

МІНІСТЕРСТВО АГРАРНОЇ ПОЛІТИКИ ТА ПРОДОВОЛЬСТВА УКРАЇНИ
ЛЬВІВСЬКИЙ НАЦІОНАЛЬНИЙ АГРАРНИЙ УНІВЕРСИТЕТ
Факультет механіки та енергетики |
Кафедра електротехнічних систем |
ЕЛЕКТРИЧНІ МАШИНИ,
ЕЛЕКТРОПРИВОД І
АВТОМАТИЗАЦІЯ
Методичні вказівки до виконання лабораторних робіт
для студентів за напрямом підготовки
6.050503 “Машинобудування”
денної форми навчання
Львів 2013
Рекомендовано до друку
методичною радою університету
Протокол №
від 201 р.
Укладачі: к. т. н., доцент Д. П. Гречин
ст. викл. І. М. Дробот
асист. А. Ф. Герман
Відповідальні за випуск: д. т. н., професор К. М. Василів
Рецензент: к. т. н., доцент В. Т. Дмитрів
© Львівський національний аграрний університет, 2013
З М І С Т
Лабораторна робота №1 Особливості побудови релейно-контакторних схем електроприводу ……………………………………………………..…….
|
4 |
Лабораторна робота №2 Вивчення конструктивних особливостей електричних апаратів …...
|
16 |
Лабораторна робота №3 Дослідження механічних характеристик двигуна постійного струму паралельного збудження ………………………….……….…….
|
26 |
Лабораторна робота №4 Дослідження механічних характеристик двигуна постійного струму незалежного збудження засобами програмного середовища Matlab ……………………………………………………………………….
|
30 |
Лабораторна робота №5 Дослідження механічних характеристик двигуна постійного струму послідовного збудження засобами середовища Matlab ………...
|
35 |
Лабораторна робота №6 Дослідження однофазного трансформатора ………………………....
|
39 |
Лабораторна робота №7 Дослідження з’єднання обмоток асинхронного двигуна …………....
|
43 |
Лабораторна робота №8 Мануальне (ручне) керування асинхронним електродвигуном за допомогою частотного перетворювача АВВ ACS 150 …….……..…
|
49 |
Лабораторна робота №9 Вивчення та налагодження найпростіших схем керування асинхронним двигуном ………………………………………………..…..
|
57 |
Лабораторна робота №10 Дослідження роботи трифазного асинхронного двигуна при живленні від однофазної мережі ……………………………………...….
|
60 |
Лабораторна робота №11 Дослідження робочих і механічних характеристик трифазного асинхронного двигуна з короткозамкненим ротором ………..…….……
|
63 |
Бібліографічний список …………………………………………….….
|
68 |
Лабораторна робота №1
Особливості побудови релейно-контакторних схем електроприводу
Мета роботи
Ознайомитись з основними особливостями побудови релейно-контакторних схем керування електроприводу, а також набути практичних навиків збирання електричних схем взаємних блокувань.
Тривалість заняття
Тривалість лабораторної роботи 4 години.
Обладнання, матеріали та інструменти
Кнопки керування, магнітні пускачі, контактори, провідники, теплові реле, автоматичні вимикачі.
Місце проведення заняття
Лабораторна робота проводиться в лабораторії електроприводу 7ма.
Загальні відомості
Функції систем автоматичного керування електроприводом
Керування це сукупність дій на керуючі пристрої для забезпечення пуску, підтримання режиму роботи електропривода у відповідності з вимогами технологічного процесу і його зупинки. Залежно від участі в цих діях людини (оператора) розрізняють не автоматичне (ручне), автоматизоване та автоматичне керування.
Неавтоматичним (ручним) називають керування, при якому оператор приймає безпосередню участь у всіх операціях по керуванню приводом (наприклад, комутація електричних кіл за допомогою апаратів ручного керування). Використання цих апаратів пов’язане з додатковими затратами часу на керування, що знижує продуктивність механізму, особливо при частих пусках або при регулюванні швидкості. Крім того, застосування апаратів ручного керування не забезпечує можливість дистанційного керування. В деяких потужних електроприводах ручне керування вимагає значних зусиль від людини для перемикання апаратів.
Автоматизованим називають керування, при якому оператор бере лише участь у створенні початкових імпульсів на вмикання-вимикання та зміну режиму роботи обладнання, а всі інші операції з керування здійснюються автоматично.
Автоматичним вважають таке керування, при якому основні операції здійснюються без участі оператора. Автоматичне керування електроприводами дає можливість підвищити продуктивність робочих машин, підвищити якість продукції, зменшити питомі витрати енергії на виробництво продукції, підвищити продуктивність праці та поліпшити умови роботи обслуговуючого персоналу, забезпечити оптимальний режим роботи обладнання. В системах автоматичного керування електроприводами використовуються: релейно-контактні апарати, серед яких основними є реле, контактори, шляхові перемикачі тощо; підсилювачі, перетворювальні пристрої і давачі електромашинні, електромагнітні, напівпровідникові тощо; безконтактні логічні елементи, мікропроцесори та мікро-ЕОМ.
Під системою автоматичного керування електроприводом розуміють сукупність механічних, електромеханічних, напівпровідникових та інших елементів, за допомогою яких здійснюється керування. Системи автоматичного керування бувають розімкненими і замкненими.
Розімкненою називають таку систему автоматичного керування, при якій із зміною збурюючої дії (наприклад, навантаження на валу двигуна) змінюється раніше заданий режим роботи електропривода і не відновлюється без втручання оператора.
Замкненою називають таку систему автоматичного керування, при якій із зміною збурюючої дії заданий режим роботи електропривода не змінюється. Заданий режим підтримується керуючими діями системи керування, що створюються засобами зворотного зв'язку.
У сільськогосподарському виробництві використовуються в основному розімкнені системи автоматичного керування.
Підтримання струму в колі статора і ротора або якоря двигуна, моменту, швидкості обертання в заданих межах здійснюється відповідними перемиканнями електричних кіл, зміною опору пускових і гальмівних резисторів, регулюванням напруги мережі живлення. В деяких випадках робоча машина з електроприводом є частиною замкненої системи автоматичного регулювання вихідної величини об'єкта керування (температури, вологості, тиску, рівня тощо). Відповідно розрізняють наступні принципи автоматичного керування.
Керування у функції часу полягає в тому, що перемикання електричних кіл, зміна опору пускових і гальмівних резисторів або напруги здійснюється в певні, наперед задані проміжки часу. В схемах керування застосовують реле часу, які здійснюють вмикання відповідного контактора.
Прикладом автоматичного керування електроприводом у функції часу є керування пуском трифазного асинхронного двигуна з перемиканням обмоток із «зірки» на «трикутник». Двигун спочатку вмикається в мережу з обмотками, з'єднаними «зіркою», а через певний час за командою реле часу система керування перемикає обмотки на «трикутник». При цьому система не контролює ні величини пускового струму, ні швидкості ротора та момент перемикання.
Керування у функції струму здійснюється за допомогою реле мінімального струму, які вмикають контактори при зниженні струму двигуна до заданого значення.
Керування у функції швидкості здійснюється за допомогою реле швидкості, або реле, які реагують на зміну інших величин, які перебувають в прямій залежності від швидкості ЕРС у двигунів постійного струму або частоти струму ротора у асинхронних двигунів. Для вимірювання ЕРС, реле напруги приєднують до затискачів якоря, а реле частоти струму вмикають у коло ротора.
Керування електроприводом у функції шляху полягає у тому, що при досягненні приводним механізмом заданого положення шляховий вимикач перемикається, внаслідок чого приводний механізм або зупиняється, або реверсується.
Керування у функції регульованого параметра полягає в тому, що давачі (один або декілька) системи автоматичного керування вимірюють заданий параметр і видають сигнал на зміну режиму роботи привода. Наприклад, в системі автоматичного керування вентиляційною установкою у функції температури давач вимірює температуру повітря у тваринницькому приміщенні і при відхиленні її від заданого значення регулятор подає команди на зміну швидкості обертання двигунів вентиляторів.
Вказані принципи керування є лише окремими функціями, які повинна виконувати система керування.
Будь-яка система автоматичного керування (САК) електроприводом виконує кілька функцій, які залежать від прийнятого технологічного процесу та вибраної системи електропривода. При цьому технологічний процес приймається за основу при виборі САК.
У сільському господарстві системи автоматичного керування електроприводом найчастіше виконують такі функції.
Пуск електродвигуна та його зупинку. Цю функцію виконують всі без винятку САК з тією різницею, що це може бути прямий пуск, перемиканням обмоток статора із «зірки» на «трикутник», із введенням опорів в коло ротора чи статора, пуск при зниженій напрузі, пуск у два ступені.
Регулювання швидкості електропривода зміною підведеної напруги, перемиканням числа пар полюсів, введенням опору в коло ротора, зміною частоти струму тощо.
Реверсування з витримкою часу або без неї, з електричним гальмуванням або без нього.
Електричне гальмування електропривода: противмиканням, динамічне, рекуперативне.
Захист електроприводів та приводних механізмів від коротких замикань, перевантажень та інших анормальних режимів.
Сигналізація стану системи окремими сигнальними лампами або мнемосхемами технологічного процесу.
Здійснення відповідної послідовності пуску та зупинки електропривода та блокувань: пуск і зупинка електроприводів потокових ліній, блокування неправильних дій оператора.
Автоматичне підтримання швидкості або її зміна за відповідним законом.
Стабілізація контрольованого параметра на заданому рівні.
Синхронізація руху окремих елементів механізму чи агрегату.
Слідкування за сигналами, які подаються на вхід системи від датчиків, та їх відпрацювання.
Чим більше функцій виконує САК, тим ширше зона її застосування. Одночасно зростає складність схеми керування.
Наприклад, система автоматичного керування скреперною установкою УС-12 згідно з наведеним переліком виконує функції 1, 3, 5, 6, 7; а схема керування вентиляційною установкою «Клімат4М» виконує функції 1, 2, 5, 6,7, 8,11, тобто має більше можливостей для автоматизації.
