

Глава 3. Классические методы синтеза систем управления с нечёткой информацией
В соответствии с существующей классификацией интеллектуализи- рованных СУ технологическими процессами, проектирование и исследование таких систем проводится с двух позиций - структурной и алгоритмической.
На структурном уровне анализируется целесообразность использования НЛР в том или ином тракте управления в зависимости от того, где и как проявляется неопределённость. При этом анализу подлежит способ реализации нечёткого управления:
нечёткое управление по дополнительному каналу управления;
непосредственное нечёткое управление по основному каналу управления;
комбинированное нечёткое управление.
На алгоритмическом уровне анализируется эффективность и целесообразность использования конкретного метода нечёткого вывода, а именно:
алгоритма Мамдани;
алгоритма Сугено;
гибридного алгоритма.
Нечёткое управление по дополнительному каналу
Для повышения динамической точности систем управления энергетическими процессами часто используют принцип динамической коррекции, заключающийся в том, что в системе, наряду с традиционным регулятором, используют дополнительный корректирующий тракт [2, 38, 60]. При этом в задачу дополнительного корректирующего тракта входит выработка вспомогательного управляющего воздействия, совместное действие которого с корректирующим сигналом основного регулятора обеспечивает требуемое качество динамических характеристик объекта регулирования. Однако такой принцип коррекции эффективен при условии линейности и неизменности параметров системы управления. В противном случае реализацию дополнительного тракта коррекции целесообразно перевести в область нечёткого управления. Поскольку основной контур регулирования представляет собой детализированную структуру, то при синтезе алгоритма управления нечётким корректирующим трактом желательно использовать известные из теории управления методы. В качестве последних могут быть использованы: метод параллельной коррекции (на основе желаемой передаточной функции параллельного корректирующего звена определяются основные параметры нечёткого корректора, а затем с помощью итерационного моделирования его алгоритм изменяется в сторону достижения желаемого качества регулирования), методы оптимального управления (на основе выбранного интеграла качества для детализированной структуры системы определяется требуемый вид управляющего воздействия, из него выделяется составляющая не реализуемая традиционным регулятором, по которой и находятся основные параметры нечёткого корректора) [33].
Отсюда задача синтеза нечёткого корректора переходит в область логических заключений и сводится:
выбору входных лингвистических переменных на основе анализа поведения замкнутой детализированной системы в оптимальном режиме;
назначению для каждой из лингвистических переменных набора термов;
выбору для каждого из термов аппроксимирующего нечёткого множества;
созданию базы правил корректора на основе анализа совокупности значений «входные переменные - управление», полученной для оптимального режима;
принятию адекватного механизма нечёткого вывода и выбору эффективного метода преобразования полученного нечёткого управления в «чёткий» выходной сигнал.
Более подробно приведённый алгоритм синтеза нечёткого канала коррекции рассмотрим на примере системы регулирования температуры перегретого пара [10, 30, 35].
Кратко охарактеризуем объект регулирования. Температура пара на выходе парогенератора относится к важнейшим параметрам, определяющим экономичность работы паровой турбины и энергоблока в целом.
Анализируемая СУ предназначена для стабилизации заданного температурного режима в паровом тракте котла за счёт регулирования впрыска собственного конденсата.
Паровой котёл современной электростанции имеет развитый пароперегреватель, состоящий из нескольких ступеней, отличающихся друг от друга расположением, протяжённостью и способом обогрева. От способа обогрева зависит характер основного возмущающего воздействия, действующего на данную ступень. Каждая ступень имеет свою собственную локальную систему регулирования температуры перегретого пара, призванную держать в заданном соотношении температуру пара на выходе из данной ступени. Возмущение, повлёкшее за собой отклонение температуры в одной ступени, последовательно отражается и на температуре в последующих ступенях пароперегревателя.
На температуру пара оказывает влияние большое количество факторов (нагрузка котла, шлакование топки, загрязнение поверхностей
61
нагрева, температура питательной воды, избытки воздуха, помол топлива и т.д.), часть из которых трудно или практически невозможно оценить количественно.
Модель объекта управления
Для барабанных парогенераторов наиболее распространён способ регулирования температуры первичного пара при помощи пароохладителей [45]. Современные котлоагрегаты оснащаются впрыскивающими пароохладителями. Принцип их действия основан на изменении энтальпии частично перегретого пара за счёт тепла, отбираемого на испарение охлаждающей воды, впрыскиваемой в паропровод.
Конструктивно участок регулирования перегрева образует часть поверхности нагрева пароперегревателя, включая обогреваемые и необогреваемые трубы, от места ввода охлаждающего агента до выходного коллектора, в котором необходимо поддержать заданную температуру.
Принципиальная схема существующей [46] автоматизированной СУ температуры перегрева первичного пара представлена на рис. 3.1.
Регулятор перегрева получает основной сигнал отклонения температуры пара на выходе пароперегревателя П и дополнительный - пропорциональный производной от температуры на выходе при изменениях энтальпии частично перегретого пара 1пр и исчезающий при Жпр/Ж=0.
