

Питання для самоконтролю
Що таке коефіцієнт трансформації і як він визначається експериментальним шляхом?
Що таке коефіцієнт корисної дії трансформатора?
З якого досліду визначають втрати потужності на перемагнічування сердечника трансформатора?
З якого досліду визначають втрати потужності на нагрів обмоток трансформатора? Чому?
Лабораторна робота №7
Дослідження з’єднання обмоток асинхронного двигуна
Мета роботи
Ознайомитись з конструкцією та принципом дії трифазного асинхронного двигуна з короткозамкненим ротором. Вивчити методику визначення початків і кінців обмоток статора і схему їх з’єднання в зірку і трикутник.
Тривалість заняття
Тривалість лабораторної роботи 4 години.
43
Обладнання, матеріали та інструменти
Асинхронний двигун, провідники, вимірювальні прилади, магнітний пускач.
Місце проведення заняття
Лабораторна робота проводиться в лабораторії електроприводу 7ма.
Загальні відомості
Двигун складається з двох основних частин – нерухомого статора та рухомого ротора. Статор має чавунний або силуміновий корпус та сердечник з пазами, набраний з окремих ізольованих листів електротехнічної сталі, товщиною 0,35 або 0,5 мм. В пази вкладають три обмотки (фази), які зсунуті в просторі відносно одна одної на кут 120°.

Рис. 7.1. Схема ввімкнення трифазного асинхронного електродвигуна „зіркою” і „трикутником”
Виводи обмоток вмонтованих в коробці, яка закріплена на корпусі статора і позначені наступним чином: початок першої фази – С1, кінець – С4, початок другої фази – С2, кінець – С5, початок третьої фази – С3, кінець – С6.
Ротор складається з вала і сердечника, в пази якого вкладається стержнева обмотка або заливається розплавлений алюміній.
Асинхронні двигуни є двох типів: з короткозамкненим та фазним ротором. Електродвигуни, в яких обмотка ротора замкнута кільцями і не має виводів, називають електродвигунами з короткозамкненим ротором. В сільськогосподарському виробництві використовуються, в основному, власне такі двигуни.
В паспорті електродвигуна вказуються дві напруги, наприклад, 220/380 В. Це означає, що при напрузі мережі 220 В обмотки статора з’єднують в „трикутник” (рис. 7.1.б), при 380 В – в „зірку” (рис. 7.1.а). Виконання схеми „зірка” і „трикутник” на клемній коробці показано відповідно на рис. 7.1.в,г.
Схематично двигун з обмотками статора та ротора зображено на рис. 7.2, де 1 – сердечник, на якому розміщено

Рис.7.2. Схематичне зображення асинхронного електродвигуна:
1 – магнітне осердя розташоване на статорі. Три обмотки W1, W2, W3; 2 – ротор
Виводи обмоток статора під’єднані до клем, які розташовані на стенді робочого місця. Живлення схеми здійснюється від чотирьохпровідної трифазної мережі 380/220 В, клеми якої розміщені також на стенді робочого місця. Для проведення досліджень необхідно мати вольтметр V та з’єднувальні провідники.
Послідовність виконання роботи
1. Ознайомитись з паспортними даними асинхронного двигуна і записати в протокол досліджень.
2. Визначити виводи обмоток. Для цього, згідно схеми рис. 7.3 необхідно довільну клему виводів обмоток статора з’єднати з клемою фази джерела живлення (наприклад, з клемою фази А). Клему нульового проводу джерела живлення з’єднати з однією із клем вольтметра. До другої клеми вольтметра під’єднати провідник і включити напругу живлення. Вільним кінцем провідника від вольтметра по черзі доторкатись до клем виводів обмоток статора. Клеми, між якими вольтметр покаже напругу будуть належати одній із обмоток. Тричі повторюючи дослід визначають виводи трьох обмоток статора. Нумерація обмоток (перша, друга, третя) – довільна.
3. Визначити початки і кінці обмоток. Для цього скласти схему (рис. 7.4,а). Подати на схему живлення протягом 2-3 сек. Вольтметр покаже напругу, якщо він під’єднаний до двох різнойменних виводів, тобто до початку і кінця двох обмоток статора і покаже нуль, якщо він з’єднаний з двома початками або двома кінцями тих же обмоток. Довільно позначивши одну з клем, що під’єднані до вольтметра (наприклад, початком) визначаємо початки і кінці двох обмоток. Наприклад, вольтметр, який під’єднаний до одмоток 2 і 3 (рис. 7.4,б) показав напругу. Тоді, прийнявши нижній вивід обмотки 2 за початок (тобто С2), одержимо, що нижній вивід обмотки 3 буде кінцем (С6), а верхні виводи цих же обмоток відповідно кінцем (С5) і початком (С3). Якщо вольтметр не показав напруги, то нижні виводи обмоток 2 і 3 будуть початками (С2 і С3), а верхні кінцями (С5 і С6). Для визначення початку і кінця обмотки дослід слід повторити, для чого напругу мережі подати в обмотку 2, а обмотки 1 і 3 з’єднати між собою аналогічно рис. 7.4. Визначити початок і кінець обмотки і враховуючи, що початок і кінець обмотки 3 вже відомі.
4. Скласти схему згідно рис. 7.5. Подати на схему живлення і визначити напрям обертання валу двигуна. Здійснити реверс, помінявши місцями під’єднання до клем мережі виводів двох любих обмоток. Користуючись амперметром виміряти струм І, який двигун споживає з мережі. Обчислити значення пускового струму за співвідношенням
![]() (7.1)
(7.1)
Визначити кількість пар полюсів двигуна, користуючись його паспортними даними (табличка на корпусі двигуна).
![]() , (7.2)
, (7.2)
Враховуючи, що в табличці вказана номінальна швидкість обертання ротора nн, визначити номінальне ковзання двигуна
![]() , (7.3)
, (7.3)
5. Скласти схему згідно рис. 7.6 „фальшива зірка”. Порівняти покази амперметра з його показами в попередньому досліді і зробити висновок (в письмовій формі) щодо можливих наслідків неправильного включення двигуна в мережу.
6. Скласти схему (рис. 7.7) під’єднання двигуна з використанням пускозахисної апаратури та перевірити її працездатність.