Правила виконання електричних схем
Залежно від основного призначення розрізняють схеми структурні, функціональні, принципіальні, з'єднань, підключень, загальні, розміщення та об'єднані. В електроприводах найчастіше використовують схеми структурні, функціональні, принципіальні та з’єднань.
Структурні схеми визначають основні функціональні частини електропривода, їх зв'язок між собою та призначення. Ці схеми передують розробці інших схем і використовуються для загального ознайомлення з електроприводом. Функціональні частини електропривода зображують у вигляді прямокутників, з'єднаних лініями зв'язку із стрілками, які показують напрям ходу процесу. Назву елементів вказують всередині прямокутників. В регульованих електроприводах для їх аналізу і синтезу всередині прямокутників записують передаточні функції елементів.
Функціональні схеми пояснюють процеси, які протікають в окремих функціональних елементах електропривода або установки в цілому. Використовуються ці схеми для вивчення принципу роботи, а також при налагоджені, контролі та ремонті. Функціональні елементи електропривода на цих схемах зображують у вигляді умовних графічних позначень або прямокутників. Вони повинні мати найменування, позначення або тип. Зв'язки між елементами та напрям передавання дії вказують стрілками.
При проектуванні електроприводів використовують також функціональні схеми робочих машин та агрегатів, на яких зображають технологічні зв'язки між окремими робочими органами або машинами, що необхідно для розробки електричної схеми керування електроприводом.
Принципіальними називають схеми керування, які визначають повний склад елементів електроустановок і зв'язки між ними і дають уявлення про принцип роботи установки. Використовуються ці схеми для вивчення принципу дії установки, а також при ремонті, налагодженні та контролі.
Принципіальні схеми креслять без дотримання масштабу, як правило, рознесеним способом, коли елементи одного пристрою можуть бути розміщені в різних колах схеми відповідно до їх електричних з'єднань. Фактичне розміщення окремих частин електроустановки не враховують або враховують наближено. Всі елементи схеми зображують у вигляді умовних графічних позначень згідно з вимогами Єдиної системи конструкторської документації. Складні пристрої, які мають свою внутрішню схему (регулятори, перетворювачі напруги, частоти струму, програмні пристрої тощо), дозволяється зображувати у вигляді прямокутника з зовнішніми колами. Елементи зображують у вимкненому стані.
При рознесеному способі зображення умовні позначення елементів або їх складових частин, які входять до одного кола, зображують послідовно один за одним на одній прямій, а окремі кола одне під одним. Лінії зв’язку між ними повинні бути найкоротшими і мати мінімальну кількість перетинів.
Кожний елемент принципіальної електричної схеми повинен мати буквено-цифрове умовне позначення, яке складається з латинських букв і цифр однакової висоти (наприклад, автоматичний вимикач QF1; електромагнітний пускач КМ1, КМ2, КМЗ; теплові реле КК1, КК2, ККЗ тощо). Позиційні позначення на схемі проставляють поряд з умовним графічним позначенням з правого боку або над ним.
На принципіальних електричних схемах допускається зображувати механічні зв'язки між елементами пунктирними або подвійними лініями.
Принципіальні схеми керування електроприводами складаються з силових (головних) кіл (ліва частина) та кіл керування (права частина). До силових кіл відносять кола якоря, статора і ротора електродвигунів та силові кола перетворювачів електричної енергії. В колах керування знаходяться котушки контакторів і реле, допоміжні контакти контакторів і апаратів захисту, кнопки керування, пристрої сигналізації.
Для зручності читання схеми та розробки за нею схеми з'єднань ділянки кіл принципіальної електричної схеми маркують. Маркування здійснюють від вводу джерела живлення, де вказують напругу мережі постійного струму або напругу і частоту струму мережі змінного струму. Вхідні ділянки силового кола трифазного змінного струму маркують L1, L2, LЗ, N; однофазного змінного струму L1, N; L2, N; LЗ, N; постійного струму L+, L.
Ділянки електричного кола, розділені контактами апаратів, котушками реле, контакторів, обмотками машин, резисторами та іншими елементами повинні мати різне маркування (L1.1, L2.1, LЗ.1; L1.2, L2.1, LЗ.1 і т.д.), а ділянки кола, що проходять через рознімні, розбірні або нерозбірні контактні з'єднання однакове маркування.
Послідовність маркування повинна бути у напрямку від джерела живлення до споживача, а ділянки кола, що розгалужуються, маркують зверху вниз у напрямку зліва направо. Маркування проставляють біля кінців або в середині ділянки кола при вертикальному зображенні кола зліва, при горизонтальному над ним. Кола керування, захисту та сигналізації маркують послідовними арабськими цифрами зліванаправо, зверхувниз.
Дані про елементи схеми повинні бути записані в таблиці переліку елементів, яка розміщується над основним надписом графічної частини або на окремому аркуші. Елементи схеми записують у алфавітному порядку їхніх умовних позначень.
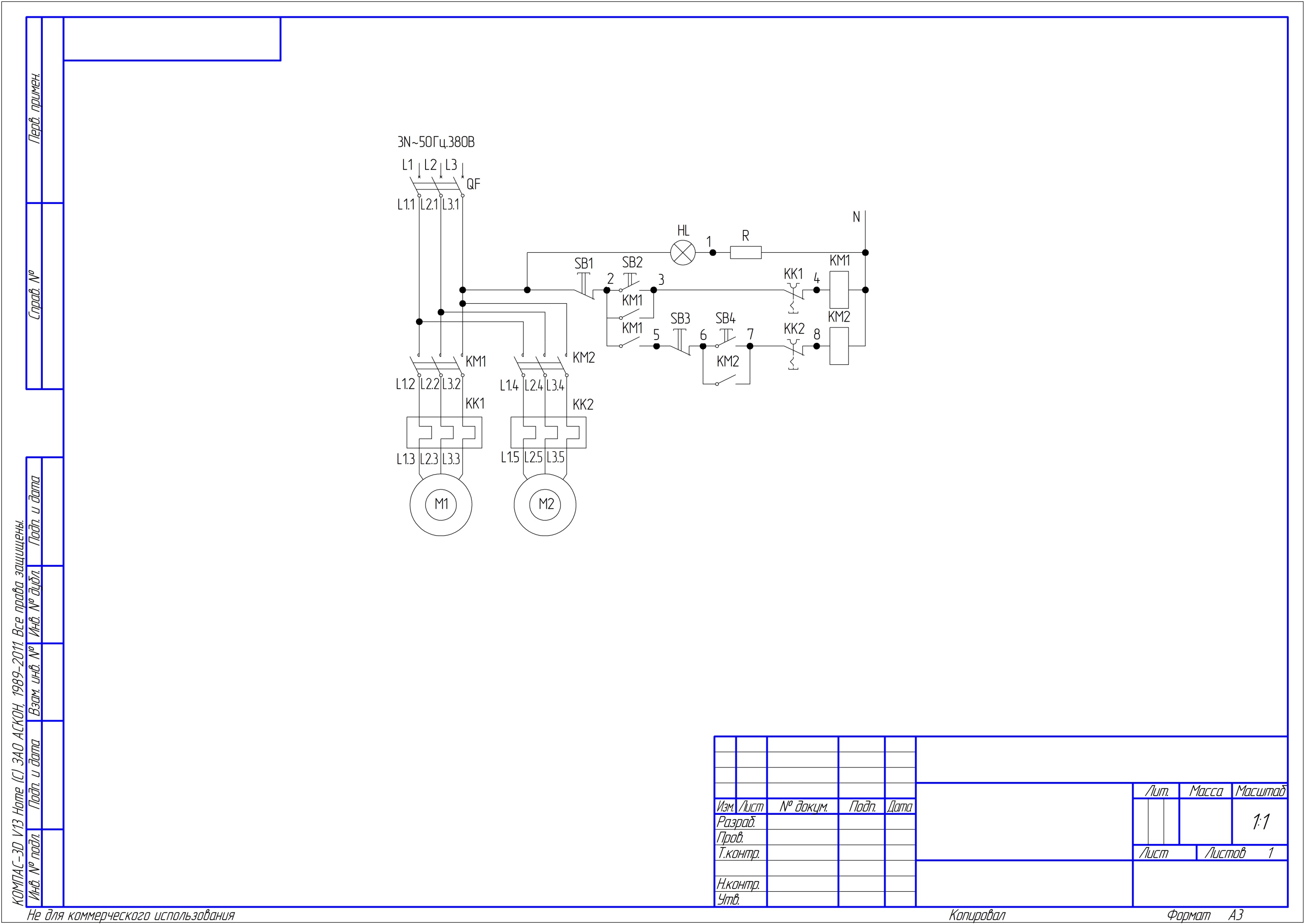
Рис. 1.1. Принципіальна електрична схема керування гноєприбиральним транспортером ТСН-ЗБ
Приклад виконання принципіальної електричної схеми керування електроприводом показаний на рис. 1.1.
Схемою з’єднань називають схему, на якій показані з’єднання всіх складових частин електроустановки, а також проводи та кабелі, якими здійснюються ці з’єднання, місця їх приєднання і вводу.
Схема з’єднань складається на основі принципіальної електричної схеми і повинна бути узгоджена з нею.
Апарати і прилади на схемі з’єднань зображують у вигляді прямокутників або фігур, що зовнішніми обрисами нагадують відповідний апарат, а їх елементи у вигляді умовних графічних позначень чи прямокутників. Розміщення пристроїв повинно відповідати дійсному розміщенню їх у шафі керування. Біля графічних позначень треба вказувати позиційні позначення елементів відповідно до принципіальної схеми.
Проводи, що ідуть в одному напрямку, допускається зливати в одну лінію, а при підході до апарата кожний провід треба зображати окремою лінією. Місце приєднання до апарата позначають кружечком з номером.
Номери проводів проставляють біля обох кінців їх зображень. Допускається біля обох кінців ліній вказувати адресу з’єднань.
Приклад виконання схеми з’єднань показаний на рис. 1.2.
