

Глава 5. Синтез многокаскадных нечётких систем управления технологическими процессами
На сегодняшний день системы, построенные на принципах нечёткой логики, находят своё применение во многих сферах человеческой деятельности и области их использования постоянно расширяются. Такие системы используются при управлении сложными технологическими процессами, при управлении бизнес-процессами, в системах поддержки принятия решений, при создании различных приборов и бытовой техники.
Одним из направлений развития нечётких систем управления является построение нечётких экспертных систем основанных на принципах многокаскадности. Использование таких структурных решений позволяет существенно повысить интеллектуальность системы, что впоследствии позволит расширить диапазон применения нечётких систем. Первый каскад нечёткого регулятора можно рассматривать как экспертную систему, которая на основе имеющихся входных данных производит управление регуляторами, находящимися во втором каскаде.
5.1. Многокаскадные нечётких регуляторы систем управления пиролизными установками мобильного
типа.
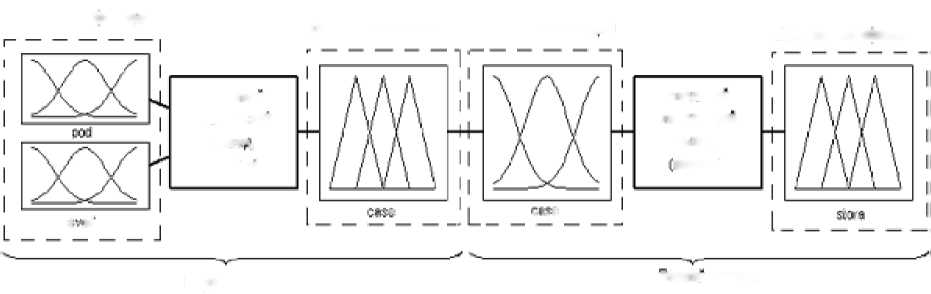
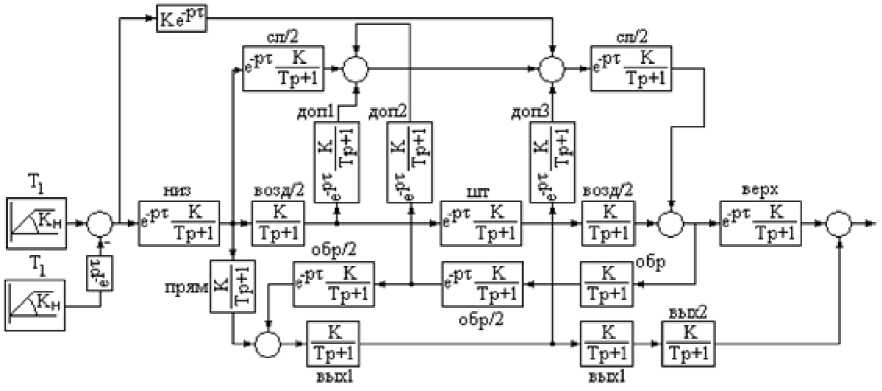
Построим многокаскадный нечёткий регулятор пиролизной установки мобильного типа с пассивным способом управления (рис. 5.1), состоящий из двух каскадов (рис. 5.2).
Рис.
5.1 Структурная схема пиролизной
установки
с
пассивным способом
регулирования
Блок
фаззиоикации
Бл
ок
дефзгэйфикации Блок
фаээифмсации
Блок д&фаззификацни
Нечеткии
логическим
шеи-.
(гваїгівл)
■
■■
.
:.V
Нз'-рткии
Г0ГИНЄШ1И
БЬ
БОД
mamcfeni)
'
: ■
старая
каскад
Рис. 5.2. Многокаскадный нечёткий регулятор
Функции принадлежности для входной лингвистической переменной pod первого каскада представлены на рис. 5.3.
Рис. 5.3. Функции
принадлежности лингвистической
переменной pod
Обозначениям,
приведённым на рис. 5.3, соответствуют
следующие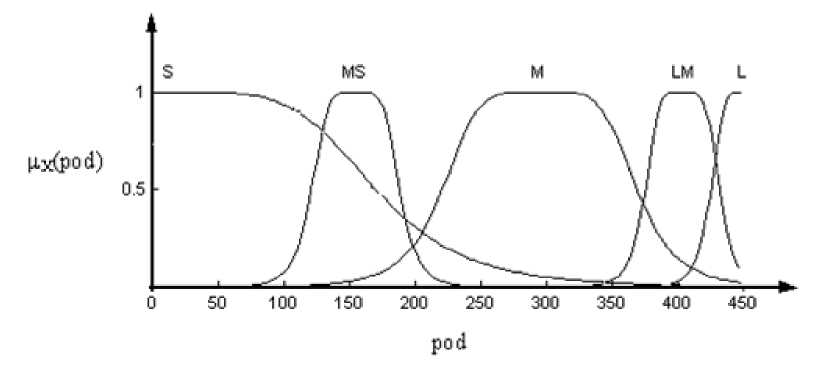
лингвистические значения:
£ - «малое близкое к нулю»;
МБ - «малое близкое к среднему»;
М - «среднее»;
ЬМ - «большое близкое к среднему»;
Ь - «большое».
Функции принадлежности для входной лингвистической переменной зуой первого каскада представлены на рис. 5.4.
Рис. 5.4. Функции принадлежности
лингвистической переменной svod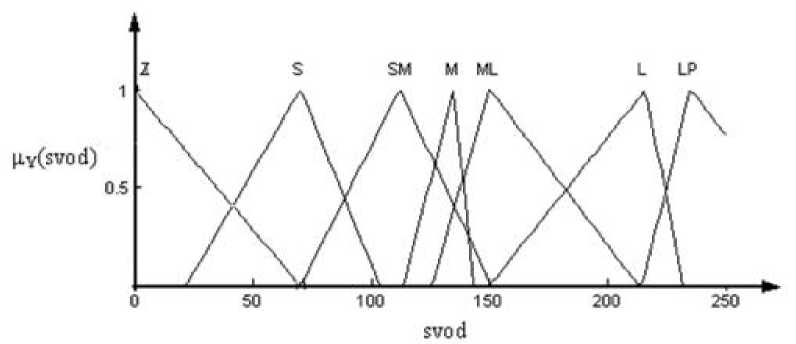
Обозначениям, приведённым на рис. 5.4, соответствуют следующие лингвистические значения:
Z - «нулевое»;
S - «малое близкое к нулю»;
SM - «малое близкое к среднему»;
М - «среднее»;
LM - «большое близкое к среднему»;
L - «большое»;
LB - «очень большое».
Функции принадлежности для выходной лингвистической переменной case первого каскада представлены на рис. 5.5.
Рис. 5.5. Функции принадлежности
лингвистической переменной case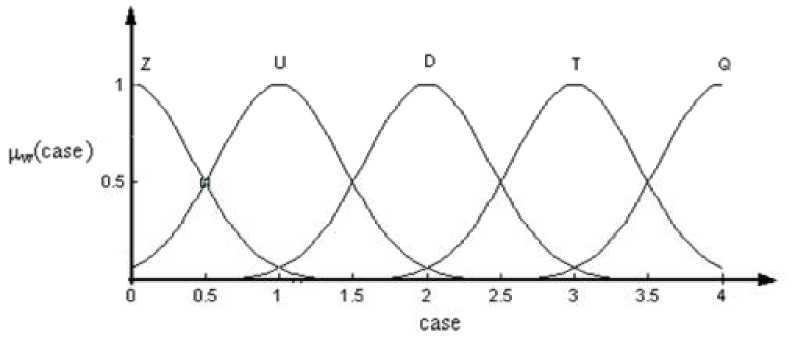
Обозначениям, приведённым на рис. 5.5, соответствуют следующие лингвистические значения:
Z - «нулевой»;
U - «первый»;
D - «второй»;
T - «третий»;
Q - «четвертый».
Дефаззификация происходит на основе стандартного метода центра тяжести.
БЗ будет состоять из 11 продукционных правил вместо 35 возможных, рассчитанных из условия её полноты.
Если pod есть S и svod есть Z, то case есть Z;
Если pod есть S и svod есть S, то case есть Z;
Если pod есть S и svod есть SM, то case есть D;
Если pod есть L и svod есть M, то case есть T;
Если pod есть L и svod есть ML, то case есть T;
Если pod есть L и svod есть L, то case есть T;
Если pod есть L и svod есть LP, то case есть Q;
Если pod есть S и svod есть M, то case есть T;
Если pod есть L и svod есть SM, то case есть D;
Если pod есть L и svod есть S, то case есть U;
Если pod есть MS и svod есть SM, то case есть T.
Для второго каскада функции принадлежности для входной лингвистической переменной case представлены на рис. 5.6.
Рис. 5.6. Функции принадлежности
лингвистической переменной case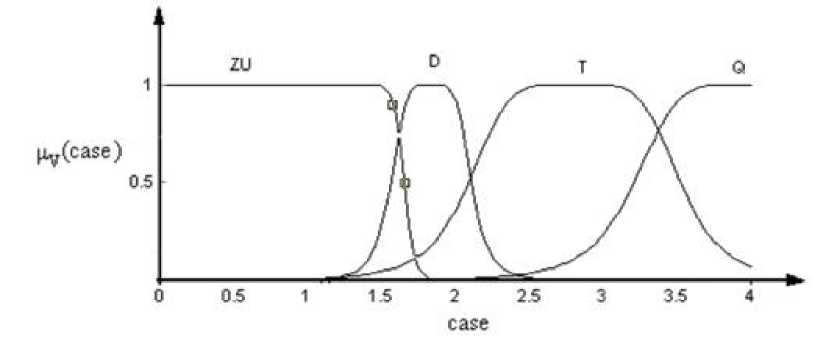
Обозначениям, приведённым на рис. 5.6, соответствуют следующие лингвистические значения:
ZU - «нулевой и первый»;
D - «второй»;
T - «третий»;
Q - «четвёртый».
Функции принадлежности для выходной лингвистической переменной stora второго каскада представлены на рис. 5.7.
Рис. 5.7. Функции
принадлежности лингвистической
переменной stora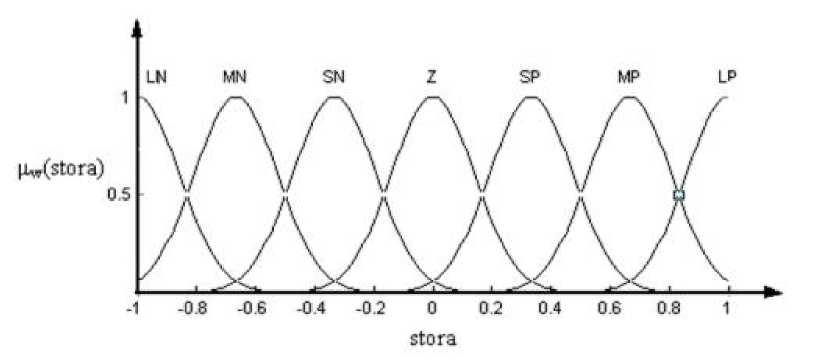
Лингвистическая переменная stora принимает следующие лингвистические значения:
LN - «отрицательное большое»;
MN - «отрицательное среднее»;
SN - «отрицательное малое»;
Z - «нулевое»;
SP - «положительное малое»;
MP - «положительное среднее»;
LP - «положительное большое».
Дефаззификация происходит на основе метода среднего максимума. БЗ будет состоять из 4 продукционных правил.
Если case есть ZU, то stora есть LP;
Если case есть D, то stora есть SP;
Если case есть T, то stora есть SN;
Если case есть Q, то stora есть MN.
Смоделируем процесс пиролиза древесины в углевыжигательной печи с синтезированным НЛР. Полученные динамические характеристики сравним с характеристиками системы без регулятора (рис. 5.8).
1Р
Ч *
Рис. 5.8 - Динамические характеристики
системы управления: 1 - классическая
система, 2 - система с НЛР.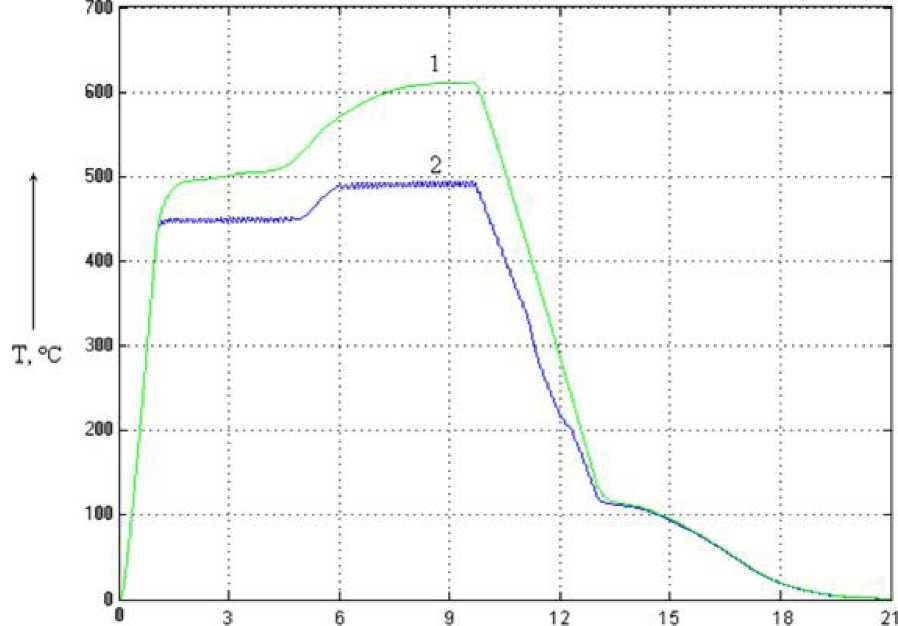
Анализ результатов моделирования показывает, что введение нечёткого управления несколько повышает стабилизацию температурного поля, уменьшая температурное рассогласование углевыжигательной печи на этапе прокаливания угля (величина рассогласования не превышает 60 °С). Температура удерживается в диапазоне 450...550 оС, т.е. в данном случае применение многокаскадного НЛР обеспечивает улучшение качества регулирования.