Рис. 7.3. Схема визначення виводів обмоток
 Рис.
7.4. Схема визначення початків і кінців
обмоток
Рис.
7.4. Схема визначення початків і кінців
обмоток

Рис. 7.5. Схема підєднання двигуна „зіркою”
Рис. 7.6 Схема підєднання двигуна „фальшива зірка”

Рис. 7.7. Схема підєднання двигуна до мережі
Зміст звіту
1. Назва роботи.
2. Мета роботи.
3. Порядок виконання лабораторної роботи.
4. Схема експериментальної установки.
5. Паспортні данні машин.
6. Висновки.
Питання для самоконтролю
1. З яких частин складається асинхронний двигун?
2. Які знаєте типи роторів асинхронного двигуна?
3. Як визначити швидкість обертового магнітного поля статора за заданою номінальною швидкістю обертання ротора?
4. До чого може привести неправильне під’єднання двигуна до мережі? Чому?
Лабораторна робота №8
МАНУАЛЬНЕ (РУЧНЕ) КЕРУВАННЯ АСИНХРОННИМ ЕЛЕКТРОДВИГУНОМ ЗА ДОПОМОГОЮ ЧАСТОТНОГО
ПЕРЕТВОРЮВАЧА АВВ ACS 150
Мета роботи
Ознайомитись із реалізацією мануального (ручного) керування асинхронним електродвигуном за допомогою частотного перетворювача АВВ ACS 150
Тривалість заняття
Тривалість лабораторної роботи 4 години.
Обладнання, матеріали та інструменти
Частотний перетворювач АВВ ACS 150, асинхронний електродвигун, прайс листи фірми АВВ, інструкція по використанню частотного перетворювача АВВ ACS 150.
Місце проведення заняття
Лабораторна робота проводиться в лабораторії електроприводу 7ма.
Загальні відомості
Будова
Перетворювач частоти (автоматичний регулятор частоти або інвертор) − цей пристрій, що перетворює вхідну напругу 220В/380 В частотою 50 Гц, у вихідну імпульсну напругу за допомогою ШІМ (широтно імпульсної модуляції), яка формує в обмотках двигуна синусоїдальний струм частотою від 0 Гц до 400 Гц. Таким чином, плавно збільшуючи частоту і амплітуду напруги, що подається на обмотки асинхронного електродвигуна, можна забезпечити плавне регулювання швидкості обертання валу електродвигуна
Основні можливості
Перетворювач частоти забезпечує плавний пуск і зупинку двигуна, а також дозволяє міняти напрям обертання двигуна.
Перетворювач частоти відображає на цифровому дисплеї основні парметри системи: задану швидкість, вихідну частоту, струм і напругу двигуна, вихідну потужність, момент, стан дискретних виходів, загальний час роботи перетворювача і ін.
Управління перетворювачем частоти можна здійснювати з вбудованої виносної цифрової панелі управління, або за допомогою зовнішніх сигналів. У другому випадку швидкість обертання задається аналоговим сигналом 0…10 В або 4…20 мА, а команди запуску, зупинки та зміни режимів обертання подаються дискретними сигналами. Можна відображати параметри системи у вигляді графіків на виносній графічній панелі управління.
Існує можливість управління перетворювачем частоти через послідовний інтерфейс (RS-232, RS-422 або RS-485) або від зовнішнього ПЛК з використанням спеціального протоколу (Profibus, Interbus, Device-Net, ModBus і т.д.).
Частотно-регульовані приводи
Регульований асинхронний електропривод або частотно-регульований привід складається з асинхронного електродвигуна і інвертора (перетворювача частоти), який виконує роль регулятора швидкості обертання асинхронного електродвигуна.