Типові вузли і блокування у схемах керування електроприводами
Типові вузли схем керування електроприводами показані на рис. 1.3. При короткочасному вмиканні двигуна (поштовхом) натискують на кнопку SВ, при цьому спрацьовує пускач КМ (рис. 1.3 а). При перевантаженні спрацьовує теплове реле КК, контакт якого розмикається у колі котушки пускача КМ (рис. 1.3 б). Світлову сигналізацію про вмикання пускача, подачу напруги на схему, та вмикання двигуна забезпечують схеми, показані відповідно на рис. 1.3 в, г, д.
Д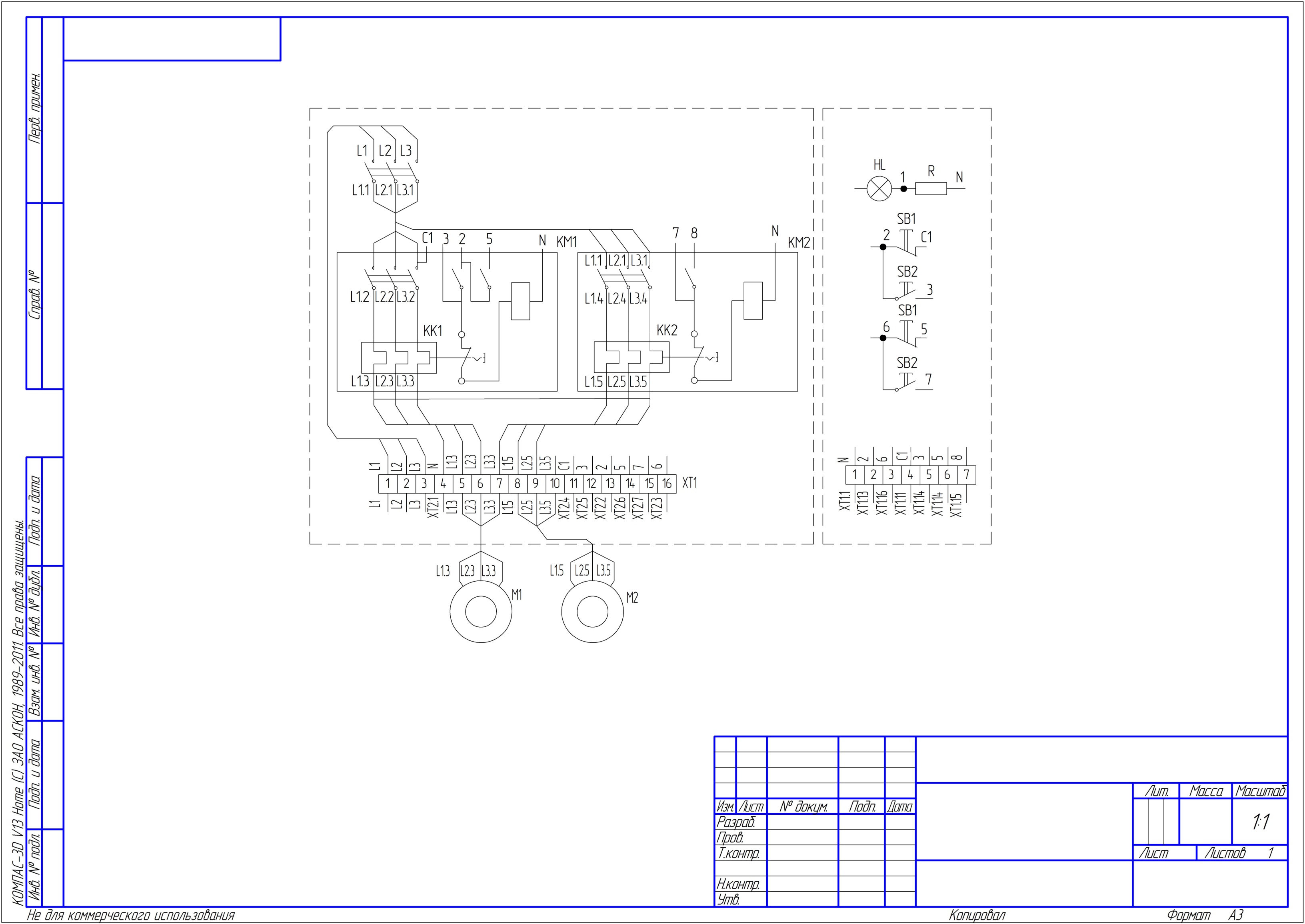 ля
запобігання виходу з ладу електрообладнання
та підвищення надійності його роботи
застосовують різні види захисту та
захисні блокування.
ля
запобігання виходу з ладу електрообладнання
та підвищення надійності його роботи
застосовують різні види захисту та
захисні блокування.
Рис. 1.2. Схема з’єднання станції керування гноєприбиральним транспортером ШАП 5901Ж-03А
Захист від коротких замикань (максимальний струмовий захист) забезпечується: в силових колах плавкими запобіжниками (рис. 1.4 а, б) та автоматичними вимикачами з електромагнітними розчіплювачами (рис. 1.4 в, г), в колах керування — максимально-струмовим захистом силового кола (при потужності двигуна до 10 кВт) або власними плавкими запобіжниками чи автоматичними вимикачами.
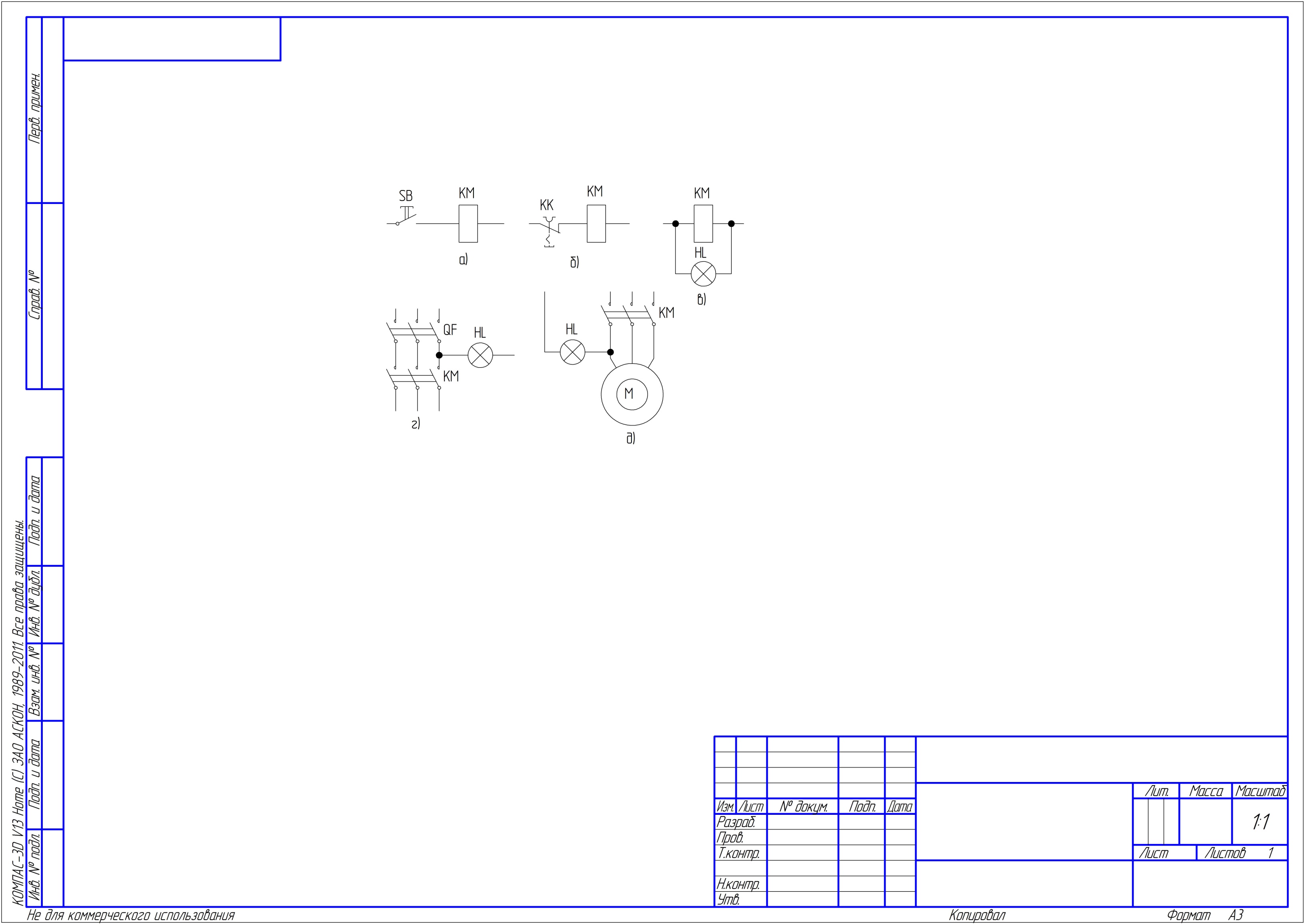
Рис. 1.3. Типові схеми керування електродвигунами:
а - поштовх; б - електромагнітний пускач з тепловим реле; в - сигнал «Пускач увімкнено»; г - світлова сигналізація про подачу напруги на схему;
д - сигнал «Двигун увімкнено»
Захист двигунів від перевантажень забезпечується при тривалому режимі роботи — тепловими реле або тепловими розчіплювачами автоматичних вимикачів (рис. 1.5 а), при повторно-короткочасному режимі роботи — за допомогою максимальних струмових реле КА (рис. 1.5 б). Реле часу вводять у схему для запобігання вимикання двигуна реле струму КА при пуску. На час пуску контакт реле часу КТ шунтує розмикаючі контакти КА1, КА2, КАЗ.
