 2.5 – Структурная схема вольтметра по частотно-импульсному методу
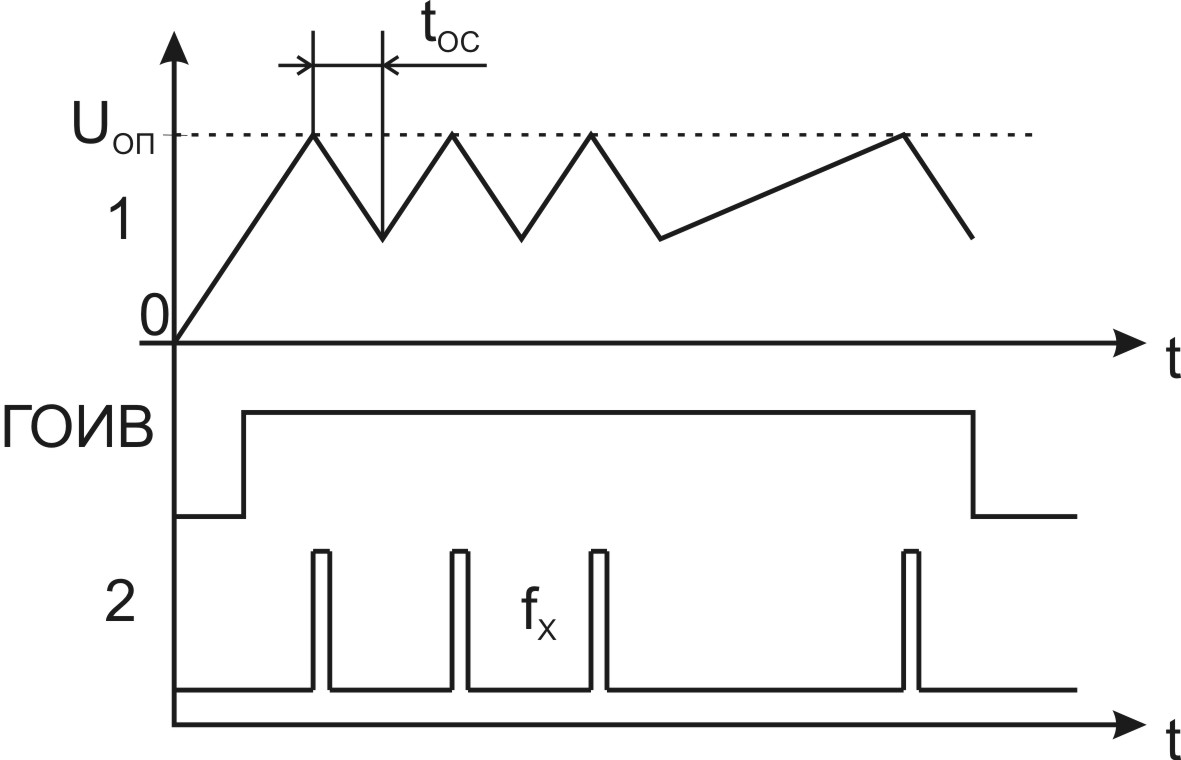
Рисунок 2.6 – Временные диаграммы, поясняющие работу частотно-импульсного вольтметра
Измерения начинаются с прихода сигнала «Старт» на УУ. Оно разрешает вырабатывать один эталонный импульс ГОИВ, а так же в самом начале сбрасывает счетчик в 0. Таким образом, ГОИВ разрешает проходить частоте с выхода элемента «ИЛИ» через элемент «И» на счетчик. Преобразователь напряжения в частоту работает постоянно, независимо от действий УУ. Напряжение UX, пройдя через ВУ, поступает на вход интегратора, который имеет постоянную времени τ = R 1 ·C1. В случае, если UX положительно, то напряжение на выходе интегратора увеличивается, если UX отрицательно, то уменьшается. И это происходит до тех пор, пока не сработает одно из устройств сравнения. В момент равенства напряжения на выходе интегратора с опорным напряжение, УС включает соответствующий преобразователь обратной связи на эталонный промежуток времени. Под действием этого блока напряжение на выходе интегратора изменяется в обратную сторону. На выходе преобразователя получается пилообразное напряжение, причем обратный ход напряжения имеет всегда одинаковый угол наклона и длительность. Таким образом, частота зависит только от первого этапа интегрирования, длительность которого в свою очередь зависит от входного напряжения. Основная погрешность подобных вольтметров определяется отношением сопротивлений R 2 / R 1, которое можно обеспечить очень точно. Еще менее влияет на точность нестабильность коэффициента усиления ВУ, нестабильность ГОИВ и нестабильность UОПОРН. Используя данный метод, удается строить вольтметры с погрешностью 0,005% и чувствительностью до 1 мкВ.