Рис. 8.1. Загальний вигляд частотного перетворювача:
1 − вихід охолоджуючого повітря через верхню кришку; 2 − вонтажні отвори; 3 − вбудована панель керування; 4 − вбудований потенціометр; 5 − підключення блока Flash Drop; 6 − гвинт заземлення фільтра (ЕМС); 7 − гвинт заземлення варистора (VAR); 8− підключення входів/виходів; 9 − Підключення мережевого живлення (U1, V1, W1), гальмівного резистора (BRK+, BRK-) і двигуна (U2, V2, W2); 10 − монтажна плата із затискачами для кабелів керування; 11 − монтажна плата із затискачами для силових кабелів; 12 − затискачі.
ABB ACS150 − це частотний перетворювач , який призначається для управління роботою низьковольтних електродвигунів з діапазоном потужностей від 0,37 до 4 кВт. Перетворювачі можуть комутувати одно і трифазні двигуни змінного струму. Загальний вигляд частотного перетворювача представлений на рис. 8.1., а схема на рис. 8.2.
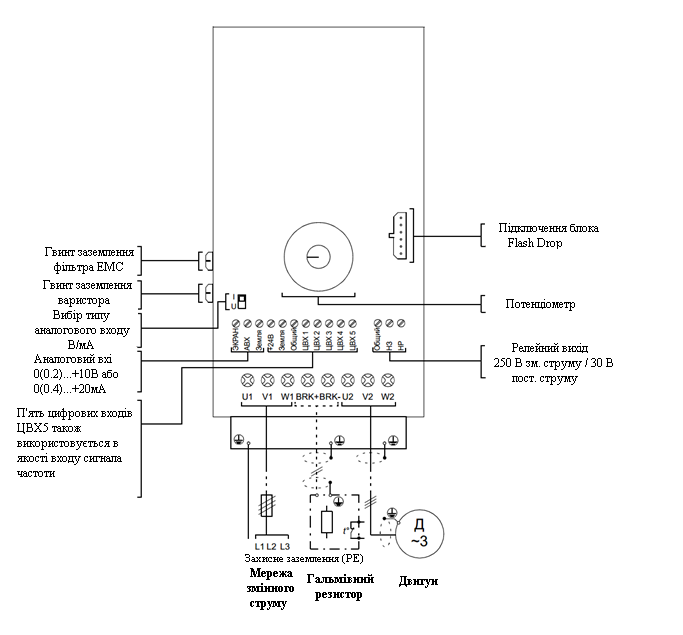
Рис. 8.2. Схема частотного перетворювача АВВ ACS150
Застосування частотно-регульованого електроприводу забезпечує:
• зміна швидкості обертання в раніше нерегульованих технологічних процесах;
• синхронне керування декількома електродвигунами від одного перетворювача частоти;
• заміна приводів постійного струму, що дозволяє знизити витрати, пов’язані з експлуатацією;
• створення замкнутих систем асинхронного електроприводу з можливістю точної підтримки заданих технологічних параметрів;
• можливість виключення механічних систем регулювання швидкості обертання (варіаторів, ремінних передач);
• підвищення надійності і довговічності роботи обладнання;
• велику точність регулювання швидкості руху, оптимальні параметри якості регулювання швидкості у складі механізмів, що працюють з постійним моментом навантаження (конвеєри, завантажувальні кулісні механізми і т.п.).
Частотні перетворювачі орієнтовані на управління роботою , що не вимагає абсолютно точного підтримки швидкості , моменту або іншого технологічного параметра , але допускає взаємодія з різними видами навантаження. Привід має вбудований рідкокристалічний дисплей , панель управління з дискретними і аналоговими органами управління . Це дозволяє легко і швидко провести настройку основних параметрів .