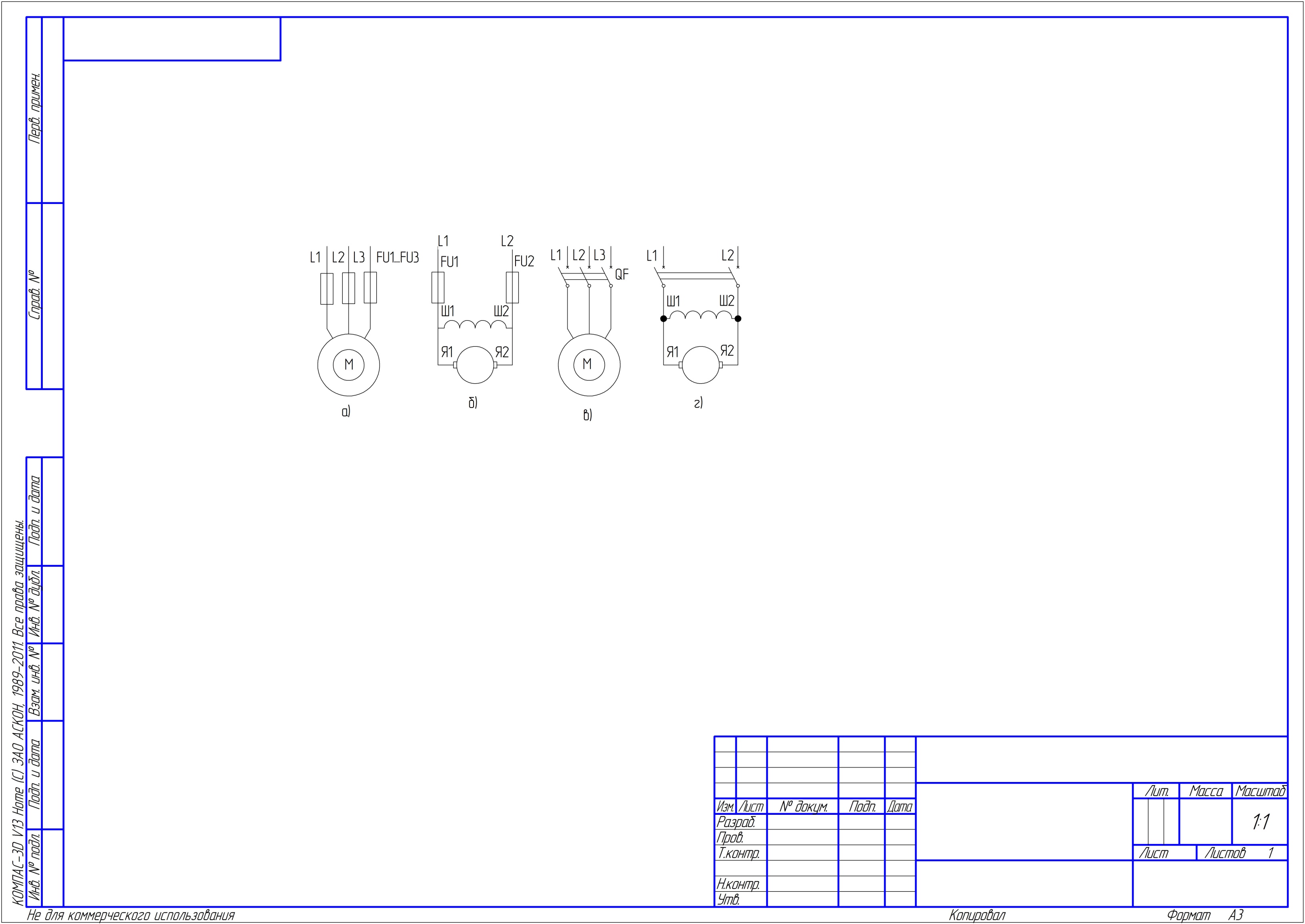
Рис. 1.4. Вузли схем захисту електродвигунів від коротких замикань:
а, б - плавкими запобіжниками; в, г - автоматичними вимикачами
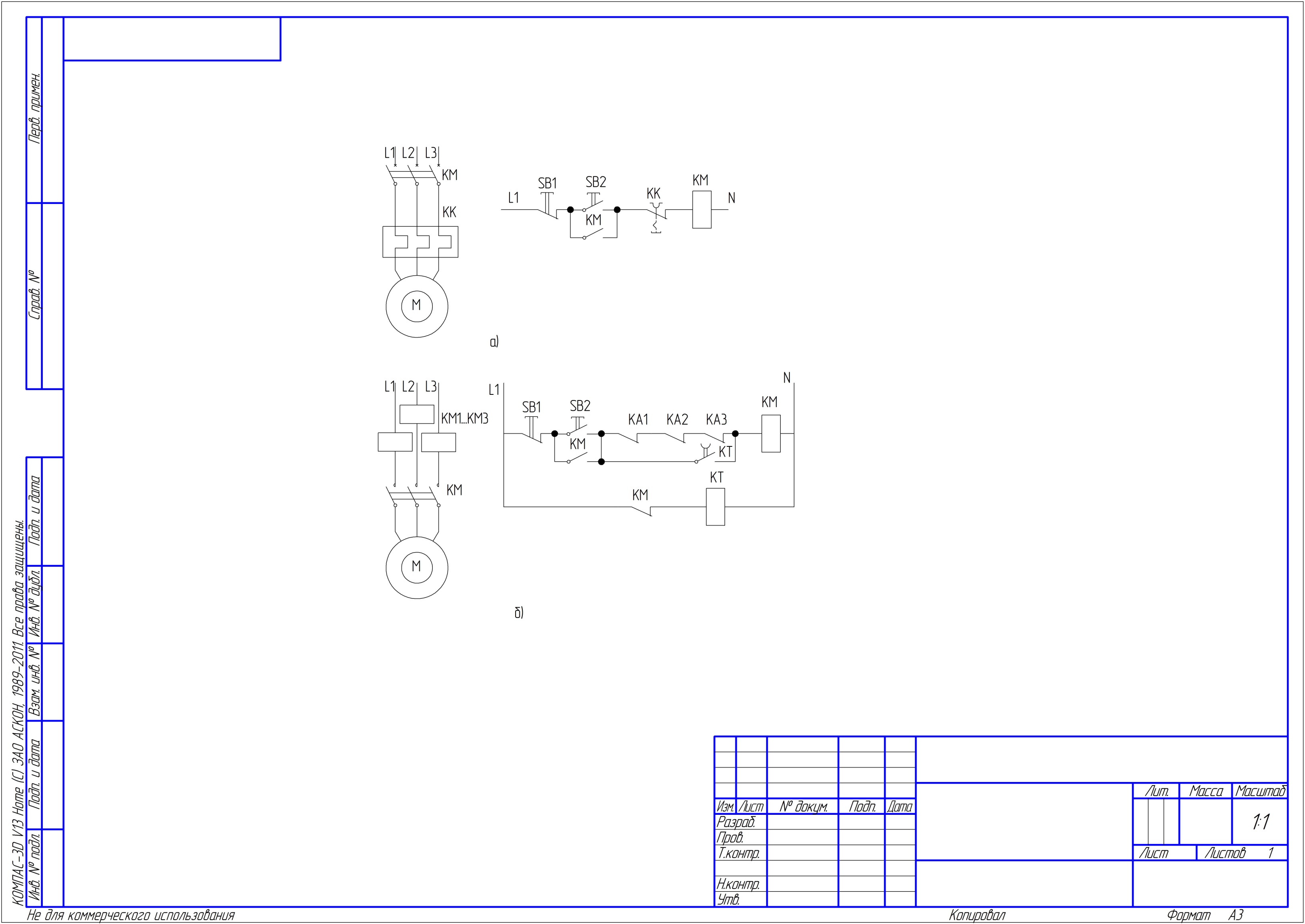
Рис. 1.5. Вузли схем захисту електродвигунів від перевантажень: а — тепловими реле; б — реле струму
Захист від обриву поля, тобто при обриві кола збудження двигуна постійного струму і синхронного двигуна, здійснюється реле мінімального струму (рис. 1.6).
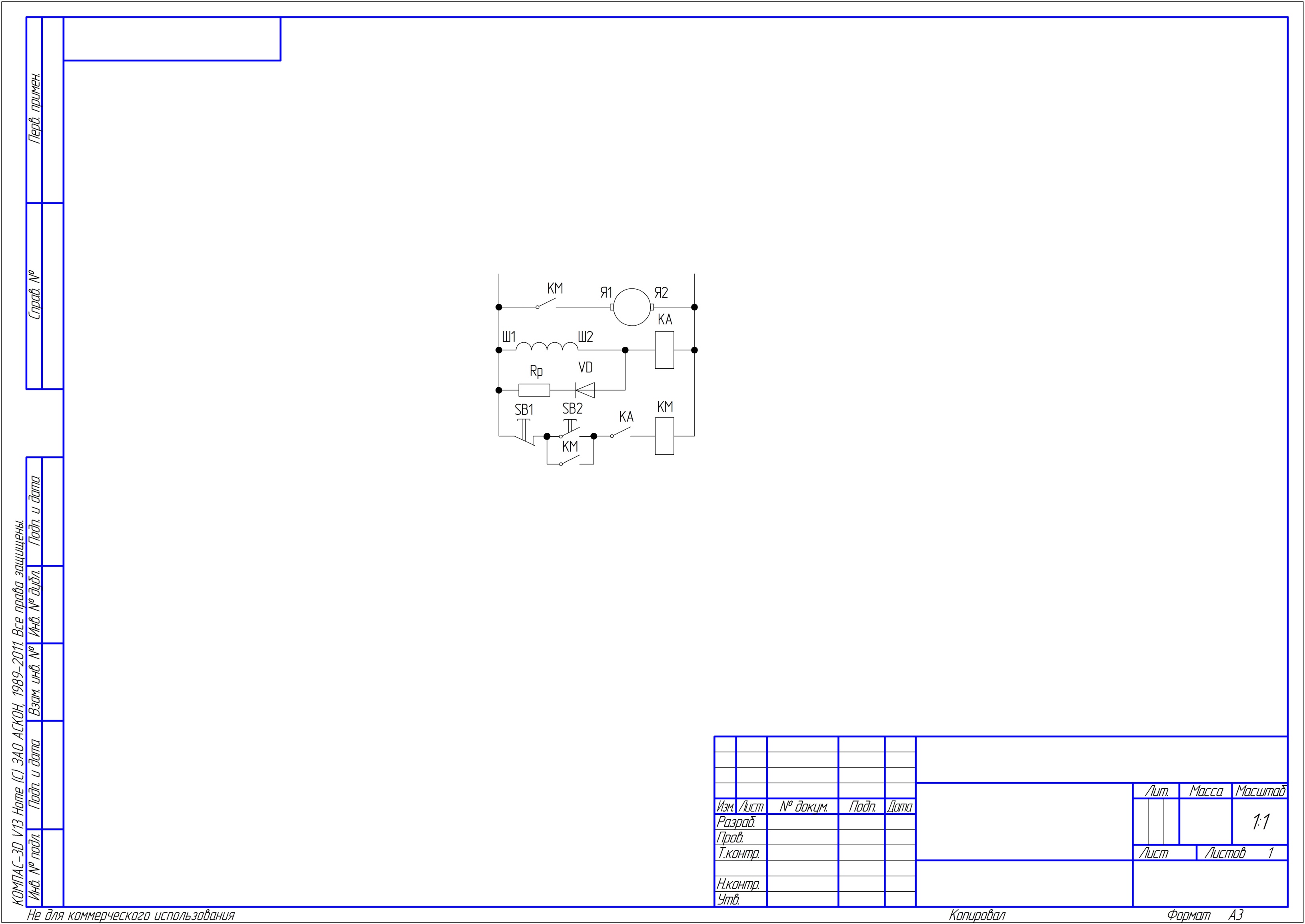
Рис. 1.6. Вузли схем захисту електродвигуна постійного струму від обриву і перенапруги на обмотці збудження
Котушка реле КА вмикається послідовно із обмоткою збудження, і реле замикає свій контакт при струмі, близькому до номінального. При зникненні або недопустимому зниженні струму збудження двигуна контакт реле струму КА в колі котушки пускача KM розмикається, внаслідок чого вимикається двигун.