Синтез многокаскадного нечёткого регулятора с алгоритмом вывода Сугено/Мамдани
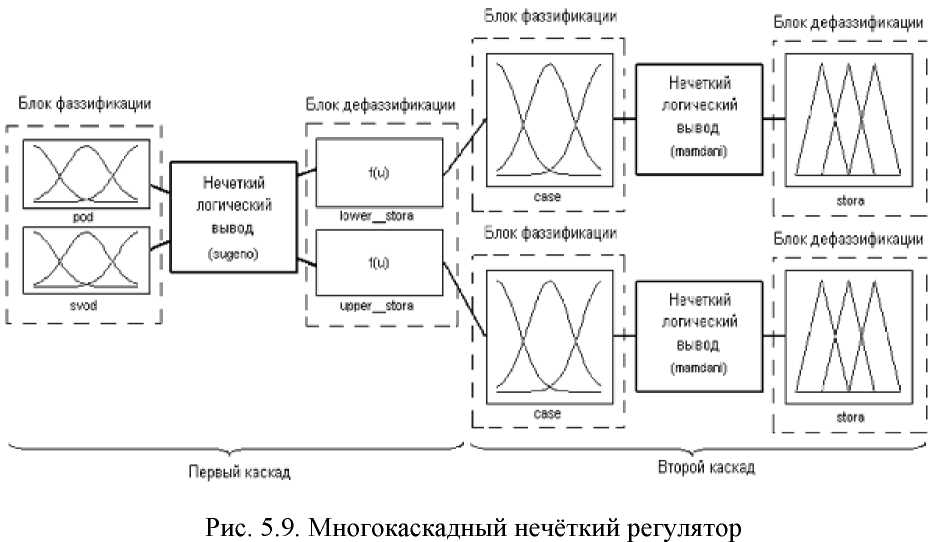
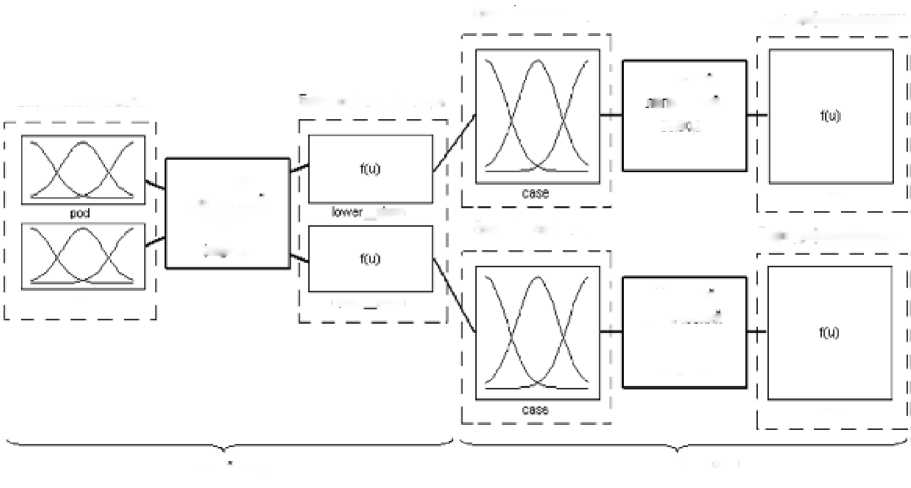
Построим двухкаскадный НЛР с раздельным управление нижней и верхней шторами (рис. 5.9). Первый НЛР имеет два входа, соответствующие температуре пода и свода установки (pod и svod), и два выхода. На выходах регулятора формируются сигналы, соответствующий тому или иному сочетанию значений pod и svod, индивидуальные для нижней и верхней штор. Второй каскад состоит из двух одинаково настроенных регуляторов, управляющих пространственным положением нижней и верхней штор (lower stora и upper stora). Каждый такой НЛР имеет один вход и один выход.
Построим первый каскад с использованием алгоритма вывода Суге- но. Вид функций распределения входных лингвистических переменных pod и svod первого каскада будет идентичен функциям, приведённым на рис. 5.3 и 5.4. Функции принадлежности выходных переменных - константы, т.е. НЛР с алгоритмом вывода Сугено имеет нулевой порядок.
Дефаззификация происходит на основе стандартного метода центра тяжести.
БЗ будет состоять из 11 продукционных правил вместо 35 возможных, рассчитанных из условия её полноты.
Если
pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
Если pod
есть
£ и 8Уой есть £, то \ower_stora есть 0 и ыррвг_81ога есть 0;
£ и 8Уой есть £М, то \ower_stora есть 2 и иррег_8^га есть 2; ЬМ и svod есть М, то \ower_stora есть 3 и upper_stora есть 3; ЬМ и svod есть ЬМ, то \ower_stora есть 3 и upper_stora есть 3; ЬМ и svod есть Ь, то \ower_stora есть 3 и upper_stora есть 3; ЬМ и svod есть ЬВ, то \ower_stora есть 4 и upper_stora есть 4; £ и svod есть М, то \ower_stora есть 3 и upper_stora есть 3; ЬМ и svod есть £М, то \ower_stora есть 3 и upper_stora есть 2; ЬМ и svod есть £, то \ower_stora есть 2 и upper_stora есть 1;
Ь и svod есть £М, то \ower_stora есть 3 и upper_stora есть 3.
Рис.
5.10. Функции принадлежности лингвистической
переменной case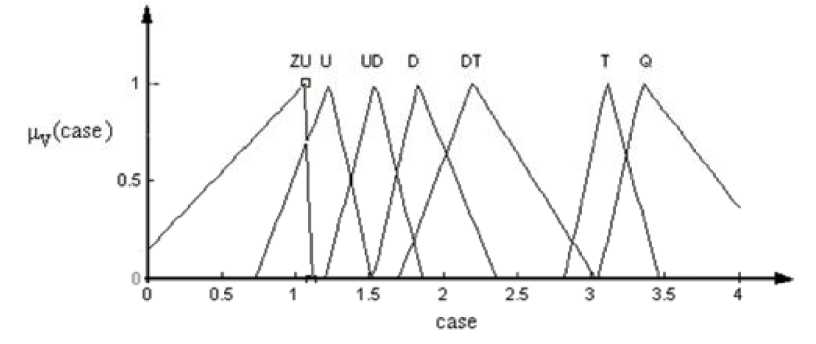
Обозначениям, приведённым на рис. 5.10, соответствуют следующие лингвистические значения:
- «нулевой»; и - «первый»;
иО - «между первым и вторым»;
О - «второй»;
ОТ - «второй, близкий к третьему»;
Т- «третий»;
Q - «четвертый».
Функции принадлежности для выходной лингвистической переменной $1ота второго каскада представлены на рис. 5.11.
Рис. 5.11. Функции принадлежности
лингвистической переменной 51ота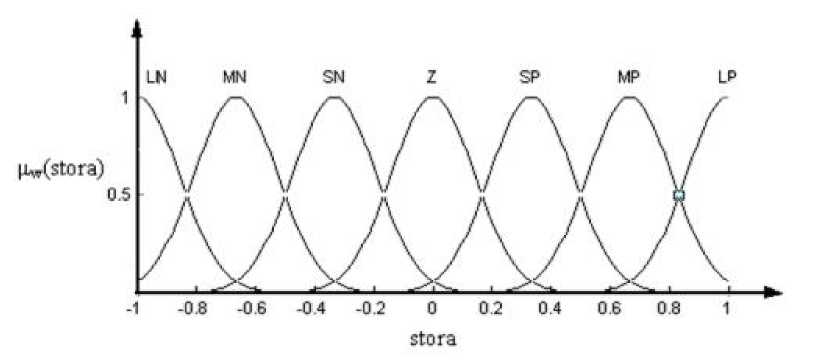
Лингвистическая переменная 81ота принимает следующие лингвистические значения:
ЬИ - «отрицательное большое»;
МИ - «отрицательное среднее»;
РИ - «отрицательное малое»;
2 - «нулевое»;
РР - «положительное малое»;
МР - «положительное среднее»;
ЬР - «положительное большое».
Дефаззификация происходит на основе стандартного метода центра тяжести.
БЗ будет состоять из 7 продукционных правил.
Если case есть Z , то stora есть LP;
Если case есть U, то stora есть LP;
Если case есть UD, то stora есть Z;
Если case есть D, то stora есть SN;
Если case есть DT, то stora есть SN;
Если case есть T, то stora есть SN;
Если case есть Q, то stora есть SN.
Смоделируем процесс пиролиза древесины в углевыжигательной печи с синтезированным НЛР. Полученные динамические характеристики сравним с характеристиками системы без регулятора (рис. 5.12).
Рис. 5.12. Динамические характеристики
процесса пиролиза. 1 - система
без НЛР; 2 - система с многокаскадным
НЛР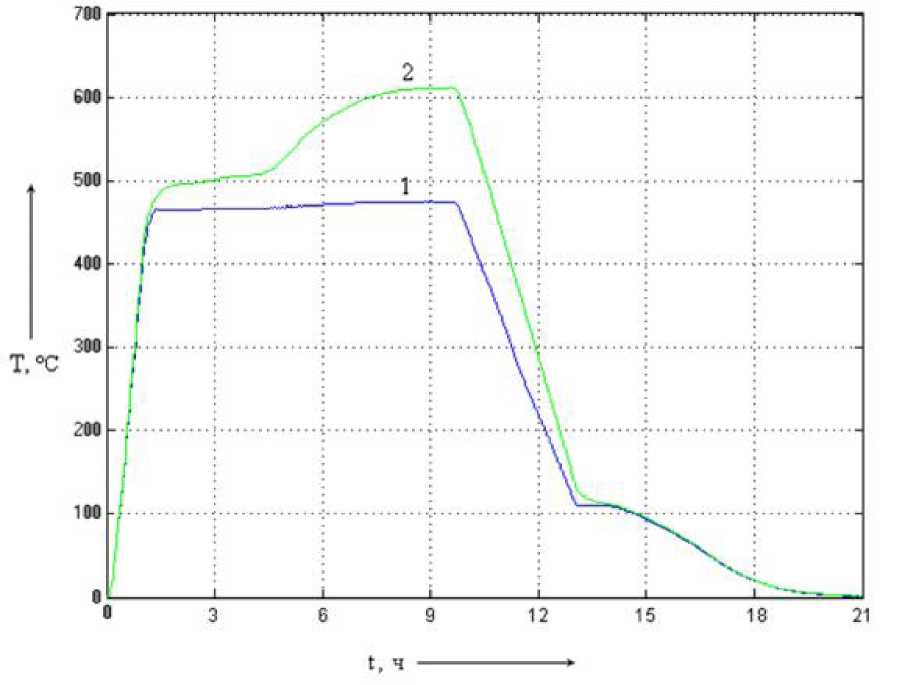
 Анализ
результатов моделирования показывает,
что введение нечёткого управления
повышает стабилизацию температурного
поля, уменьшая температурное рассогласование
углевыжигательной печи на этапе
прокаливания угля. Температура
удерживается в диапазоне 460...470 оС,
т.е. в данном случае применение
многокаскадного НЛР с раздельным
управлением верхней и нижней шторами
обеспечивает улучшение качества
регулирования.
Анализ
результатов моделирования показывает,
что введение нечёткого управления
повышает стабилизацию температурного
поля, уменьшая температурное рассогласование
углевыжигательной печи на этапе
прокаливания угля. Температура
удерживается в диапазоне 460...470 оС,
т.е. в данном случае применение
многокаскадного НЛР с раздельным
управлением верхней и нижней шторами
обеспечивает улучшение качества
регулирования.
Синтез многокаскадного нечёткого регулятора с алгоритмом вывода Сугено/Сугено
Елок
(ратификации
Блёк
деоайИфнкйцни
Начеткии
О
ИЧ0Ш1И
Блок
фзззификацин
ьлокдафаззифнкацни
svod
Нечеткий
логическим
ВЫВОД
І5ЦЖПО)
ттсг-а
шдоґ
stars
Елок
фюэнфикации
ИНН
1,4,
(sugenoj
Нечетки
И
логическим
вывод
СНДОО)
SlQfi
Елок
д
ооооэиф ІЖС
ЦП
1%
■
Второй
каскад
Первый каскад
Рис. 5.13. Многокаскадный нечёткий регулятор
Для второго каскада функции принадлежности для входной лингвистической переменной case представлены на рис. 5.14.
Рис. 5.14. Функции
принадлежности лингвистической
переменной case
Обозначениям, приведённым на рис. 5.14, соответствуют следующие лингвистические значения:
ZU - «нулевой и первый»;
UD - «между первым и вторым»;
DTQ - «второй, третий, четвертый».
Функции принадлежности выходных переменных - константы.
БЗ будет состоять из 3 продукционных правил.
Если case есть ZU, то stora есть 1;
Если case есть UD, то stora есть 0;
Если case есть DTQ, то stora есть -1.
Смоделируем процесс пиролиза древесины в углевыжигательной печи с синтезированным НЛР. Полученные динамические характеристики сравним с характеристиками системы без регулятора (рис. 5.15).