Вживаний інтерфейс взаємодії ACS150 у великій мірі уніфікований з інтерфейсами інших моделей виробника АВВ ( ACS350/ACS550/ACS800 ) , що дає можливість скоротити час, потрібний для налаштування електроприводу та навчання роботи з технологічним обладнанням , в якому він використовується. У конструкцію частотного перетворювача ACS150 входить гальмівний переривник , який організовує і управляє динамічне гальмування електромотора і фільтр, призначений для зниження рівня електромагнітних перешкод , які виникають при перехідних процесах роботи приводу . Комутатор АББ ACS150 має дуже розвинену та насичену комплектацію стандартного виконання . У нього входить: вбудована панель управління , затискачі для кріплення кабелів на монтажній платі , фільтр придушення електромагнітних перешкод , що поширюються по ланцюгах електроживлення , вбудований потенціометричний регулятор , попередньо встановлений чопер (гальмівний переривник ), додаткове технологічне напруга живлення 10 В. Для керування пристроєм за допомогою аналогових сигналів призначена плата з аналоговими входами рис. 8.3.
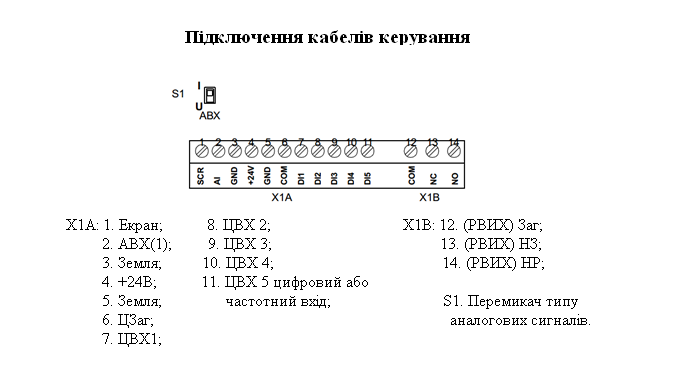
Рис. 8.3. Плата з аналоговими входами керування
Для підвищення надійності , захисту від впливу навколишнього середовища , підвищення надійності та терміну служби , всі друковані плати оброблені захисним шаром лаку.
Правила налаштування частотного перетворювача АВВ ACS 150.
Монтаж завжди слід планувати і виконувати відповідно до інструкцій, в іншому випадку це може спричинити пошкодження пристрою. Компанія АВВ не приймає на себе ніяких зобов’язань у разі виробництва монтажу з порушенням встановлених норм і правил.
Вибір двигуна
Виберіть одно чи трифазний асинхронний двигун у відповідності з таблицею Додаток А. У таблиці наведена потужність типового двигуна для кожної моделі приводу.
Вибір силових кабелів
Параметри кабелю живлення та кабелю електродвигуна повинні відповідати місцевим нормам і правилам.
Кабель повинен витримувати струм навантаження приводу.
Провідники кабелю повинні бути розраховані на температуру не менше 70 ° С в режимі тривалої роботи.
Провідність провідника захисного заземлення ( РЕ) повинна дорівнювати провідності фазного провідника (провідники повинні має однакову площу поперечного перерізу).
Кабель, розрахований на напругу 600В змінного струму , можна використовувати при напрузі живлення до 500В.
Провідність при підключенні двигуна необхідно використовувати симетричний екранований кабель (рис.8.4).
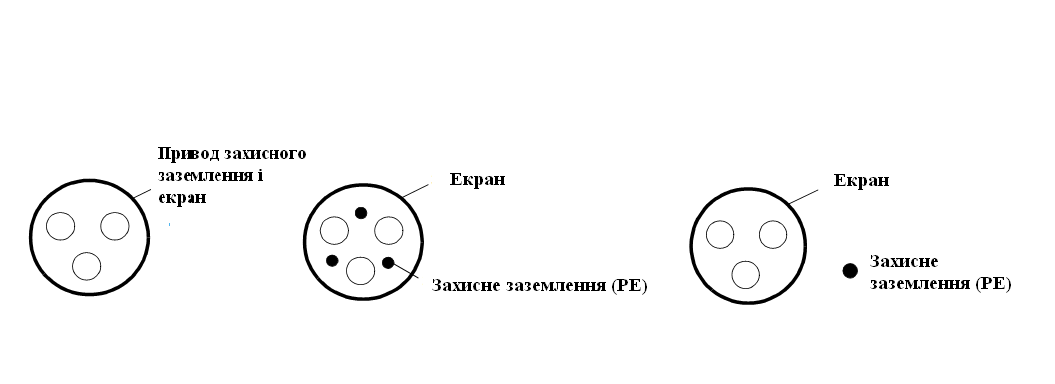
Рис. 7.4. Типи силових кабелів для підключення привода
Для подачі напруги живлення допускається використовувати чотирьох провідний кабель, проте рекомендується застосовувати симетричний екранований кабель.
У порівнянні з чотири провідним кабелем симетричний екранований кабель забезпечує менший рівень електромагнітного випромінювання всієї системи приводу, а також менше значення струму, що протікає через підшипники двигуна, і, відповідно, менше їх зношення.