Захист від перенапруги на обмотці збудження двигуна постійного струму після її вимкнення здійснюється розрядним опором Rp який приймається: при напрузі 220 В (6...8) Rозд, при напрузі 110 В (3...5) Rозд. Для запобігання втрат енергії в розрядному опорі при роботі двигуна у коло Rp вмикається діод VD (рис. 1.6)
Захисні електричні блокування підвищують надійність роботи електроприводів, запобігають хибним і аварійним увімкненням апаратів, пристроїв, робочих машин. В схемах автоматичного керування електроприводами найчастіше застосовують блокування що забезпечують задану послідовність вмикання і вимикання кількох двигунів, не допускають одночасного вмикання контакторів або інших апаратів, запобігають мимовільному пуску двигунів (нульове блокування), нещасним випадкам і аваріям, які можуть виникнути внаслідок неправильних дій обслуговуючого персоналу
Для забезпечення заданої послідовності вмикання електродвигунів М1 і М2 (рис. 1.7) послідовно з котушкою електромагнітного контактора КМ2, який забезпечує керування електродвигуном М2, вмикають допоміжний замикаючий контакт контактора КМ1 призначеного для керування двигуном М1 (рис. 1.7 а). При цьому вмикання допоміжного двигуна М2 буде можливим лише після замикання допоміжного контактора КМ1, тобто після вмикання двигуна М1.
Для забезпечення одночасного вмикання двигунів М1 і М2 допоміжний замикаючий контакт контактора КМ1, призначеного для керування двигуном М1, вмикають послідовно з котушкою контактора КМ2, призначеного для керування двигуном М2, а допоміжний замикаючий контакт контактора КМ2 - паралельно кнопці «Пуск» SВ2 (рис. 1.7 б). При натисканні на кнопку SВ2 спрацьовує контактор КМ1 і своїми головними контактами вмикає двигун М1 в мережу, а допоміжним замикаючим контактом подає живлення на котушку контактора КМ2. Контактор КМ2 спрацьовує і вмикає двигун М2. Якщо контактор КМ2 з певних причин не спрацює, при відпусканні кнопки SВ2 зупиниться і двигун М1, Одночасне вимикання двох двигунів здійснюється кнопкою «Стоп» SВ1.
Щоб не допустити одночасного вмикання контакторів КМ1 і КМ2 (рис. 1.7, в), необхідно послідовно з котушкою контактора КМ1 увімкнути допоміжний розмикаючий контакт контактора КМ2, а послідовно з котушкою контактора КМ2 увімкнути допоміжний розмикаючий контакт контактора КМ1. При цьому, якщо один з контакторів спрацює, розмикається його допоміжний контакт у колі котушки другого контактора і вмикання другого контактора стає неможливим. Таке блокування здійснюють також за допомогою здвоєних кнопок (рис. 1.7, г), що мають розмикаючий і замикаючий контакти. При натисканні на кнопку SВ2 її замикаючий контакт замикає коло котушки контактора КМ1, а розмикаючий розмикає коло котушки контактора КМ2. Якщо ж натиснути на кнопку SВЗ, то, навпаки, замкнеться коло котушки контактора КМ2 і розімкнеться коло котушки контактора КМ1. При одночасному натисканні на обидві кнопки розмикаються кола котушок обох контакторів, і вони вимикаються. Одночасна робота двох контакторів неможлива.
Р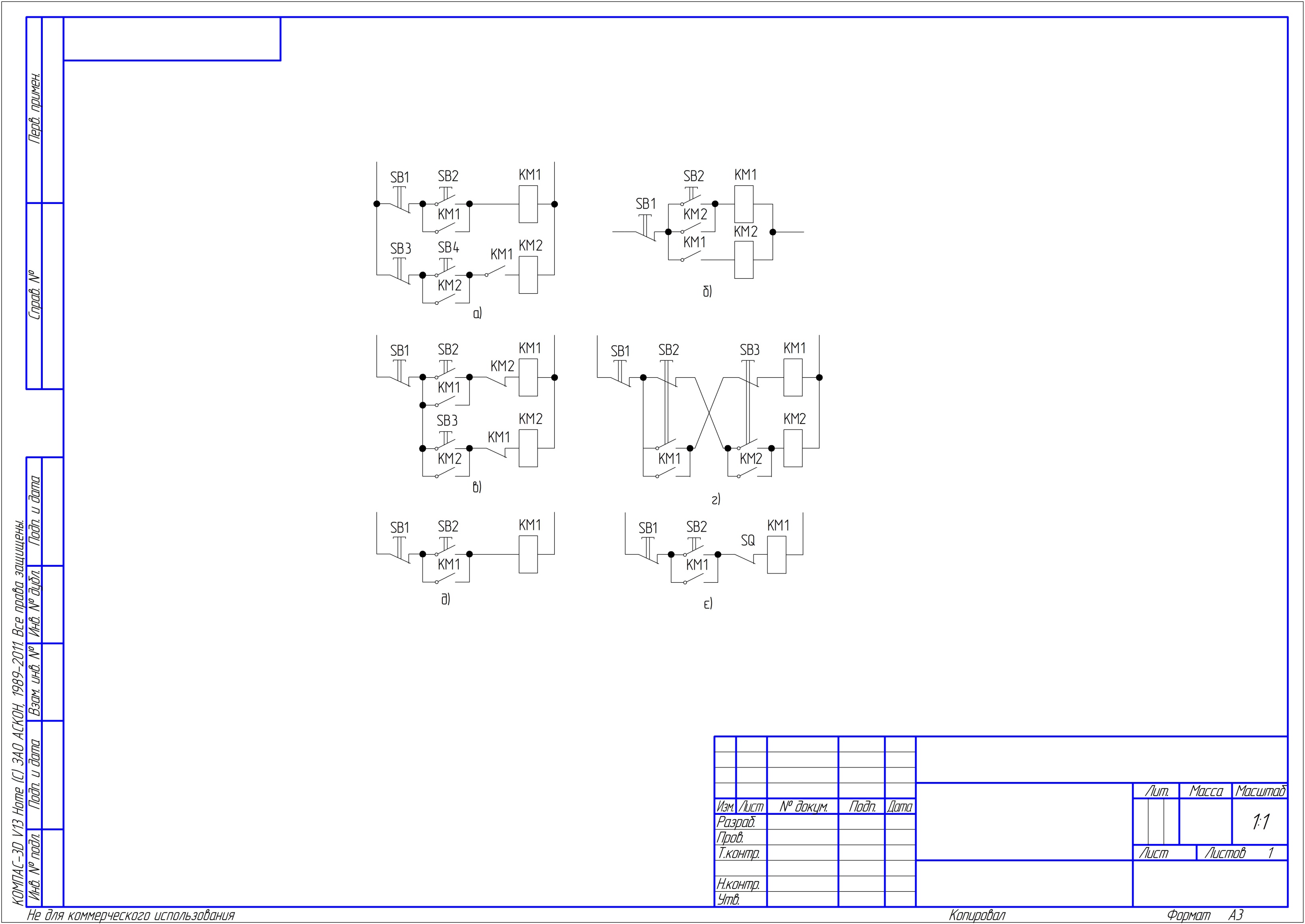 ис.
1.7. Блокувальні зв’язки у схемах керування
електроприводами:
а
пуск у заданій послідовності; б
одночасний
пуск; в,
г
одночасна
робота двигунів неможлива; д
мимовільний пуск двигуна неможливий;
є
обмеження руху робочої машини
ис.
1.7. Блокувальні зв’язки у схемах керування
електроприводами:
а
пуск у заданій послідовності; б
одночасний
пуск; в,
г
одночасна
робота двигунів неможлива; д
мимовільний пуск двигуна неможливий;
є
обмеження руху робочої машини
Для забезпечення нульового блокування, тобто захисту від мимовільного вмикання електродвигуна при появі зниклої напруги, замикаючий допоміжний контакт контактора вмикають паралельно кнопці «Пуск» (рис. 1.7 д). При нормальній напрузі мережі натисканням на кнопку «Пуск» SВ2 спрацьовує контактор КМ1, який головними контактами вмикає двигун, а допоміжним шунтує кнопку «Пуск». Після цього кнопка SВ2 повертається у вихідне положення, а живлення котушки контактора відбувається через його допоміжний контакт. При значному зниженні або зникненні напруги контактор повертається у вихідне положення, вимикаючи головними контактами двигун, і розмикає допоміжний контакт, увімкнений паралельно кнопці «Пуск». Після відновлення напруги запустити двигун можна лише натиснувши на кнопку «Пуск» SВ2.