Рис. 5.15. Динамические характеристики
процесса пиролиза (1 - система без НЛР;
2 - система с многокаскадным НЛР)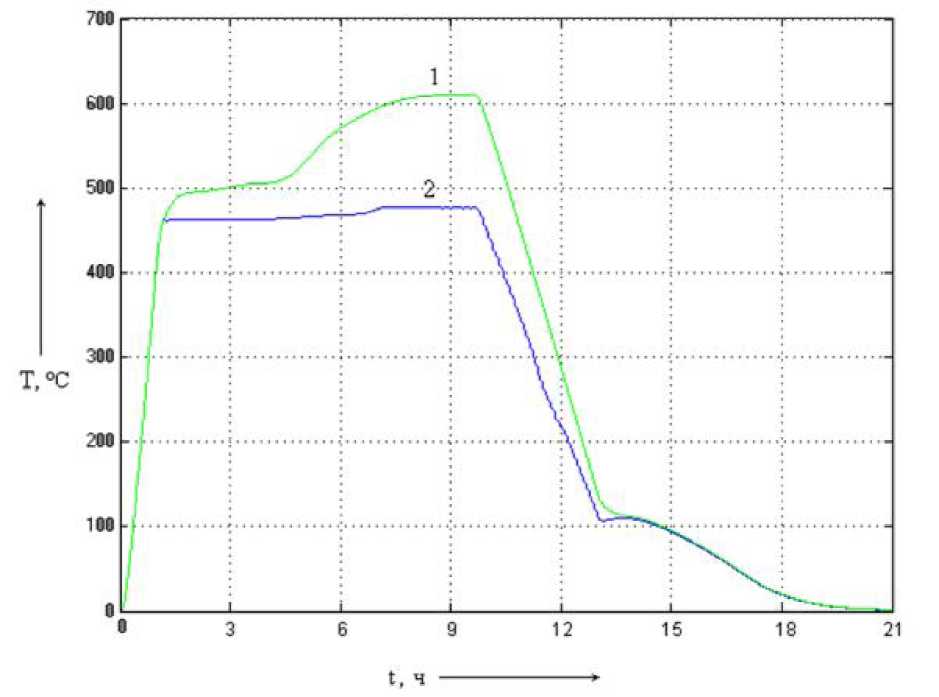
Анализ результатов моделирования показывает, что введение нечёткого управления повышает стабилизацию температурного поля, уменьшая температурное рассогласование углевыжигательной печи на этапе прокаливания угля. Температура удерживается в диапазоне 460...480 оС, т.е. в данном случае применение многокаскадного НЛР с раздельным управлением верхней и нижней шторами обеспечивает улучшение качества регулирования.
Анализ систем управления построенных с различными сочетаниями алгоритмов нечёткого вывода
Смоделируем процесс пиролиза древесины в углевыжигательной печи с синтезированными НЛР. Полученные динамические характеристики сравним с характеристиками системы без регулятора (рис. 5.16).
Рис. 5.16. Динамические характеристики
процесса пиролиза (1 - система без НЛР;
2 - система с однокаскадным НЛР; 3 - система
с многокаскадным НЛР с алгоритмом
вывода Мамдани/Мамдани; 4 - система с
многокаскадным НЛР с алгоритмом вывода
Сугено/Мамдани с раздельным управлением
шторами; 5 - система с многокаскадным
НЛР с алгоритмом вывода Сугено/Сугено
с раздельным управлением шторами)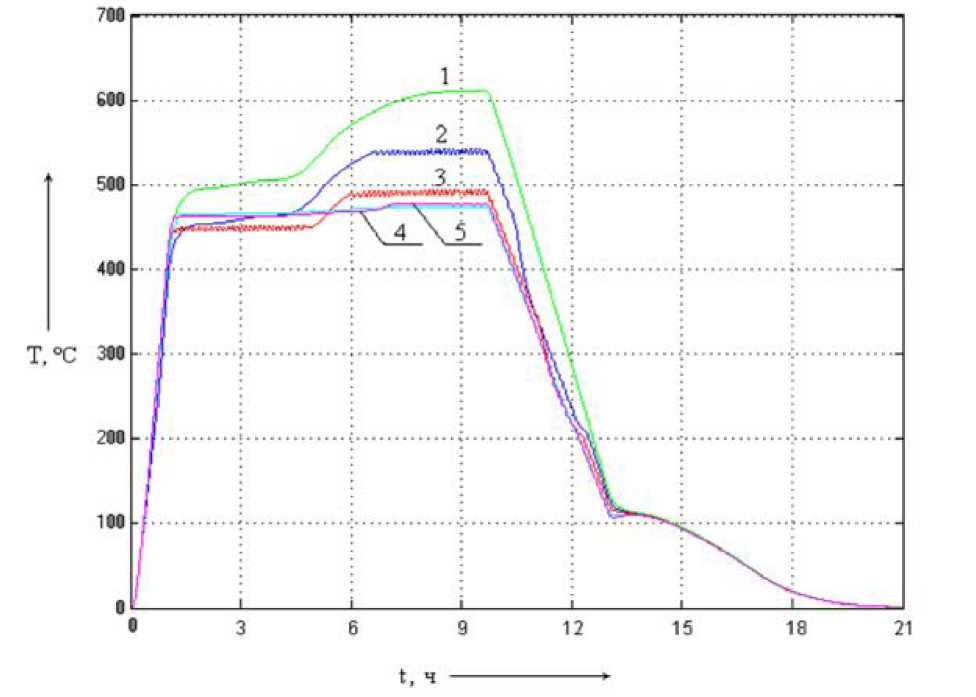
В ходе процесса пиролиза температура в системе без НЛР на этапе прокаливания угля выходит за пределы желаемой области. Анализируя полученные характеристики, можно сказать, что система управления с лю-
бым из четырёх НЛР позволяет улучшить процесс пиролиза за счёт выравнивания температур во всем объёме среды сугливания, но наиболее эффективным является НЛР с раздельным управлением верхней и нижней шторами. Разница температур между подом и сводом камеры при использовании этих регуляторов на этапе прокаливания угля составляет всего не более 5 °С, в то время как при использовании других регуляторов она составляет порядка 50°С. Такие результаты получаются за счёт более гибкого управления при использовании НЛР с раздельным управлением шторами.
Как следует из результатов моделирования, применение НЛР с использованием любого из алгоритмов вывода позволяет повысить качество получаемого в процессе пиролиза древесного угля за счёт уменьшения температурного рассогласования на этапах экзотермической реакции и прокаливания угля.
Применение многокаскадных нечётких регуляторов позволяет более точно стабилизировать температуру на этапе прокаливания угля и удерживать её в требуемом диапазоне 450...550 оС. НЛР с алгоритмом вывода по Сугено позволяет добиться более равномерного распределения температур внутри камеры установки при существенном сокращении базы правил регулятора.
Рассмотрим поведение системы при действии возмущений различного характера. Исследуем поведение системы при различных изменениях её параметров, связанных с изменением температурного режима работы. Для этого будем менять соотношения параметров процесса пиролиза, не изменяя при этом настройки НЛР.
Рассмотрим влияние изменения параметров самой системы путём изменения коэффициента усиления первого апериодического звена К і на -10...+10%. На рис. 5.17 приведены переходные процессы системы без регулятора.
Рис. 5.17. Динамические
характеристики системы
без регулятора (1 - при
коэффициенте усиления 110 %
К/;
2 - при коэффициенте усиления 105
% К/;
3 - при коэффициенте усиления 100 %
К/;
4 - при коэффициенте усиления 95 % К/;
5 - при коэффициенте усиления 90 % К/)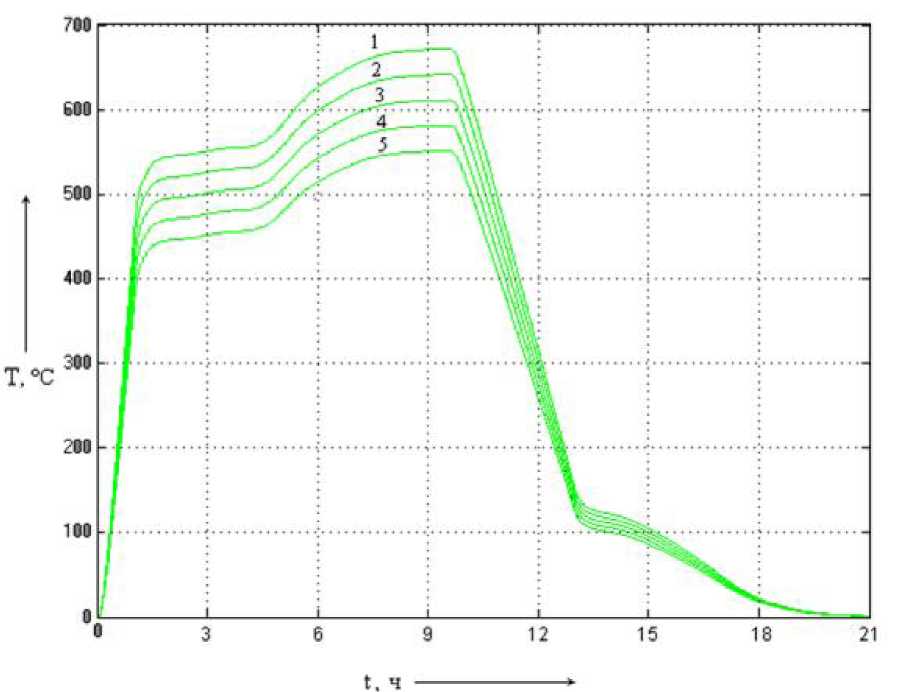
При увеличении параметра К/ первого апериодического звена температура прокаливания угля в системе без регулятора намного превышает желаемый диапазон 450...550 оС. Температурное рассогласование превышает 100 °С. С уменьшением К температура приближается к желаемому диапазону, однако рассогласование сохраняется большим.
Рис. 5.18. Динамические
характеристики системы
с однокаскадным нечётким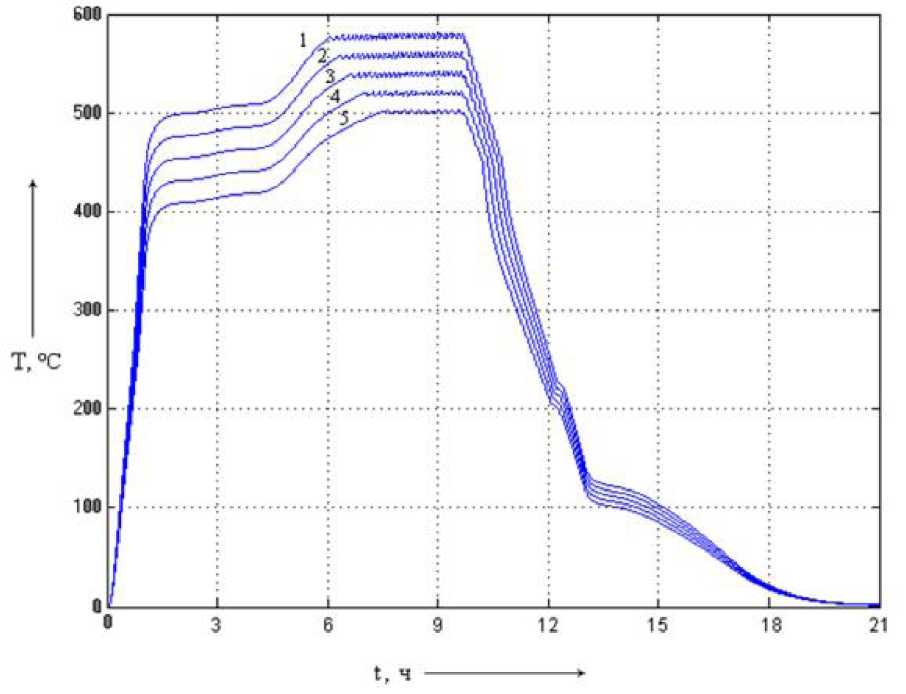
регулятором (1 - при коэффициенте усиления 110 % Rf; 2 - при коэффициенте усиления 105 % Rf, 3 - при коэффициенте усиления 100 % Rf, 4 - при коэффициенте усиления 95 % Rf, 5 - при коэффициенте усиления 90 % Rf)
Анализ результатов моделирования (рис. 5.18) показывает, что введение нечёткого управления несколько повышает стабилизацию температурного поля. При изменении Rf температура изменяется в несколько более широком диапазоне, чем желаемый, однако это превышение незначительно, т.е. в данном случае применение однокаскадного НЛР обеспечивает уменьшение чувствительности к изменению параметров системы.