Метод с промежуточным преобразованием напряжения в фазу
На рисунках 2.7 и 2.8 показаны структурная схема вольтметра с промежуточным преобразование напряжения в фазу и временные диаграммы, поясняющие его работу

ФВ – фазовый вращатель; Ф1, Ф2 – устройство контроля перехода сигнала через 0
Рисунок 2.7 – структурная схема вольтметра с промежуточным преобразование напряжения в фазу
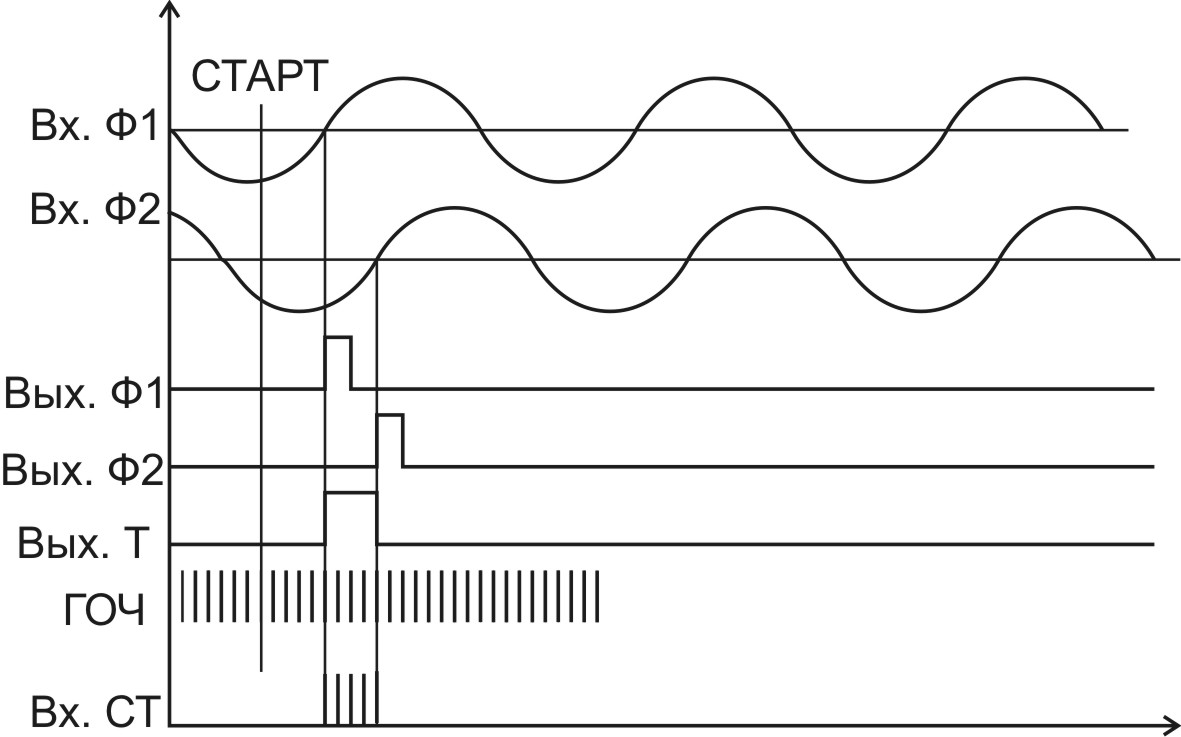
Рисунок 2.8 – Временные диаграммы, поясняющие работу вольтметра с промежуточным преобразование напряжения в фазу
Преобразование начинается с прихода сигнала «Старт». УУ снимает сигнал сброса со входа R-триггера. Опорное переменное напряжение, чаще всего синусоидальное (т.к. строить фазовращатель для синусоид проще), подается на устройство Ф1 и Ф2. Причем на Ф1 подается через электрически управляемый фазовращатель, сдвиг фазы в котором прямо пропорционален постоянному напряжению, в качестве которого выступает измеренное напряжение. Таким образом, устройства Ф1 и Ф2 будут срабатывать не одновременно. Разница в срабатывании по времени прямо пропорциональна фазовому сдвигу, т.е. UX. Сигналы с выходов Ф1 и Ф2 через элемент ИЛИ подаются на счетный вход Т-триггера. Получив первый сигнал, Т-триггер переключится в противоположное состояние, т.е. на его выходе установится 1, которая сообщает УУ о начале цикла измерения и разрешит прохождение импульсов с ГОИ на счетчик. Затем через элемент ИЛИ на вход Т придет второй импульс, который сбросит триггер в 0 и тем самым остановится процесс счета счетчика, а УУ поймет, что цикл измерения завершен. Т.е. счетчик насчитает число, прямо пропорциональное измеряемому напряжению.
В виду того, что фазовращатель изменяет фазу с учетом знака входного напряжения UX легко определить полярность по очередности срабатывания Ф1 и Ф2.
Погрешность данного метода определяется такими параметрами, как:
- стабильность ГОЧ;
- стабильность частоты опорного напряжения;
- линейность фазовращателя.
Данный метод имеет погрешность от 0,1-0,01%.