Обмеження переміщення робочого органу або машини в цілому у просторі здійснюється за допомогою кінцевого вимикача SQ, увімкненого у коло котушки контактора КМ1 (рис. 1.7 є). При спрацюванні кінцевого вимикача SQ розмикається коло котушки контактора КМ1, який вимикає двигун.
Послідовність виконання роботи
Ознайомитись з теоретичною частиною.
Скласти схеми вказані викладачем.
Представити складену схему на перевірку викладачу.
Перевірити роботу схеми.
Скласти звіт.
Захистити лабораторну роботу.
Зміст звіту
Номер роботи.
Тему роботи.
Мету роботи.
Послідовність виконання роботи.
Короткий опис загальних відомостей.
Схеми.
Висновки по роботі.
Питання для самоконтролю
Що таке керування?
Що таке автоматизоване керування?
Що таке автоматичне керування?
Які функції найчастіше виконують системи автоматичного керування електроприводом?
Які функції виконують структурні, функціональні схеми?
Зобразити схеми захисту електродвигунів від коротких замикань.
Зобразити блокувальні зв'язки у схемах керування електроприводами.
Лабораторна робота № 2
ВИВЧЕННЯ КОНСТРУКТИВНИХ ОСОБЛИВОСТЕЙ ЕЛЕКТРИЧНИХ АПАРАТІВ
Мета роботи
Вивчення конструктивних особливостей та основних технічних характеристик електричних апаратів захисту та керування електроприводами і розподілу електроенергії низької напруги.
Тривалість заняття
Тривалість лабораторної роботи 4 години.
Обладнання, матеріали та інструменти
Автоматичні вимикачі, магнітні пускачі, контактори, пакетні вимикачі і перемикачі, запобіжники, контролери, теплові реле, реле часу, поляризаційні реле, проміжне реле, геркони.
Місце проведення заняття
Лабораторна робота проводиться в лабораторії електроприводу 7ма.
Загальні відомості
Апаратура управління і захисту
Управління електротехнічними пристроями здійснюється з допомогою різної апаратури. У залежності від призначення її можна поділити на дві великі трупи: комутаційні апарати (високовольтні вимикачі, роз'єднувачі, контактори і ін.) і захисні апарати (автоматичні повітряні вимикачі, плавкі запобіжники, різні реле і розрядники для захисту від перенапруг).
В трифазних системах у відповідності до послідовності чергування фаз шини повинні бути зафарбовані в такі кольори: фаза А жовтий, фаза В зелений, фаза С червоний; нейтральні шипи: при ізольованій нейтралі білий: при заземленій нейтралі чорний. При постійному струмі позитивна шина зафарбовується червоним, негативна шина синім, а нейтральна - білим кольором.
Для надійної роботи електричних апаратів важливим є умови виконання контактів. Вони можуть бути жорсткі (нероз’ємні), наприклад приєднання провідників до виводів машини або апарата; ковзаючі між нерухомими і рухомими струмопровідними частинами; комутаційні -- у вимикаючих апаратах.
Відключення електричного кола не може бути миттєвим. Розриваючи коло струму, неминуче виникає більша чи менша електрорушійна сила самоіндукції; під дією цієї е.р.с сумісно з напругою електричної мережі проміжок між контактами, що розходяться, пробивається і виникає електрична дуга. Висока температура в ній може викликати швидке руйнування або зварювання контактів. Особливо небезпечна дія дуги в апаратах високої напруги при вимиканні струмів короткого замикання.
Відключення електричних кіл перемінного струму суттєво спрощується, тому що перемінний струм періодично проходить через нульове значення, що приводить до гасіння дуги. Вимикачі змінного струму повинні бути сконструйовані так. щоб упередити повторне запалення дуги, після того як вона погасла при проходженні через нуль змінного струму.
Значно важче відключення електричних кіл постійного струму високої напруги. Вимикачі для нього струму повинні бути розраховані на поглинання значної енергії, що виділяється при тривалому горінні дуги постійного струму.
Тепловий захист електроустановок
Простим способом відключення струмів кроткого замикання є використання їх теплової дії в приладі захисту. Таким приладом є плавкий запобіжник. В ньому основним вимикаючим елементом є плавка вставка змінна частина запобіжника, яка розплавляється під тепловою дією струму при збільшенні його в захищуваному колі більше визначеного значення. По суті не коротка ділянка захищуваного електричного кола, яка відносно легко руйнується тепловою дією електричного струму.
Плавлення вставки не повинно супроводжуватись виникненням електричної дуги в запобіжнику, отже, плавка вставка повинна мати довжину, що відповідає напрузі захищуваного електричного кола; по цій причині на запобіжниках крім номінального струму вказується також і напруга.
Існує багато різних конструкцій плавких запобіжників для напруг до 250 В і струмів приблизно до 60 А повсюдно застосовуються запобіжники коркового типу. Також використовують запобіжники серії ПН (рис.2.1).

Рис. 2.1. Запобіжники серії ПН-2:
а − загальний вигляд і деталі; б − розріз; 1- корпус; 2 − плавка вставка; 3 − контакти; 4 − гвинти; 5 − азбестові прокладки
Для теплового захисту ліній високої напруги використовуються трубчаті запобіжники. Трубка не дає розбризкуватися розплавленому металу, а електрична дуга, що утворилася при плавленні дроту у середині трубки, швидко розривається завдяки тязі повітря в трубці.
Треба розрізняти захист електротехнічних установок від коротких замикані, і захист від тривалих перевантажень.
Тепловий принцип захисту використовується також і більш досконалих приладах теплових реле. В цих реле для спрацювання пристрою за звичай використовується біметалічний елемент, який складається із двох механічно скріплених пластин з різним температурним коефіцієнтом розширення. На рис. 2.2 показана принципова схема влаштування теплового реле.
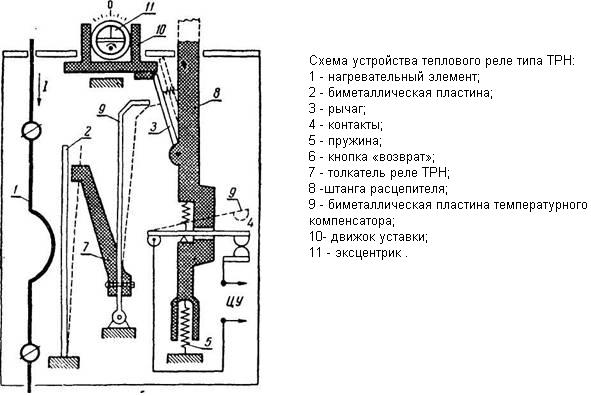
Рис. 2.2. Будова теплового реле типу ТРН:
1 − нагрівальний елемент; 2 − біметалева пластина; 3 − ричаг; 4 − контакти; 5 − пружина; 6 − кнопка «повернення»; 7 − тяга; 8 − штанга розчіплювала; 9 − біметалева пласти температурного компенсатора; 10 − тяга вставки; 11 − ексцентрик
Одначе теплові реле із-за значної теплової інерції не забезпечують захисту від струмів короткого замикання, тому необхідним доповненням теплового реле є плавкий запобіжник або автоматичний вимикач.
Автоматичні повітряні вимикачі
Плавкі запобіжники захищають електродвигуни і решта промислових пристрої від струмів короткого замикання, а від тривалих перевантажень вони надійно захистити не можуть. Тому в потужних електротехнічних установках крім плавких запобіжників встановлюється автоматичний захист.
Простим пристроєм для автоматичного захисту від пошкоджень за ненормального режиму роботи в установках з робочою напругою до 1 кВ є автоматичні повітряні (не масляні і не з стисненим повітрям) вимикачі, їх часто називають автоматами.
Ці апарати можуть, захищати установку не тільки при перевантаженні струмом. Вони здійснюють вимикання електричних кіл автоматично при порушенні нормальних робочих умов, при чому у залежності від типу автомату це вимикання відбувається або коли певна електрична величина переходить установлене граничне значення (максимальні і мінімальні автомати), або коли змінюється напрям передачі енергії (автомати зворотної потужності). Крім того, існують багато різних автоматів спеціального призначення. Для дії на защіпку вимикаючого механізму в автоматах застосовуються електромагнітні, теплові і комбіновані розщіплювачі. У випадку комбінованого розщіплювача електромагнітний і тепловий елемент можуть незалежно вимикати автомат.
Електромагнітний розщіплювач діє миттєво, і тому при ньому нема необхідності в плавких запобіжниках.

Рис. 2.3. Будова автоматичного вимикача:
1 − ручка взвод; 2 − механізм вимкнення; 3 − контакти; 4 − клеми підключення; 5 − біметалева пластина теплового розчіплювала; 6 − регулювальний гвинт; 7 − котушка електромагнітного розчіплювала; 8 − дугогасильна камера
Найбільш розповсюдженим автоматичним повітряним вимикачем є автомат максимального струму. Коли струм захищуваного електричного кола досягає граничною значення, котушка втягує сталеве осердя і защіпка звільнює пружину, яка розриває контакти і таким чином, вимикає електричне коло. Конструктивні оформлення цих автоматів різноманітні.
Автомати максимального струму застосовуються в освітлювальних мережах житлових приміщень взамін плавких запобіжників. Вмикання автомата здійснюється рукою, при чому часто автомат забезпечують вільним розщіплювачем, завдяки якому перевантажене електричне коло відключається, навіть якщо електромонтер, що вмикає йото, утримує ручку автомата в положенні ввімкнено. Часто автомати забезпечують приспосібленням для регулювання граничного струму, при якому відбувається вимикання. Точність налаштування автомата на певний граничний струм не порівняно вище, чим при захисті плавкими запобіжниками.