Рис. 5.19. Динамические
характеристики системы
с многокаскадным нечётким регулятором
(1 - при коэффициенте усиления 110 % К^; 2 -
при коэффициенте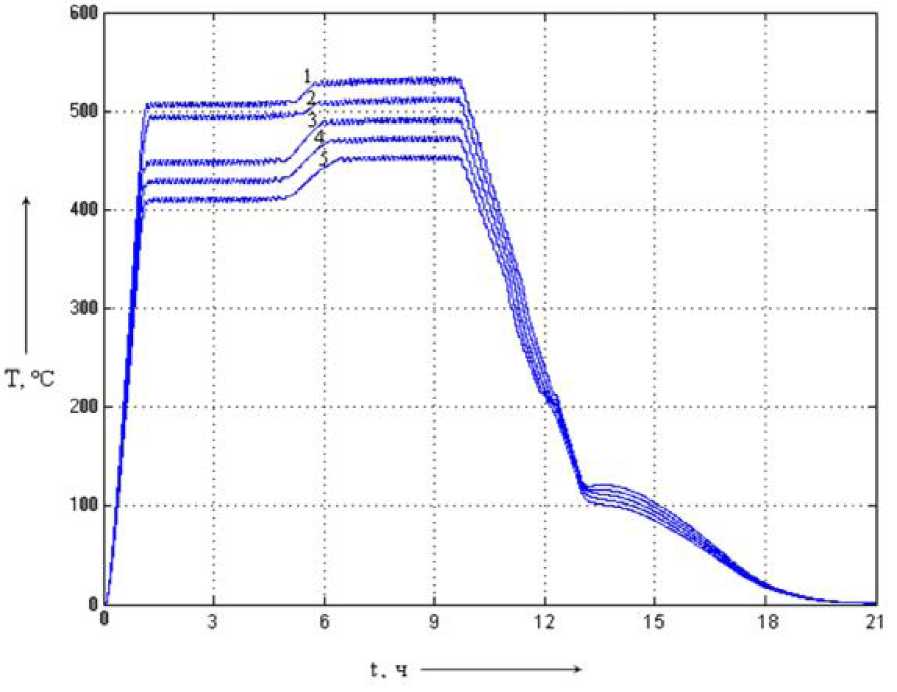
усиления 105 % К]; 3 - при коэффициенте усиления 100 % К]; 4 - при коэффициенте усиления 95 % К у, 5 - при коэффициенте усиления 90 % К])
Анализ результатов моделирования показывает, что введение нечёткого управления несколько повышает стабилизацию температурного по- ля(рис. 5.19). При увеличении параметра К] графики переходных процессов располагаются плотнее, что позволяет удерживать температура на этапе прокаливания угля в желаемом диапазоне и уменьшить температурное рассогласование. С уменьшением К] температура становится незначительно ниже желаемого диапазона, а температурное рассогласование сохраняется небольшим - до 50 оС, т.е. в данном случае применение многокаскадного НЛР обеспечивает уменьшение чувствительности к изменению параметров системы.
Рис. 5.20. Динамические
характеристики системы
с многокаскадным нечётким
регулятором с раздельным управлением
шторами с алгоритмом вывода Сугено/Мамдани
(1 - при коэффициенте усиления 110 % К];
2 - при коэффициенте усиления 105 % К];
3 - при коэффициенте усиления 100 % К];
4 - при коэффициенте усиления 95 % К];
5 - при коэффициенте усиления 90 % К])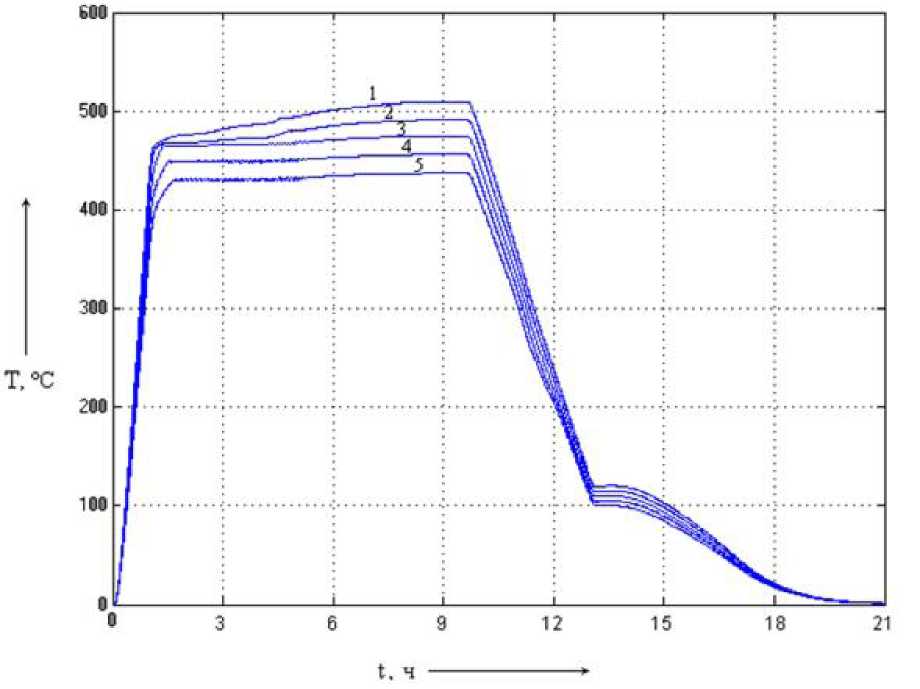
Анализ результатов моделирования показывает, что введение нечёткого управления повышает стабилизацию температурного поля, уменьшая температурное рассогласование углевыжигательной печи на этапе прокаливания угля. При изменении К] температура удерживается в диапазоне 420...510 оС, что приближено с желаемому диапазону, т.е. в данном случае применение многокаскадного НЛР с раздельным управлением верхней и нижней шторами обеспечивает уменьшение чувствительности к изменению параметров системы и улучшение качества регулирования (рис. 5.20).
Рис. 5.21. Динамические характеристики
системы с многокаскадным нечётким
регулятором с раздельным управлением
шторами с алгоритмом вывода Сугено/Сугено
(1 - при коэффициенте усиления 110 % К];
2 - при коэффициенте усиления 105 % К
у, 3 -
при коэффициенте усиления 100 % К
у, 4 -
при коэффициенте усиления 95 % К
у, 5 -
при коэффициенте усиления 90 % К])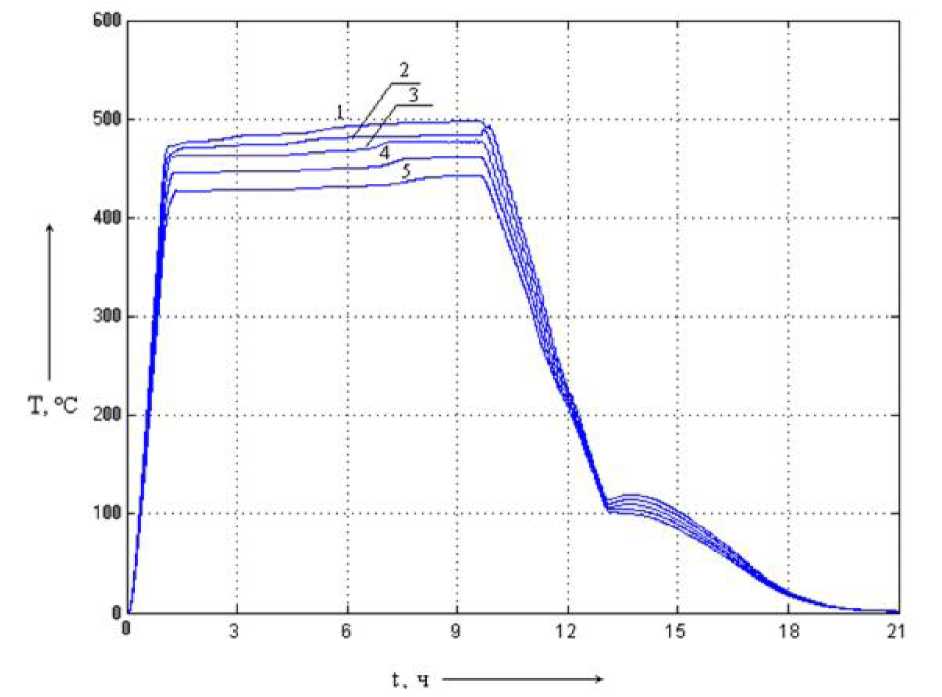
Анализ результатов моделирования показывает, что введение нечёткого управления повышает стабилизацию температурного поля, уменьшая температурное рассогласование углевыжигательной печи на этапе прокаливания угля (рис. 5.21). При изменении К] графики расположены плотно, температура удерживается в диапазоне 420...500 оС, что приближено с желаемому диапазону, т.е. в данном случае применение многокаскадного НЛР с раздельным управлением верхней и нижней шторами обеспечивает уменьшение чувствительности к изменению параметров системы и улучшение качества регулирования.
Для оценки влияния коэффициента усиления первого апериодического звена на переходный процесс построим сводную характеристику для температуры в точке начала экзотермической реакции (4-5 ч) в зависимо
9
К
9Ж]
06
К
Рис.
5.22. Зависимость температуры начала
экзотермической реакции от Кі
(1
- система без НЛР; 2 - система с однокаскадным
НЛР; 3 - система с многокаскадным НЛР с
алгоритмом вывода Мамдани/Мамдани; 4 -
система с многокаскадным НЛР с алгоритмом
вывода Сугено/Мамдани с раздельным
управлением шторами; 5 - система с
многокаскадным НЛР с алгоритмом вывода
Сугено/Сугено с раздельным управлением
шторами)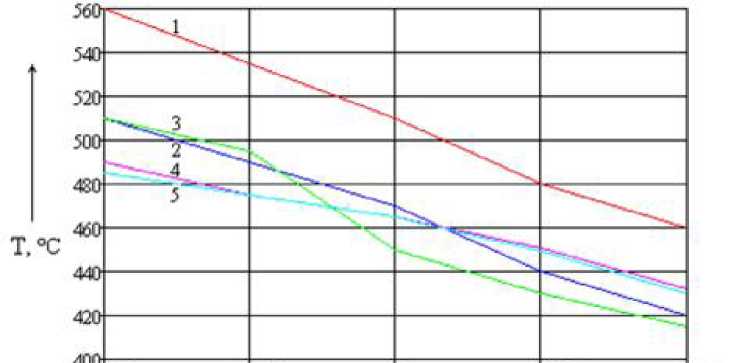 сти
от Кj
(рис. 5.22).
сти
от Кj
(рис. 5.22).
Система управления с любым из четырех НЛР позволяет уменьшить чувствительность к изменению параметра К\ первого апериодического звена системы и улучшить процесс пиролиза. При изменении К температура удерживается в диапазоне 450...550 °С или близко к нему. Система же без НЛР выходит из допустимых температурных пределов, в результате чего полученный древесный уголь окажется низкого качества. Точка начала экзотермической реакции смещается в больших пределах - до 100 °С.
Наиболее эффективным является НЛР с раздельным управлением верхней и нижней шторами. Графики переходных процессов расположены близко друг к другу и не выходят за пределы желаемого диапазона. Точка
начала экзотермической реакции смещается в пределах не более 60 °С. Такие результаты получаются за счет более гибкого управления при использовании НЛР с раздельным управлением шторами.
Рассмотрим влияние изменения параметров самой системы путем изменения постоянной времени первого апериодического звена Т/.
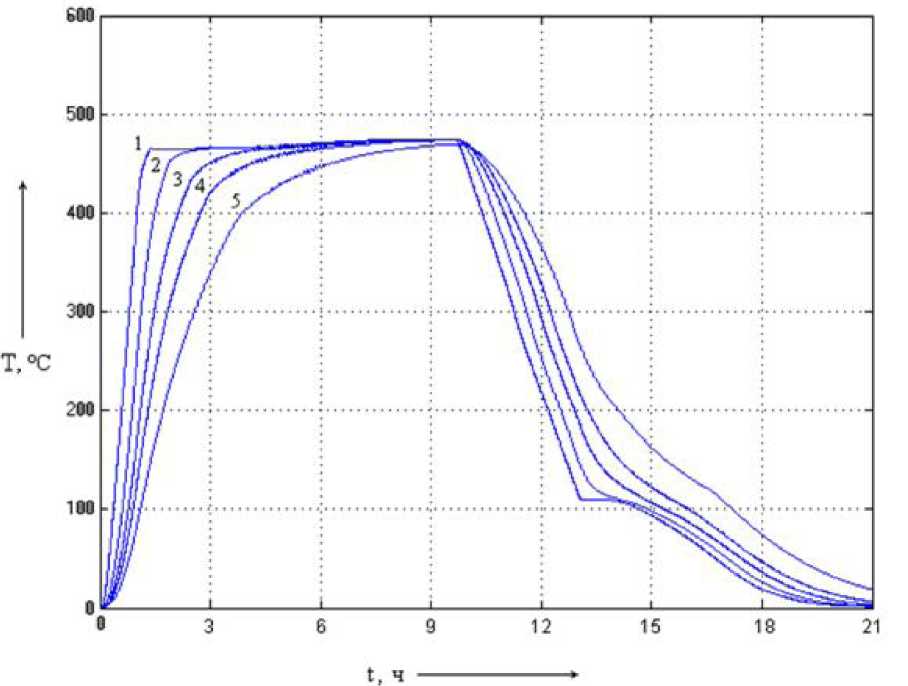
На рис. 5.23 приведены переходные процессы системы без регулятора.
Рис. 5.23. Динамические характеристики
системы без регулятора (1 - при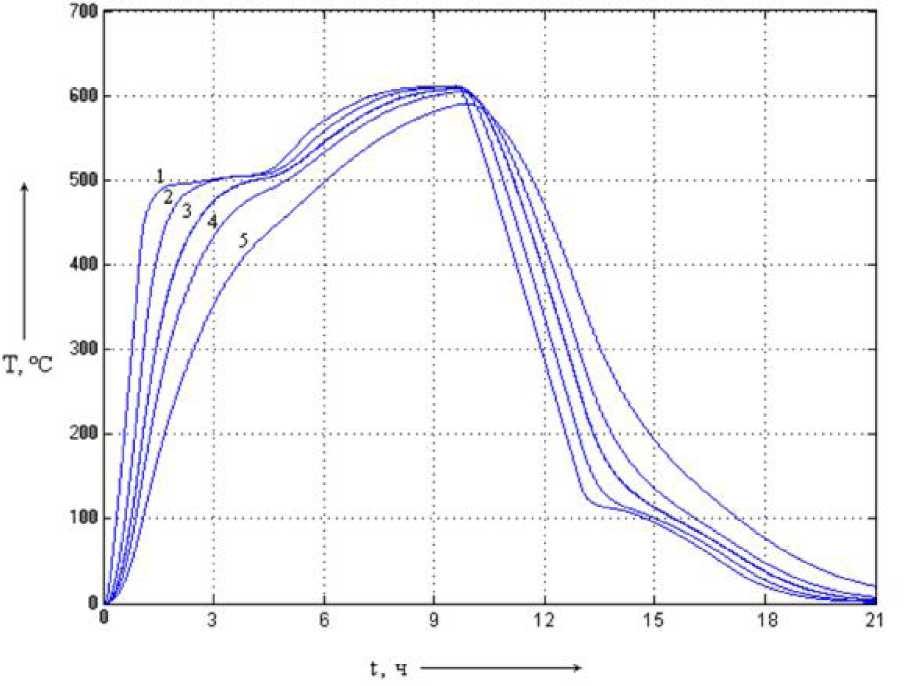
постоянной времени Т1; 2 - при постоянной времени 10Т1; 3 - при постоянной времени 20Т1; 4 - при постоянной времени 30Т1; 5 - при постоянной времени
50Т1)
Анализируя данные графиков, можно отметить, что в системе без НЛР с изменением Т1 происходит замедление процессов в системе, а также меняется величина температурного рассогласования теплового поля установки в начале и конце процесса прокаливания угля. При больших Т1 ско-
170
рость нагрева понижается, не выдерживается продолжительность пребывания сырья при желаемой температуре от 450 до 550 °С.
Рис. 5.24. Динамические характеристики
системы с однокаскадным нечётким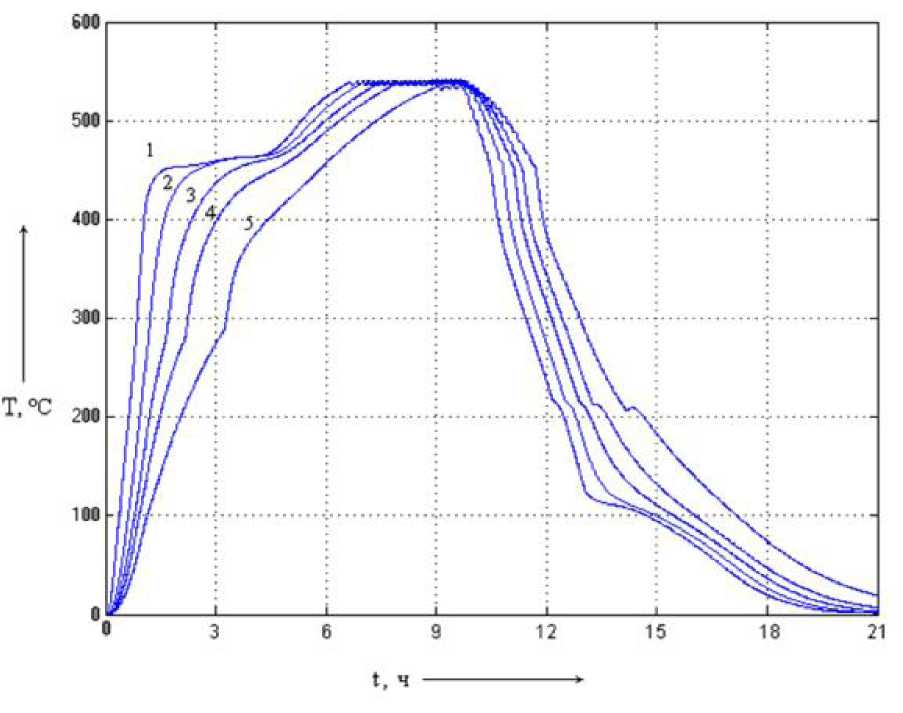
регулятором (1 - при постоянной времени Ті, 2 - при постоянной времени 10 Ті, 3 - при постоянной времени 20 Ті; 4 - при постоянной времени 30 Ті; 5 - при
постоянной времени 50 Ті)
Анализ результатов моделирования показывает, что введение нечёткого управления несколько повышает стабилизацию температурного поля (рис. 5.24). Однако, как и в системе без НЛР с изменением Ті происходит замедление процессов в системе, а также меняется величина температурного рассогласования теплового поля установки в начале и конце процесса прокаливания угля. При больших Ті скорость нагрева понижается, не выдерживается продолжительность пребывания сырья при желаемой температуре от 450 до 550 °С.
Применение однокаскадного НЛР позволяет удерживать конечную
температуру нагрева.
Рис. 5.25. Динамические характеристики
системы с многокаскадным нечётким
регулятором (1 - при постоянной времени
Ті;
2 - при постоянной времени 10 Ті;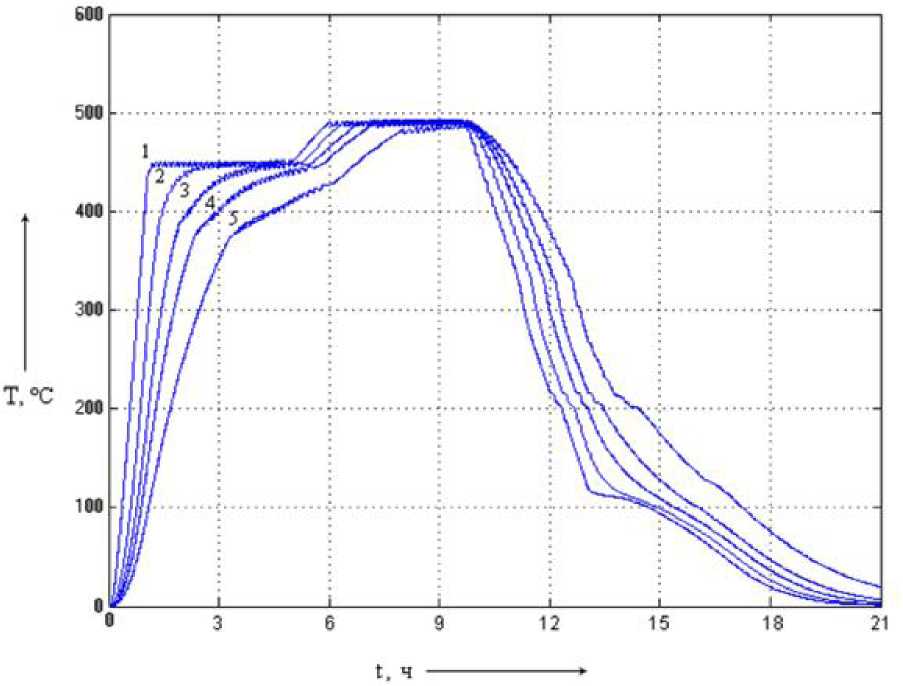
- при постоянной времени 20 Ті; 4 - при постоянной времени 30 Ті; 5 - при
постоянной времени 50 Ті)
Анализ результатов моделирования показывает, что введение нечёткого управления несколько повышает стабилизацию температурного поля. С изменением Ті происходит замедление процессов в системе, а также меняется величина температурного рассогласования теплового поля установки в начале и конце процесса прокаливания угля. При больших Т1 скорость нагрева понижается, не выдерживается продолжительность пребывания сырья при желаемой температуре от 450 до 550 °С (рис. 5.25).
Применение многокаскадного НЛР позволяет увеличить продолжительность пребывания сырья при той или иной температуре и удерживать конечную температуру нагрева.
Рис. 5.26. Динамические характеристики
системы с многокаскадным нечётким
регулятором с раздельным управлением
шторами с алгоритмом вывода Сугено/Мамдани
(1 - при постоянной времени Ті;
2 - при постоянной времени 10Т/; 3 - при
постоянной времени 20Ті;
4 - при постоянной времени 30Ті;
5 -
при постоянной времени 50Т1
)
Анализ результатов моделирования показывает, что введение нечёткого управления несколько повышает стабилизацию температурного поля. С изменением Ті происходит замедление процессов в системе, однако величина температурного рассогласования теплового поля установки в начале и конце процесса прокаливания угля меняется незначительно (рис. 5.26). Применение многокаскадного НЛР позволяет увеличить про
должительность пребывания сырья при температуре от 410 до 470 °С и удерживать конечную температуру нагрева, т.е. в данном случае применение многокаскадного НЛР с раздельным управлением шторами обеспечивает уменьшение чувствительности к изменению параметров системы и некоторое улучшение качества регулирования.
Рис. 5.27. Динамические характеристики
системы с многокаскадным нечётким
регулятором с раздельным управлением
шторами с алгоритмом вывода Сугено/Сугено
(1 - при постоянной времени Ті;
2 - при постоянной времени 10Т/; 3 - при
постоянной времени 20Ті;
4 - при постоянной времени 30Ті;
5 -
при постоянной времени 50Т1)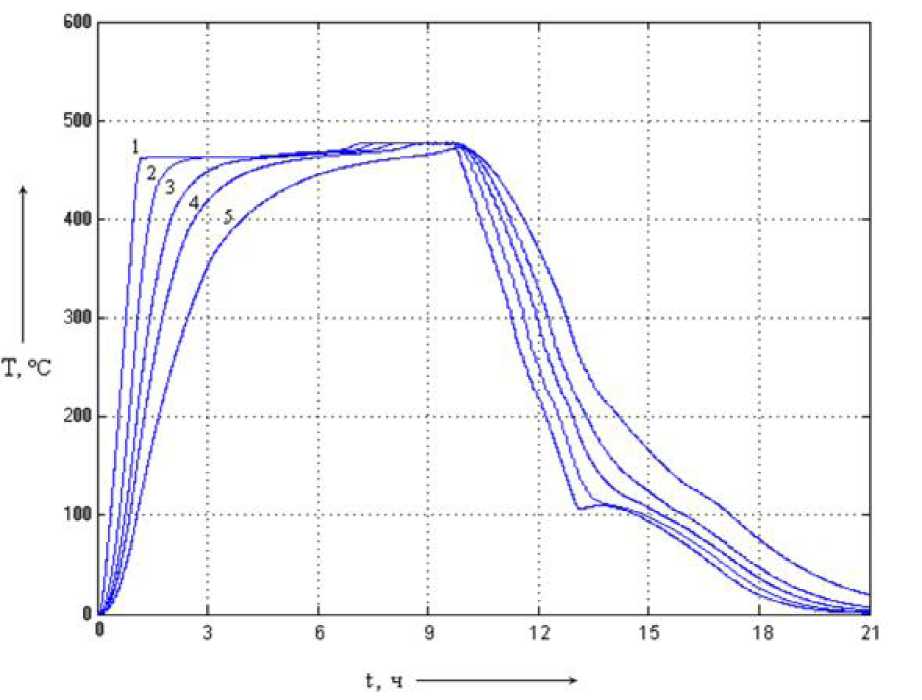
Анализ результатов моделирования показывает, что введение нечёткого управления несколько повышает стабилизацию температурного поля. С изменением Ті происходит замедление процессов в системе, однако ве-
личина температурного рассогласования теплового поля установки в начале и конце процесса прокаливания угля меняется незначительно. Применение многокаскадного НЛР позволяет увеличить продолжительность пребывания сырья при температуре от 410 до 470 °С и удерживать конечную температуру нагрева (рис. 5.27), т.е. в данном случае применение многокаскадного НЛР с раздельным управлением верхней и нижней шторами обеспечивает уменьшение чувствительности к изменению параметров системы и некоторое улучшение качества регулирования.
Для оценки влияния постоянной времени первого апериодического звена на переходный процесс построим сводную характеристику для температуры в точке начала экзотермической реакции (4-5 ч) в зависимости от Т1 (рис. 5.28).
Рис. 5.28. Зависимость температуры начала
экзотермической реакции от Т1
(1 - система без НЛР; 2 - система с
однокаскадным НЛР; 3 - система с
многокаскадным НЛР с алгоритмом вывода
Мамдани/Мамдани; 4 - система с многокаскадным
НЛР с алгоритмом вывода Сугено/Мамдани
с раздельным управлением шторами; 5 -
система с многокаскадным НЛР с алгоритмом
вывода Сугено/Сугено с раздельным
управлением шторами)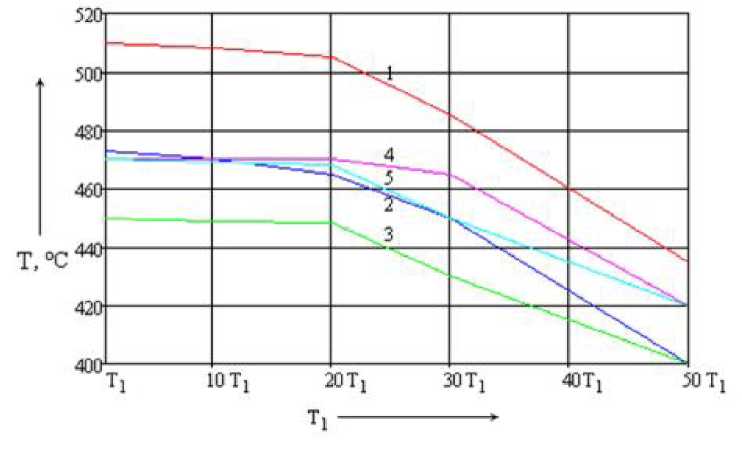
Как было отмечено ранее, в каждом режиме пиролиза надо выдерживать скорость нагрева, продолжительность пребывания сырья при той или
175
иной температуре, её значение, конечную температуру нагрева. В системе без НЛР и с любым из четырех нечётких регуляторов с изменением Т] происходит замедление процессов. При больших Т] скорость нагрева понижается, не выдерживается продолжительность пребывания сырья при желаемой температуре от 450 до 550 °С. Но системы с НЛР позволяют уменьшить величину температурного рассогласования теплового поля установки в начале и конце процесса прокаливания угля, удержать конечную температуру нагрева и увеличить время пребывания сырья в желаемом температурном диапазоне. В системах с НЛР точка начала экзотермической реакции смещается в пределах 50...70 °С, тогда как в исходной системе это смещение достигает 100 °С. В системах с НЛР с раздельным управлением шторами все процессы наиболее приближены к технологии пиролиза.