Щоб уникнути відключення установки при короткочасному збільшенні струму, не небезпечним для установки (наприклад, пускового струму двигуна) автомати деколи забезпечують пристроєм витримки часу (приспосібленням, яке створює певний проміжок часу між дією струму на автомат і відключенням кола). Крім годинникового механізму для витримки часу в автоматах з електромагнітним розщіплювачем застосовують також масляне і повітряне гальмо і т. п.
Автомат мінімального стуму застосовується, коли електричне коло повинно бути відімкнене, якщо в ньому або в одній із його віток струм зменшиться нижче граничного значення. Котушка утримує осердя і защіпку до тих пір, поки струм в котушці не понизиться до певного значення.
Реле і релейний захист
Реле − це електричний апарат, в якому при плавній зміні управляючого (вхідного) параметра до визначеного наперед заданої величини відбувається скачкоподібна зміна керованого (вихідного параметра). Хоча б один цих параметрів повинен бути електричним.
Загальна основна характеристика реле це характеристика управління, що виражає зв’язок між управляючою (вхідна величина) фізичною величиною 1 і керованою величиною U (рис 2.4).
Рис 2.4. Характеристика управління реле
При збільшенні керуючої величини до певного значення, що зветься параметром спрацювання (зокрема, струм спрацювання реле), керована величина не зміниться, тобто поки І < ІС, керована величина U = 0. Коли управляюча величина досягне ІС , виконавча частина реле здійснює скачкоподібну зміну керованої величини U (наприклад, вмикає чи вимикає електричне коло). Подальше збільшення І не змінює U. Не впливає на U і зменшення управляючої величини, поки І більше певного значення, що зветься параметром повернення ІП (зокрема, струм повернення). Коли управляюча величина досягає значення І = ІП виконавча частина реле зменшує керовану величину до U = 0.
Відношення ІП/ІС = kП зветься коефіцієнтом повернення реле. У залежності від принципу дії і конструкції реле коефіцієнт повернення може мати значення kП = 0,98…0,3.
По області застосування реле можна розділити на реле для схем автоматики, для управління і захисту електроприводу і захисту енергосистем. По принципу дії реле діляться на електромагнітні, поляризовані, теплові, індукційні, напівпровідникові і ін.
У залежності від вхідного параметра реле можна розділити на реле струму, напруги, потужності, частоти і інших величин. Реле може реагувати не тільки на вхідний параметр, але й на різницю значень (диференціальні реле), зміну знаку або швидкості зміни вхідного параметра.
За принципом дії на кероване електричне коло реле діляться на контактні і безконтактні. Вихідним параметром безконтактного реле є різка зміна опору, увімкненого в кероване електричне коло. Розімкненому стану контактів контактного реле відповідає великий опір керованого електричного кола безконтактного реле.
За способом вмикання реле розрізняють первинні і вторинні. Первинні реле вмикають в кероване електричне коло безпосередньо, вторинні − через вимірний трансформатор.
Час з моменту подачі команди на спрацювання до моменту початку зростання вихідного параметру зветься часом спрацювання. Цей час залежить від конструкції реле, схеми його вмикання і вхідного параметра. Час з моменту подачі команди на відключення до досягнення мінімального значення вихідного параметра зветься часом відключення. Для контактних реле цей час складається із двох інтервалів − час відпускання і час горіння електричної дуги.
Основною вимогою до реле захисту електроприводу є висока швидкодія (tcп ≤ 0,05 с), широке регулювання струму спрацювання, вібростійкість і ударостійкість.
В схемах захисту і автоматики часто потрібна видержка часу між спрацюванням двох або декількох апаратів. Для створення витримки часу служать реле часу.
Для схем автоматичного управління електроприводами при великій частоті вмикань потрібні реле з високою механічною зносостійкістю − до (5…10)·106 спрацювань. Потрібні витримки часу знаходяться в границях 0,25…10 с. До цих реле не ставляться вимоги відносно високої стабільності витримки часу. Розкид часу спрацювання може досягати 10%. Реле повинні працювати у виробничих умовах за наявності інтенсивних механічних впливів.
Час спрацювання реле з електромагнітним сповільнювачем дуже малий. Цей час складає 0,05…0,2 с за наявності короткозамкненого витка і 0,02...0,05 с за його відсутності. Тому можливості електромагнітного сповільнення при спрацюванні реле обмежені і щоб одержати більші витримки часу використовують спеціальні схеми вмикання електромагнітних реле.
Для одержання витримки часу 1 с і більше, необхідно використовувати відпускання якоря реле часу з електромагнітним сповільнювачем (короткозамкненим витком). Регулювання витримки часу реле при відпусканні може здійснюватись плавно і ступіньчато (грубо).
Для отримання великих витримок часу використовують реле з пневматичним сповільнювачем (від 0,4 до 180 с з точністю ±10%), з сповільнювачем типу анкерного механізму (від 7 до 17 с з точністю ±10%) або моторне реле (20…30 хв).
Поляризовані реле можуть допускати частоту перемикань до 200 за секунду з зміною струму.
Контактні осердя герконових реле виготовляються із феромагнітного матеріалу з високою магнітною проникливістю (пермалой) і вварюються в скляний герметичний балон, який заповнений чистим азотом (0,4…0,6)·103 Па, що запобігає окисленню контактів. Управління контактами здійснюється магнітним полем.
Контактори, магнітні пускачі і контролери
По суті контактор подібний до реле, тому що він представляє собою електромагнітний вимикач, який спрацьовує при замиканні або розмиканні оперативного струму. На відміну від реле контактори розраховуються на комутування великих струмів, деколи при високій напрузі. Вони застосовуються для управління потужними приймачами електроенергії великими електродвигунами, нагрівальними пристроями і т. д. Тому електромагніти контакторів повинні маги великі значення ходу контактів і сили тяги.
Управління контакторами здійснюється оперативним струмом допоміжного електричного кола, причому це управління може виконуватися простим натисканням одної кнопки в електричному колі оперативного струму (кнопкове управління).
На рис 2.5. показано улаштування контролера постійного струму.

Рис 2.5. Контактор постійного струму:
1 − нерухомий головний контакт робочого струму; 2 − дугогасна камера; 3 − рухомий головний контакт; 4 − важелі; 5 − пружина; 6 − сталевий якір; 7 − повертальна пружини; 8 − осердя котушки; 9 − котушкою контактора; 10 − контакти електричного кола оперативного струму (допоміжні контакти)
Електромагнiтний механізм поворотного типу складається з осердя 1 з котушкою 2, якоря 3 і повертальної пружини 4. Осердя 1 має полюсний наконечник, необхідний для збільшення магнітної провідності робочого зазору електромагнiту.
Немагнiтна прокладка 5 служить для передбачення залипання якоря. Силовий контактний вузол складається з нерухомого 6 і рухомого 7 контактів. Контакт 7 шарнірно закрiплений на важелі 8, зв’язаному з якорем 3 і притисненим до нього пружиною 9. Замикання головних контактів 6 і 7 відбувається з прослизанням і перекочуванням, що забезпечує очистку контактних поверхонь від окисiв і нагару. При спрацьовуваннi електромагнiтного механізму окрім головних контактів перемикаються допоміжні контакти блокувального контактного вузла 10. При розімкненнi головних контактів 6 і 7 між ними виникає електрична дуга, струм якої підтримується за рахунок ЕРС самоiндукцiї в обмотках електродвигуна, який вимикається. Для інтенсивного гасіння електричної дуги служить дугогасна камера 2. Вона має дугогасну решітку у вигляді тонких металевих пластин, що розривають дугу на короткі ділянки. Пластини інтенсивно відводять тепло від дуги і гасять його. Однак при великій частоті вмикання контактора пластини не встигають охолонути і ефективність дугогасiння падає.
Контактор перемінного струму входить як складова частина в магнітний пускач, який представляє собою комплектний пристрій управління, що складається із одного або декількох електромагнітних контакторів, теплових реле і кнопок управління.
Контролери представляють собою комутаційні апарати, що дають можливість простим поворотом ручки або маховичка не тільки увімкнути чи вимкнути електричне коло, але й здійснити складні перемикання елементів схеми управління електричних машин і апаратів (наприклад, пуск в хід, регулювання швидкості обертання, реверсування, гальмування). Застосування контролера значно спрощує роботу обслуговуючого персоналу (водія електровоза, робочого біля верстату). На рис 2.6. показано улаштування барабанного контролера.
Контактні пальці ізольовані один від одного, і до них приєднані провідники, що з’єднують контролер з керованою установкою. При повертанні валу 3 сегменти 4 в певній послідовності доторкаються до контактних кілець 2, і в той спосіб здійснюється необхідне перемикання в управляючих електричних колах установки. Барабанний контролер може безвідмовно працювати лише при невеликому числі вмикань за годину.
Значно краще працює кулачковий контролер (командоконтролер). Основною його деталлю є комутуючий пристрій кулачкового типу − кулачковий контактний елемент. Схема подібного пристрою, що комутує два електричних кола, показана на рис 2.7.