Анализируя результаты моделирования системы при различных возмущениях, можно констатировать, что синтезированные НЛР придают системе управления некоторые свойства робастности, т.е. пониженной чувствительности к изменениям параметра системы.
Сравнительный анализ результатов моделирования нечёткой системы регулирования углевыжигательной печью с регулятором и без показал, что НЛР позволяет оптимизировать переходные процессы в системе за счет уменьшения температурного рассогласования на этапе экзотермического процесса и повысить качество выходной продукции - древесного угля, т.к. процесс пиролиза протекает при более равномерном распределении температур. Использование НЛР наглядно демонстрирует улучшение стабилизационных свойств системы на этапе пиролиза древесины, в противном случае температура (в системе без НЛР) выходит за пределы желаемой температурной области.
Наиболее эффективным является НЛР с раздельным управлением верхней и нижней шторами с любым из алгоритмов вывода. НЛР с алгоритмом вывода по Сугено позволяет добиться более равномерного распределения температур внутри камеры установки при существенном сокращении базы правил регулятора. При прочих равных условиях и при оптимальных параметрах погрешность регулирования с применением алгоритма Сугено меньше, чем с применением алгоритма Мамдани.
НЛР способен компенсировать возникающие в объекте управления изменения параметров, что позволяет оптимизировать переходные процессы. При этом использование НЛР с алгоритмом нечёткого логического вывода Сугено является более предпочтительным, поскольку НЛР, построенный по такому алгоритму, лучшим образом осуществляет реализацию законов управления сложными объектами.
Синтез нечёткого многокаскадного ПИД-регулятора.
Применение нечёткой логики в управлении позволяет отказаться от создания достаточно точной математической модели динамической системы и использовать лишь экспертные знания о поведении системы. В связи с этим рассмотрим применение нечёткого многокаскадного управления системой с отрицательной обратной связью и ПИД - регулятором (рис. 5.29). В качестве входных измеряемых координат выбраны ошибка и производная ошибки, в качестве выходной координаты - выход ПИД-регулятора.
Рис. 5.29. Система с отрицательной обратной
связью и ПИД - регулятором
177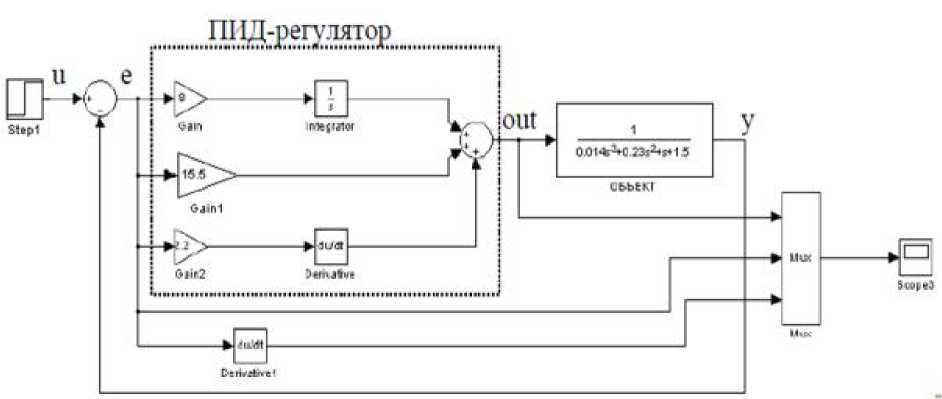
Объект управления представляет собой полином третьего порядка. Его передаточная функция Ко (я) имеет вид:
К (я) = 3 1 2 .
0.014 • я3 + 0.23 • я2 + я +1.5
Математическая модель системы с ПИД-регулятором исследована с точки зрения переходных процессов по «ошибке», «производной ошибки» и «выходу» при скачке сигнала задания и при неизменных параметрах объекта управления. Переходные процессы исследуемых величин приведены на рис. 5.30.
Рис. 5.30. Графики переходных процессов
измеряемых величин ПИД-регулятора (1 -
выход регулятора; 2 - ошибка; 3 - производная
ошибки)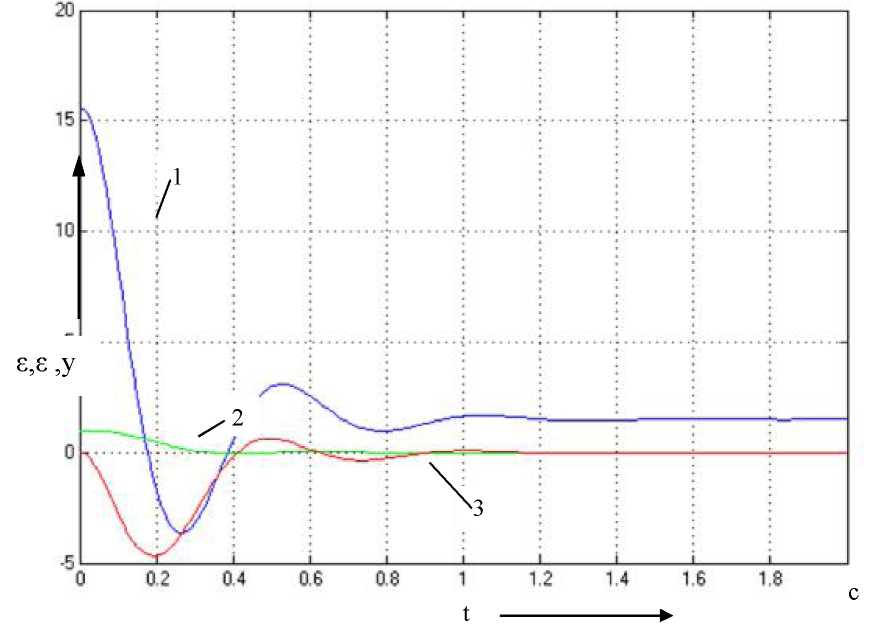
Основным недостатком приведённой системы стабилизации является сравнительно невысокая динамическая точность при действии недетерминированных возмущений и изменениях параметров объекта управления. Для повышения динамической точности целесообразно использовать в системе регулирования вместо ПИД-регулятора нечёткие логические регуляторы.
В пользу НЛР может выступать и то, что хорошо настроить ПИД- регулятор на практике достаточно сложно. Поиск хороших ПИД настроек - процесс во времени длительный. Хорошо если инженер имеет специальные компьютерные программы, позволяющие ему искать правильные решения эффективно и с минимальными временными затратами, но на практике это не всегда так. Поэтому для ослабления влияния отмеченных факторов попробуем интеллектуализировать систему управления за счёт введения НЛР.
5.2.1 Синтез нечёткой системы управления
Нечёткая система управления представляет собой три нечётких регулятора установленных соответственно в пропорциональном, интегральном и дифференциальном каналах ПИД-регулятора (Рис. 5.31).
Рис. 5.31. Структурная схема нечёткой
системы управления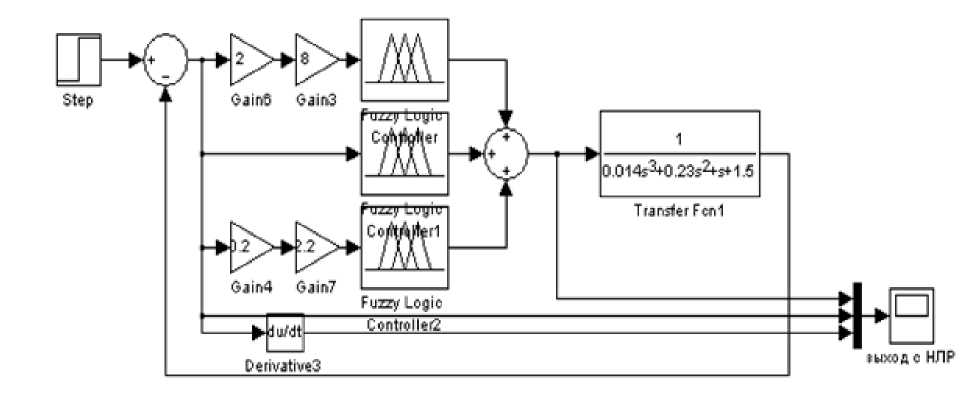
При синтезе нечёткого регулятора будем применять алгоритм нечёткого логического вывода Сугено, для которого характерна эффективность в вычислительном отношении, высокая линейная сходимость, а также существенная формализация.
Настройка НЛР осуществляется в соответствии со структурной схемой приведённой на рис. 5.30. Средством, позволяющим связать любую физическую величину с каким-либо множеством, качественно характеризующим её значения, является лингвистическая переменная. Введем лингвистическую переменную «ошибка» (е). Для всех внутренних термов, входной переменной, назначим треугольные функции принадлежности.
Учитывая, что к виду переходной характеристики системы не предъявляются специальные требования, для снижения алгоритмической сложности базы знаний нечёткого контроллера базовое терм-множество входных лингвистических переменных ограничим на уровне пяти. Терм множество - Т лингвистических переменных - имеет название термов: Т={Б, РБ, РМ, РВ, РУБ), означающее соответственно: «малое», «положительное малое», «положительное среднее», «положительное большое», «положительное очень большое».
Количественные характеристики функций принадлежности определим в зависимости от диапазона изменения параметра, для которого строятся функции принадлежности его термов. Они могут быть получены либо из экспериментальных данных, либо из результатов моделирования, но в любом случае они должны действительно влиять на систему. В работе диапазоны входных переменных получены по результатам моделирования ПИД-регулятора. Для входа регулятора диапазон изменения принят [-0.05, 1]. Вид термов для лингвистической переменной «ошибка» представлен на рис. 5.32.
Рис. 5.32. Функции
принадлежности лингвистической
переменной «ошибка»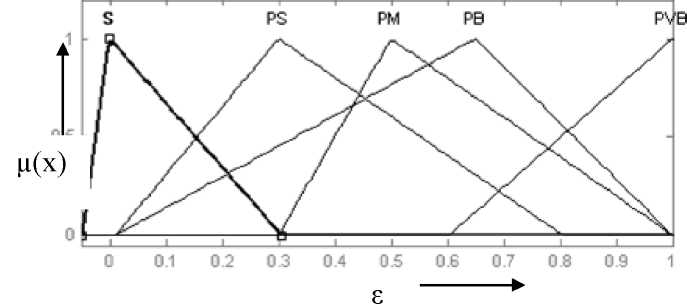
Терм-множество выходных лингвистических переменных ограничим на уровне трёх. Терм множество - Т1 лингвистических переменных - имеет название термов: Т1=(КБ, РБ, РВ}, означающее соответственно: «отрицательно малое», «положительное малое», «положительное большое».
Для выхода регулятора диапазон изменения параметров управляющего воздействия принят [-2; 6; 14,5].
Содержательным компонентом блока нечёткого вывода является база знаний НЛР. Она строится исходя из цели применения НЛР.
В естественно-языковой вербальной форме управление будет иметь следующий вид:
Если сигнал ошибки положительный и возрастает, то управляющий сигнал будет - положительный малый. Если положительный сигнал ошибки будет очень большой, то управляющий сигнал на выходов также будет расти, становясь положительным большим. Если сигнал ошибки будет падать, то выходной сигнал также будет падать.
Базу знаний нечёткого регулятора целесообразно формировать в виде ряда продукционных правил. Получим множество управляющих правил, связывающих лингвистические значения входной и выходной переменных вида:
1) Если «ошибка» есть РВ, тогда «управление» есть РБ = 6,
«Если «ошибка» есть РУБ, тогда «управление» есть РВ = 14.5,
«Если «ошибка» есть PM, тогда «управление» есть № = -2,
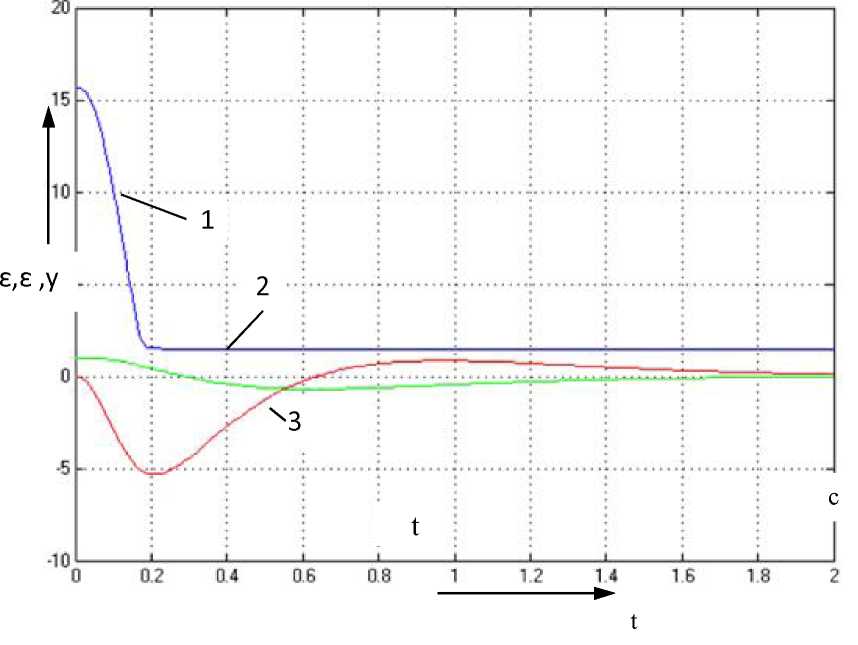
Рис. 5.33. Графики переходных процессов измеряемых величин в системе с НЛР (1 - выход регулятора; 2 - ошибка; 2 - производная ошибки)
«Если «ошибка» есть РS, тогда «управление» есть № = -2. Графики переходных процессов системы представлены на рис. 5.31
Результаты моделирования, приведённые на рис. 5.33, наглядно показывают правомерность применения НЛР. Полученная система обладает лучшими показателями качества, чем система с ПИД-регулятором. Длительность переходного процесса уменьшилась в 6 раз. Использование методов нечёткого управления позволило получить качественный переходный процесс без использования громоздких вычислительных процедур, характерных для классического метода управления, хотя для улучшения
182
динамических характеристик и плавности выходного сигнала пришлось подбирать дополнительные коэффициенты усиления.
5.2.1 Нечёткая многокаскадная система управления
Структурно многокаскадная нечёткая система регулирования может быть реализована путём добавления дополнительного НЛР в систему приведённую на рис. 5.34. НЛР ставится последовательно в канал управления. Интеллектуальные свойства нечёткого регулятора дают возможность формировать корректирующее воздействие на каждый локальный канал управления. Регулятор формирует корректирующие поправки заменяющие коэффициенты К1, К2 и КЗ ПИД - регулятора. Выходы НЛР подаются на вход НЛР построенного в предыдущем разделе, который соответственно вырабатывает управляющий сигнал сходный с управляющими воздействиями ПИД-регулятора, являющийся суммой трёх слагаемых. Структурная схема многокаскадной нечёткой системы регулирования представлена на рис. 5.34.
Рис. 5.34. Структурная схема многокаскадной
нечёткой системы управления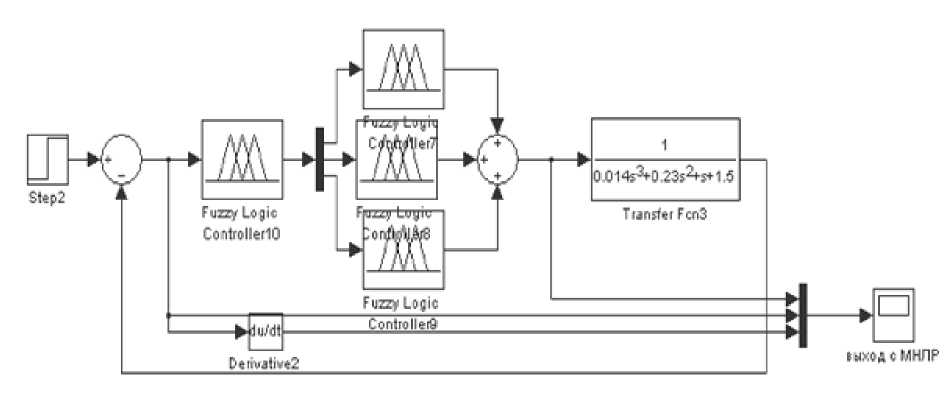
Данная система должна обеспечить формирование переходных характеристик рассматриваемых каналов близких к полученным в системе с ПИД-регулятором и в системе с НЛР (или улучшить эти характеристики).
Функциональная схема многокаскадного нечёткого логического регулятора приведена на рис. 5.35

На нечёткое корректирующее звено возлагается задача выработки корректирующего воздействия в диапазоне изменения динамической ошибки системы стабилизации, при синтезе нечёткого регулятора используем алгоритм вывода по Мамдани, как наиболее простой и интуитивный. Несмотря на то, что алгоритм Мамдани рекомендуют применять в других областях, а именно в экспертных системах и системах принятия решений, он может эффективно работать и в нашей нечёткой системе управления, что будет показано ниже.
Введём входную лингвистическую переменную «ошибкаї» (є1). Для всех внутренних термов, входной переменной, назначим треугольные функции принадлежности.
Учитывая, что к виду переходной характеристики системы не предъявляются специальные требования, для снижения алгоритмической сложности базы знаний нечёткого контроллера базовое терм-множество входных лингвистических переменных ограничим на уровне четырёх. Некоторый произвол при выборе количества термов обусловлен тем, что при возрастании количества термов возрастает объем базы правил, а существенного выигрыша в точности не наблюдается.
Терм множество - Т2 лингвистических переменных - имеет название термов: Т2=(К8, 7, РБ, РВ}, означающее соответственно: «отрицательное малое», «нулевое», «положительное малое», «положительное большое».
Количественные характеристики функций принадлежности определим в зависимости от диапазона изменения параметра, для которого строятся функции принадлежности его термов. Диапазоны изменения параметров были получены из результатов моделирования ПИД-регулятора. Для входа регулятора диапазон изменения принят [-0.7, 1]. Исходя из того, что данная входная переменная имеет 4 термы, получим следующие функции принадлежности, представленные на рис. 5.36.
Рис. 5.36. Функции принадлежности
лингвистической переменной «ошибка
1»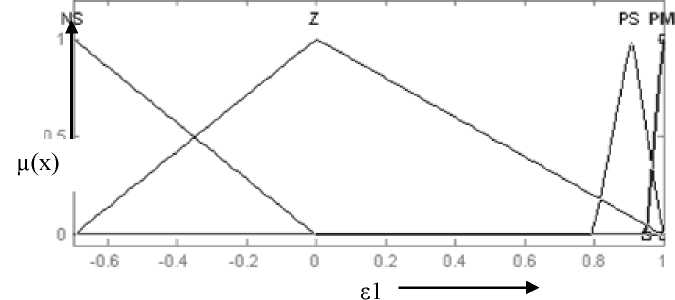
Введём выходные лингвистические переменные «коррекция 1» (у1) , «коррекция 2» (у2), «коррекция 3» (у3). Для всех внутренних термов, выходных переменных, назначим треугольные функции принадлежности.
Диапазон изменения корректирующего воздействия взят с расчётом, чтобы управляющее воздействие действительно могло влиять на систему. Для каждого из трёх выходов он имеет своё значение.
Для снижения алгоритмической сложности базы знаний нечёткого контроллера базовое терм-множество выходных лингвистических переменных ограничим на уровне четырёх, также как и для входной лингвистической переменной. Для трёх выходных сигналов зададимся тремя терм множествами - Т3, Т4, Т5 соответственно.
Рис. 5.37. Функции
принадлежностей корректирующего
воздействия первого
выхода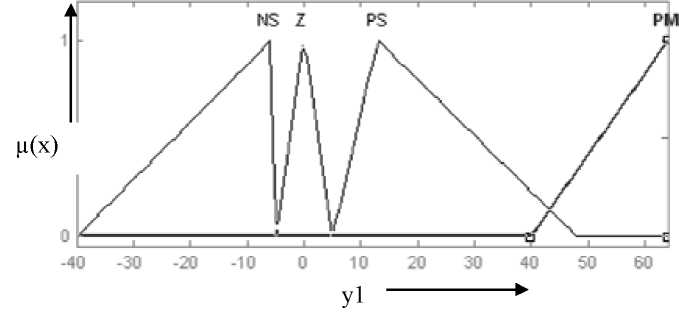
Рассмотрим первый выход НЛР. Терм-множество Т3 лингвистических переменных - имеет название термов: Т3=(КБ, 7, РБ, РВ}, означающее соответственно: «отрицательное малое», «нулевое», «положительное малое», «положительное большое». Диапазон управляющего воздействия для этого выхода принят [-40, 64], а функции принадлежности корректирующего сигнала приведены на рис. 5.37.
Рис. 5.38. Функции
принадлежностей корректирующего
воздействия второго
выхода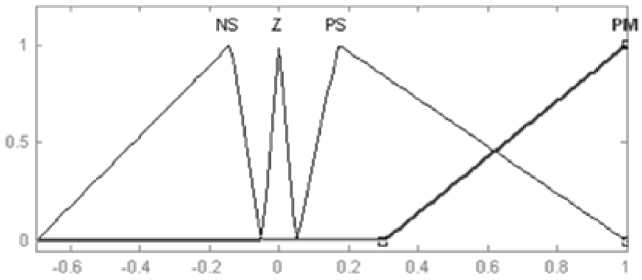
Второй выход НЛР. Терм-множество Т4 лингвистических переменных - имеет название термов: Т4=(КБ, 7, РБ, РВ}, означающие соответственно: «отрицательное малое», «нулевое», «положительное малое», «по-
ложительное большое». Диапазон управляющего воздействия [-0.7, 1]. Функции принадлежности приведены на рис. 5.38.
Третий выход НЛР. Терм-множество Т5 лингвистических переменных - имеет название термов: Т5=(РБ, РМ, РВ, РУБ) означающие соответственно: «положительное малое», «положительно среднее», «положительное большое», «положительное очень большое». Диапазон управляющего воздействия [0.1, 1]. Функции принадлежности приведены на рис. 5.39.
Рис. 5.39. Функции принадлежностей
корректирующего воздействия третьего
выхода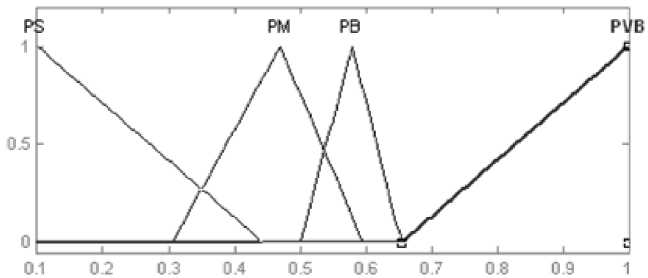
Содержательным компонентом блока нечёткого вывода является база знаний НЛР. Для заполнения первоначально пустой базы знаний, необходимо определить цели управления. Целью НЛР, как уже говорилось ранее, является корректировка сигнала управления.
Таким образом, будет обеспечиваться повышение быстродействия регулирующего воздействия и плавность изменения регулируемой величины.
В естественно-языковой форме управление будет иметь следующий
вид:
Если сигнал ошибки положительный и возрастает, то корректирующий сигнал у первого и второго выходов регулятора будет - положительный большой, а у третьего - положительный очень большой. Если положительный сигнал ошибки уменьшается, то корректирующий сигнал для
187
всех выходов также будет уменьшаться, оставаясь положительным. Если сигнал ошибки нулевой, то корректирующий сигнал - отрицательный или положительный малый (третий выход). Если отрицательный сигнал ошибки уменьшается по абсолютной величине, то корректирующий сигнал - нулевой или положительно средний (третий выход).
Базу знаний нечёткого регулятора целесообразно формировать в виде продукций. Получим множество управляющих правил, связывающих лингвистические значения входных и выходных переменных вида:
Если «ошибка 1» есть РВ, тогда «коррекция 1» есть РВ, «коррекция 2» есть РВ и «коррекция 3» есть РУБ;
Если «ошибка 1» есть Р8, тогда «коррекция 1» есть Р8, «коррекция 2» есть Р8 и «коррекция 3» есть РБ;
Если «ошибка 1» есть Ъ, тогда «коррекция 1» есть N8, «коррекция 2» есть N8 и «коррекция 3» есть Р8;
Если «ошибка 1» есть N8, тогда «коррекция 1» есть Ъ, «коррекция 2» есть Ъ и «коррекция 3» есть РМ.
Для рассматриваемой системы отсутствуют правила, содержащие анцендент с нулевой степенью принадлежности следовательно, можно сделать вывод о полноте правил управления.
Непротиворечивость системы управляющих правил обычно трактуется как отсутствие правил, имеющих сходные посылки и различные или взаимоисключающие следствия. Следовательно, можно судить о непротиворечивости системы управляющих правил.
Проверим созданную базу знаний нечёткого регулятора и рассмотрим переходный процесс системы с МНЛР. Графики переходных процессов системы представлены на рис. 5.40.
Рис. 5.40. Графики переходных процессов
измеряемых величин в системе с
МНЛР (1 - выход регулятора; 2 - ошибка; 3 -
производная ошибки)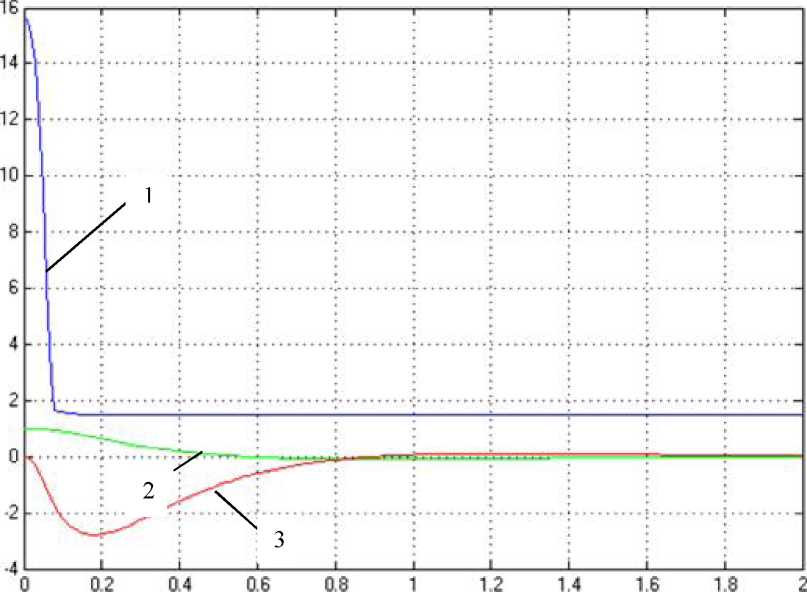
Из графика видно значительное уменьшение времени переходного процесса в системе с многокаскадным нечётким регулятором, по сравнению с классической системой и системой с НЛР. Длительность переходного процесса уменьшилась в 10 раз по сравнению с классической системой и в 2 раза по сравнению с системой с НЛР. Использование многокаскадно- сти в управлении позволило получить качественный переходный процесс без использования громоздких вычислительных процедур, необходимых для улучшения динамических характеристик как в классическом методе управления так и в нечёткой системе управления.