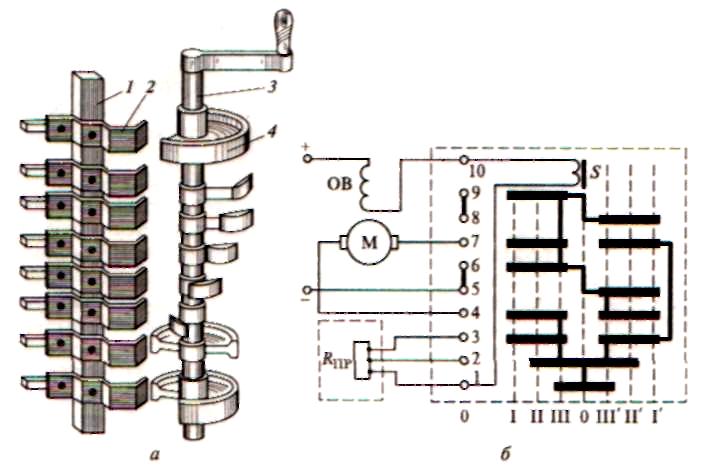
Рис 2.6. Барабанний контролер:
1 − Нерухома ізольована основа; 2 − пальці (нерухомі контакти); 3 − ізольований обертовий вал; 4 − сегменти (відрізки мідних кілець)
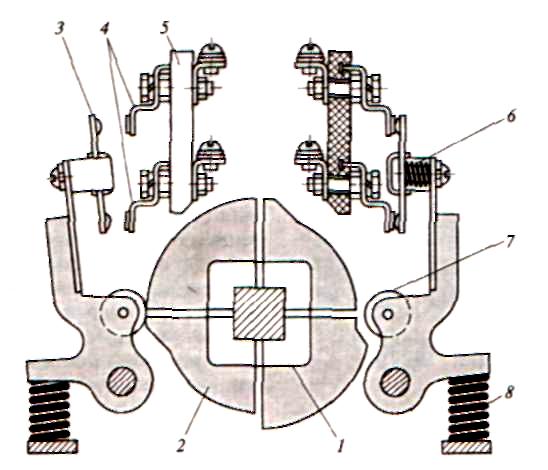
Рис 2.7. Схема кулачкового контролера:
1 − Управляючий вал; 2 − ізоляційні кулачки;
3 − Рухомі контакти мостикового типу; 4 − нерухомі контакти; 5 − ізолююча плита 6 − дві пружини; 7 − ролик; 8 − пружина
Кінцевий вимикач розриває головне електричне коло або коло управління двигуном в результаті натискання управляючого упору (кулачка). Ці вимикачі мають важливе значення в підіймальних пристроях.
Шляхові вимикачі комутують електричні кола під дією управляючих упорів (кулачків), коли контрольований об’єкт проходить певні точки свого шляху.
По суті це варіанти кулачкових командоапаратів, в ряді випадків суттєво спрощені.
Вивчення апаратури необхідно починати з зовнішнього огляду та ознайомлення з паспортними даними. Після встановлення основних характеристик апарата слід відшукати йото опис у каталозі і дальше вивчення проводити, використовуючи детальні відомості, наведені в каталозі чи рекомендованій літературі.
В деяких випадках вивчення апарата повинно супроводжуватись поділом його на окремі частини. За вказівкою викладача певні типи апаратів слід вивчати більш детально і включити одержані відомості у звіт. Так, наприклад, при ознайомленні з пусковим реостатом слід визначити призначення кожного з елементів (максимального реле, контактора, економічного опору). Вникнути у робочу схеми, звернути увагу на особливості конструкції комутатора і елементів опорів.
При ознайомленні з електромагнітними реле часу постійного струму слід вивчити конструкцію, принцип дії, способи регулювання витримки часу. Всі відомості, одержані в результаті вивчення апаратів у натуральному вигляді та за даними каталогу, необхідно вміти пояснити, користуючись загальними принципами і теорією роботи даного апарата.
Послідовність виконання роботи
Розглянути апаратуру, запропоновану викладачем, з метою ознайомлення з конструкцією кожного апарата і визначення його фунцій.
Записати паспортні дані.
Зарисувати електричну і конструктивну схему деяких апаратів, вказати їх призначення, технічні характеристики конкретного апарата і його окремих елементів, способи налагодження і галузь застосування.
Зміст звіту
Назва роботи.
Мета роботи.
Послідовність виконання роботи.
Вказати призначення, тип та основні технічні дані апаратів.
Накреслити електричну і конструктивну схеми чи ескізи апаратів, які за вказівкою викладача вивчалися більш детально.
Дати опис роботи схеми чи конструкції апарата, вказати галузь його застосування.
Висновок.
Питання для самоконтролю
Будова запобіжника низької напруги.
Принцип дії, будова повітряного автоматичного вимикача.
Принцип дії, будова контактора постійного і змінного струму.
Принцип дії, будова електричних реле.
Лабораторна робота №3
ДОСЛІДЖЕННЯ МЕХАНІЧНИХ ХАРАКТЕРИСТИК ДВИГУНА ПОСТІЙНОГО СТРУМУ ПАРАЛЕЛЬНОГО ЗБУДЖЕННЯ
Мета роботи
Експериментальне дослідження характеристик машини постійного струму паралельного збудження в режимі двигуна та гальмівних режимах.
Тривалість заняття
Тривалість лабораторної роботи 4 години.
Обладнання, матеріали та інструменти
Електродвигуни постійного струму, асинхронний двигун, кнопки керування, магнітні пускачі, контактори, провідники, реостати, вимірювальні прилади, автоматичний вимикач, тахогенератор.
Місце проведення заняття
Лабораторна робота проводиться в лабораторії електроприводу 7ма.
Загальні відомості
Аналітична залежність швидкості обертання від електромагнітного моменту М двигуна постійного струму паралельного збудження визначається за рівнянням:
 ,
,
де, Rяк = Rя + Rдп + Rщ + Rд - опір якірного кола, який складається з суми таких опорів, а саме: опору обмотки якоря, додаткових полюсів, щіткових контактів і зовнішнього додаткового опору /Ом/.
Розрізняють природні та штучні механічні характеристики. Природна характеристика двигуна показує залежність =f(M), коли номінальні значення напруги, магнітного потоку і відсутній додатковий опір в колі якоря.
Штучна механічна характеристика – це залежність =f(M), коли двигун живиться від мережі з напругою, відмінною від номінальної; наявний додатковий опір в колі якоря або обмотці збудження.
В усталеному режимі електромагнітний момент, визначається рівнянням
М=Мв+Мо ,
де Мв – момент, який діє на валі двигуна;
Мо= Мтр+ Мвен+ Мст – момент неробочого ходу, який визначається: наявністю тертя в підшипниках, вентиляційними втратами і втратами в стальному магнітопроводі.
Знаки у рівнянні визначаються режимом роботи електричної машини.
Момент М0 залежить від швидкості обертання двигуна, а тому для визначення п=f(Mв) необхідно мати експериментальну криву п=f(Мо).
Залежно від режиму роботи машини =f(Mо) визначається додаванням або відніманням характеристик =f(M) і =f(Mо).
Запуск системи генератор-двигун відбувається у такій послідовності. Автоматичним вимикачем QF1 подається напруга на обмотки збудження генератора та навантажувального двигуна, вимикачем QF2 вмикається асинхронний двигун М в мережу, але рубильник S в якірному колі генератордвигун (Г-Д) розімкнутий. Далі виконується запуск досліджуваного двигуна DD до номінальної швидкості обертання. Рубильник S можна вмикати лише тоді, коли сума ерс в якірному колі Г-Д буде дорівнювати нулю (показ V0 дорівнює нулю).
Дослід найзручніше виконувати в такій послідовності. Зменшуючи струм збудження машини GN і збільшуючи струм збудження машини DN, завантажуємо дослідний двигун DD до /1.51.7/Ін. Струм навантаження контролюємо за допомогою амперметра А1. Далі збільшуючи струм збудження машини DN, знаходимо ще декілька точок для режиму двигуна. Щоб одержати характеристику =f(I), необхідно для кожного значення частоти обертання двигуна робити відлік показу вольтметра V1 і амперметра А1.
Частоту обертання двигуна вимірюємо за допомогою тахогенератора TG і вольтметра V2.
Далі зменшуючи збудження машини DN, дослідний двигун DD переводиться в генераторний режим, про що свідчить зміна струму в якірному колі двигуна DD (амперметр А1). Під час роботи двигуна на штучній характеристиці Ф=0,6Фн слід обмежитись лише роботою машини в режимі двигуна.
При роботі двигуна з додатковим опором у колі якоря можна зняти характеристику в режимі противмикання. Для цього необхідно спочатку зменшити струм збудження машини GN до мінімуму, а потім змінити потенціометром П напрям струму в обмотці збудження ОЗ GN. Двигун DD змінить свій напрям обертання і буде працювати в режимі противмикання.
Результати вимірювань і розрахункові дані записати в табл. 3.1.
Таблиця 3.1
Експериментальні дані
Режим роботи роботи |
Результати спостережень |
Розрахункові значення |
Примітка |
|||||||||
n |
I1 |
U1 |
|
Р1 |
РМ |
РЩ |
РД |
Р1 |
Р |
М |
||
об/хв |
А |
В |
рад/с |
Вт |
Вт |
Вт |
Вт |
Вт |
Вт |
Нм |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.1. Схема експериментальної установки
Для зняття механічних характеристик, у режимі динамічного гальмування необхідно при швидкості обертання DD =0 увімкнути магнітний пускач KM1, тоді якір двигуна DD від’єднається від мережі живлення і замкнеться на гальмівний опір Rд. Швидкість обертання двигуна DD при Rд=const регулюється за допомогою машини DN.
Дослідний двигун DD і його обмотка збудження ОЗ DD під’єднанні до мережі за допомогою автомата QF1. Струм у колі обмотки збудження може регулюватися за допомогою опору R1 і контролюється амперметром А3. За допомогою магнітних пускачів КМ1 і КМ2 можна увімкнути якір двигуна або в мережу, або на опір. Для визначення значення струму та напруги якоря служать А1 і вольтметр V1. Навантаження на валі двигуна в даній установці виконується навантажувальною системою Г-Д.
У табл. 3.1. фізичні величини визначаються:
Р1=U1Iя - потужність, яку споживає електродвигун із мережі живлення;
РМ=Iя2Rя - втрати потужності в мідній обмотці якоря;
РЩ=2UЩIя - втрати потужності на щітках;
UЩ=0,5 В - спад напруги в перехідному опорі між щітками і колектором;
РД=0.005Р1 - додаткові втрати потужності;
Р1= РМ+ РЩ+ РД - сумарні втрати потужності;
Р=Р1-Р1 - електромагнітна потужність;
Rя=0,69 Ом - опір якірної обмотки;
М=Р/ - електромагнітний момент двигуна.