Сравнение систем, построенных с использованием различных методов
Рассмотрим динамические характеристики систем построенных с использованием различных методов.
На рис. 5.41 представлены переходные функции различных систем на выходе регуляторов.
Рис. 5.41. Графики переходных характеристик
исследуемых систем на выходе регуляторов
(1 - передаточная функция ПИД-регулятора;
2 - передаточная функция НЛР; 3 - передаточная
функция МНЛР)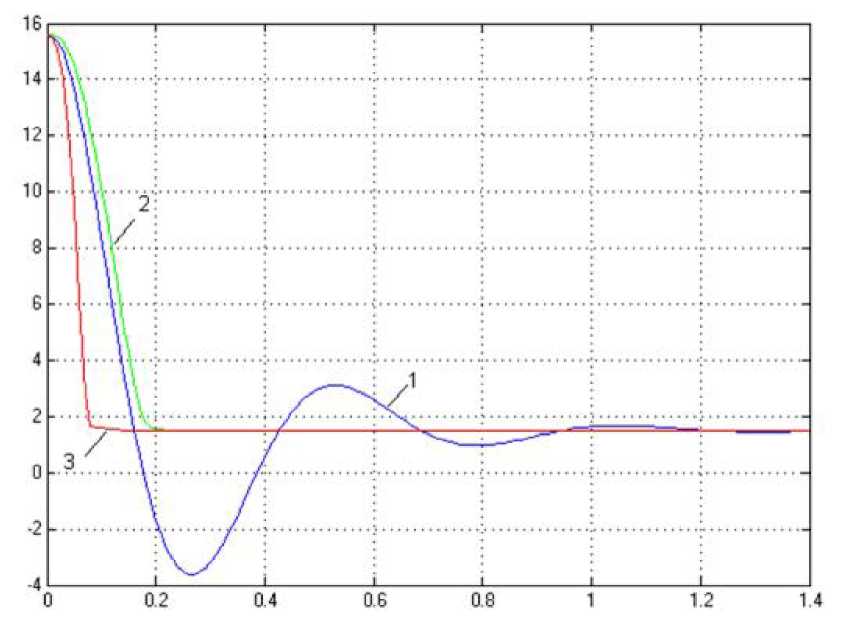
По результатам моделирования можно судить о заметном улучшении динамики системы. Результаты моделирования показывают значительное уменьшение времени переходного процесса систем построенных с использованием нечёткой логики. Для сравнения на рис. приведены три графика переходных процессов системы с ПИД-регулятором, с нечётким регулятором, а также система с многокаскадным нечётким регулятором. Переходный процесс классической системы является более затянутым и составляет
с. Быстродействие системы с НЛР в 6 раз выше, чем у классической (составляет 0,2 с), а системы с МНЛР в 10 раз (составляет 0,12 с).
Проведём сравнение реакции систем на различные воздействия (вариация параметров системы, возмущающих воздействий).
Рассмотрим влияние изменения параметров объекта управления путем варьирования постоянной времени Т=0,23 в пределах ± 10%. Рассмотрим изменение переходных процессов для различных систем.
Переходные процессы классической системы с ПИД-регулятором представлены на рис. 5.42.
Рис. 5.42. Графики переходных характеристик
системы с ПИД-регулятором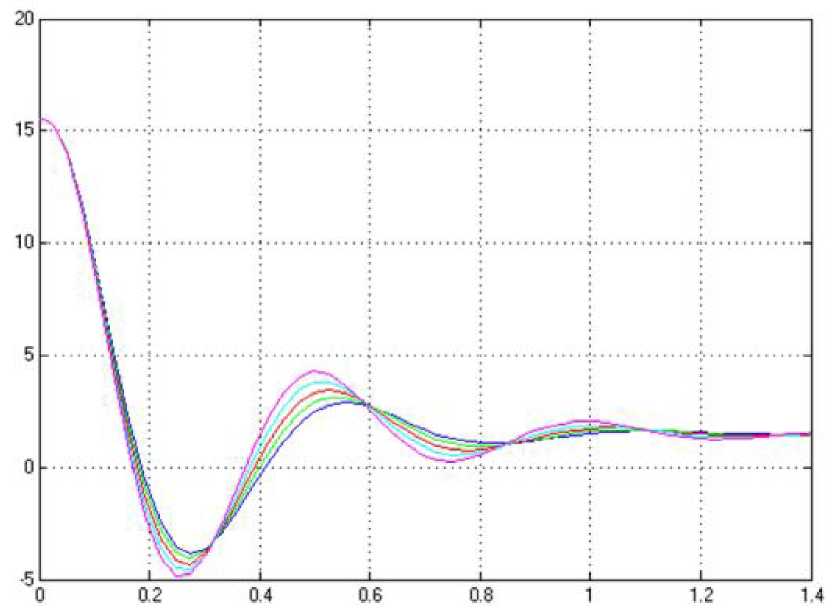
Переходные процессы системы с нечётким регулятором представлены на рис. 5.43.
Рис. 5.43. Графики переходных
характеристик системы с НЛР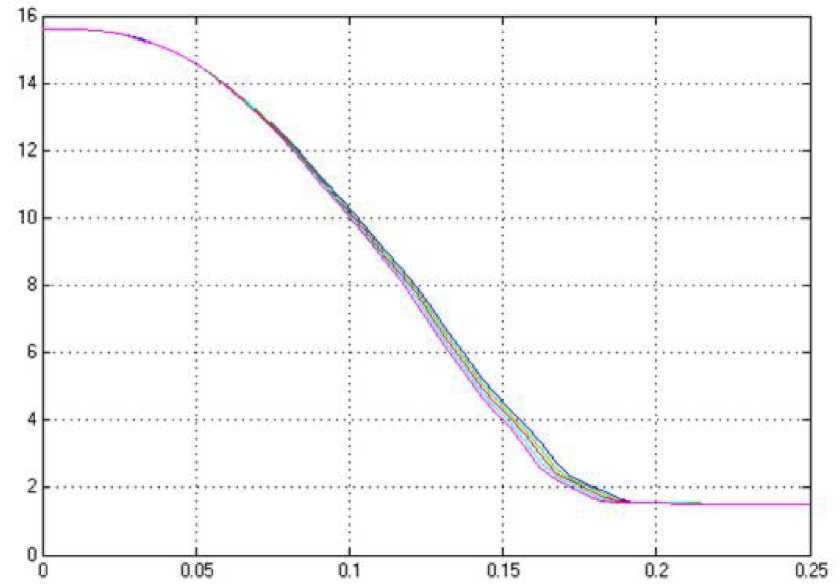
Рис. 5.44. Графики переходных характеристик
системы с МНЛР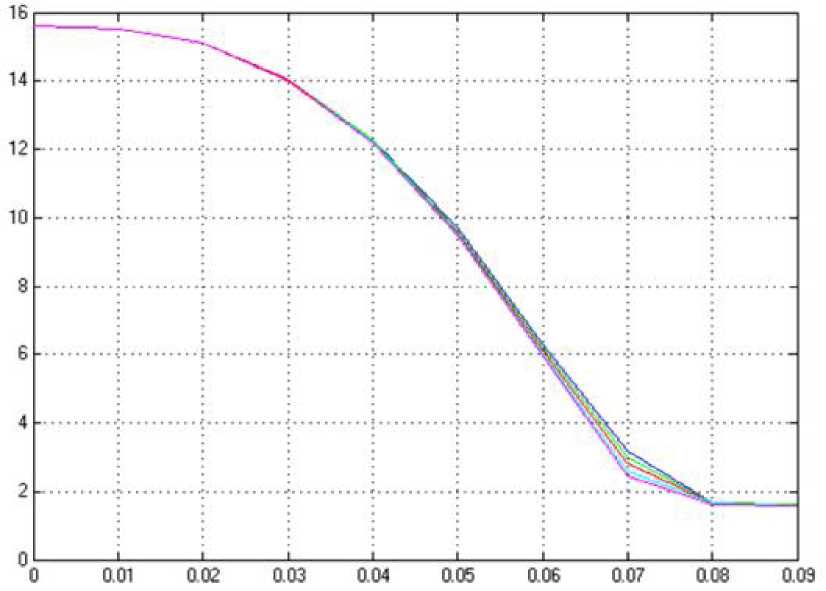
Переходные процессы исходной системы с многокаскадным нечётким регулятором представлены на рис. 5.44.
Из графиков видно, что система с ПИД-регулятором практически не чувствительна к изменению параметра Т. Хотя, с увеличением этого коэффициента, увеличивается колебательность системы. С уменьшение наоборот снижается колебательность, и
характеристики
для системы с ПИД- регулятором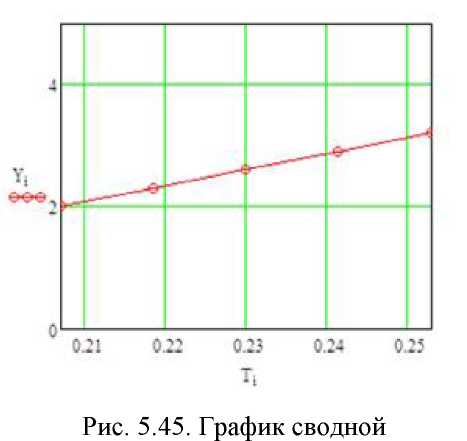
характеристики
для системы с НЛР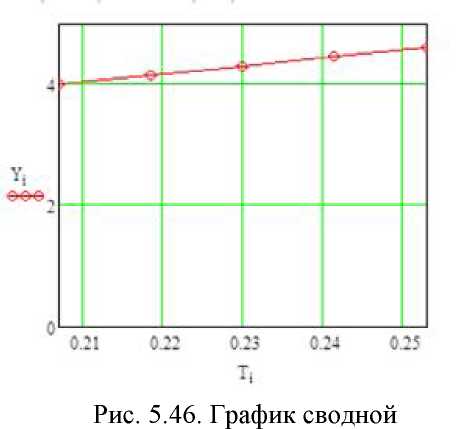
Сводная характеристика для системы с НЛР изображена на рис. 5.46, а для системы с МНЛР представлена на рис. 5.47.
Графики, приведённые на рисунках 5.44-5.47, ещё раз доказывают преимущества многокаскадной системы. Изменение постоянных параметров никак не влияет на величину выходной переменной в системе с МНЛР, в то время как в других исследуемых системах это изменение вполне заметно.
Подадим возмущающее воздействие на каждую из представленных систем. Переходные процессы представлены на рис. 5.48.
0.Л 0.22
из 0.24 0.25
Рис.
5.47.
График сводной характеристики для
системы с МНЛР
Таким образом, можно сделать вывод, что регуляторы, построенные по алгоритмам представленным в работе, выполняют наложенные на них требования:
- обеспечивают необходимый закон управления;
качественные показатели нечёткой системы управления удовлетворяют заданным требованиям;
регулятор реализуем, т.е. его алгоритмическая сложность не очень громоздкая;
Рис. 5.48. Графики переходных процессов
исследуемых системы при подаче
возмущающего воздействия: (1 - передаточная
функция
ПИД-регулятора; 2 - передаточная функция
НЛР; 3 - передаточная функция МНЛР)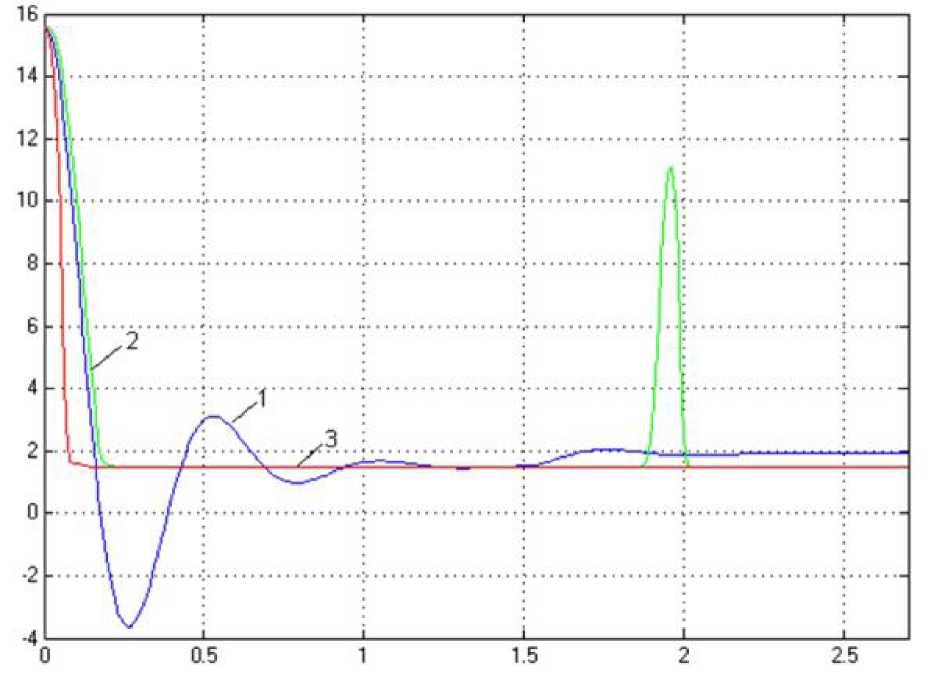
При этом сама система управления обладает определёнными свойствами. Она «слабочувствительна» к неточности математического описания объекта регулирования, к вариациям его параметров, а также к подаче недетерминированных возмущений, имеет возможность интерпретировать качественные характеристики параметров регулирования в количественные. Кроме того, повышение интеллектуальности системы приводит к существенному увеличению её быстродействия, не снижая динамическую точность.