К возмущающим воздействиям относятся энтальпия на входе в участок 1вх, расход потребляемого пара Бпп и количество тепла Q т, воспринимаемое от топочных газов. Выходной величиной участка является энтальпия на выходе из пароперегревателя 10. Регулирующим воздействием является расход охлаждения Отр.
Динамические характеристики пароперегревателя неодинаковы по каналам возмущающего и регулирующего воздействий, но обладают общим свойством - значительной инерционностью.
Пароперегреватель является объектом регулирования с распределёнными параметрами и описывается дифференциальными уравнениями нестационарного теплообмена. Для описания его динамики принимают ряд упрощающих предположений [28], а именно: плотность, давление, теплоёмкость пара и коэффициент теплоотдачи постоянны по всей длине пароперегревателя; изменение расхода пара приводит к изменению коэффициента теплоотдачи; в радиальном направлении стенки трубопроводов абсолютно теплопроводны; продольные тепловые потоки, связанные с теплопроводностью в паре и металле, не учитываются.
Рис. 3.1. Принципиальная схема существующей
автоматизированной СУ температуры
перегрева первичного пара (1 - барабан;
2, 3 - ступени пароперегревателя; 4 -
пароохладитель; 5 - регулирующий клапан
впрыска; 6 - охладитель пара; 7 - сборник
конденсата; 8 - гидрозатвор; 9 -
дифференциатор; 10 - регулятор)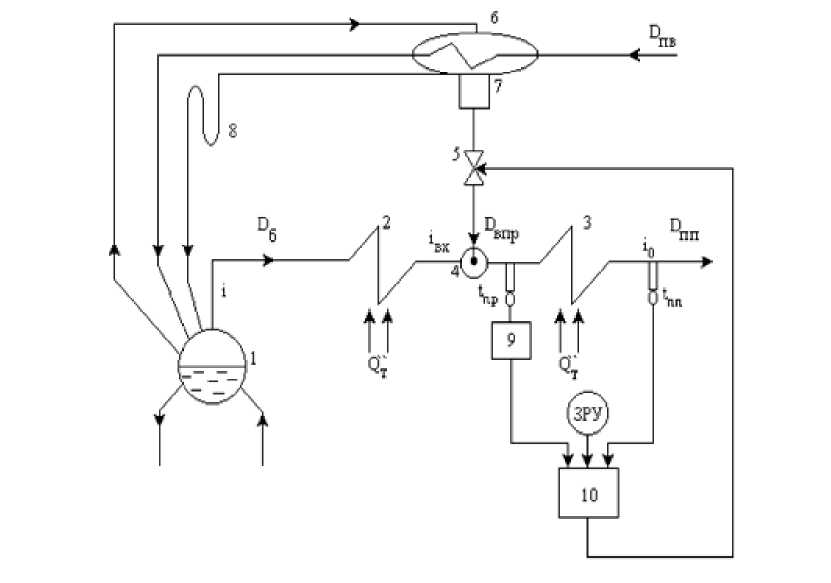
В [28] динамическая модель типовой автоматизированной СУ температуры перегретого пара реализована в виде звеньев структурной схемы,
передаточные функции которых получены экспериментальным путём (рис.3.2).
Для данной модели:
Жоп
(р)
к
оп
Топр
+
1
’
где Коп - коэффициент усиления передаточной функции опережающего участка, °С/(т/ч); Топ - постоянная времени передаточной функции опережающего участка, с.
(Тин
р
+ 1)
Ж„н
(р) =
к
ин
е
-рт
Рис.
3.2. Структурная схема типовой АСР
температуры
перегрева
пара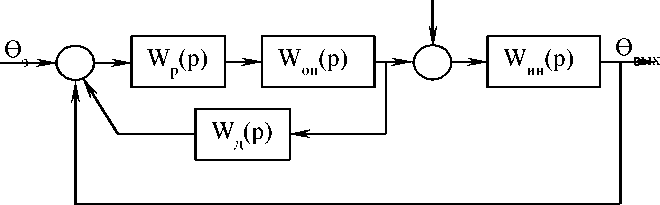
- Жд(р) - передаточная функция дифференциатора представляющая собой реальное дифференцирующее звено и служащая для упреждающей коррекции изменения температуры пара на выходе:
К д Р
Тд Р +1’
где Кд - коэффициент усиления, зависящий от аппаратной реализации дифференциатора и измерительного блока; Тд - постоянная времени дифференциатора, определяемая ручной подстройкой в режиме наладки.
- Жр(р) - передаточная функция регулятора, который управляет положением регулирующего клапана и реализует ПИ-закон регулирования, обеспечивающий исключение статической ошибки регулирования:
кр
(р) =
Тр Р
где Кр - коэффициент усиления регулятора,°С/(т/ч); Тр - постоянная времени регулятора, с.
- д3,, 0вых, ввозм - задание температуры на выходе пароперегревателя, реальная температура на выходе перегревателя и возмущение соответственно. Причём все виды возмущающих воздействий, отмеченных ранее, представлены в виде эквивалентного значения вво3м, которое может быть как положительным, так и отрицательным. Положительное значение возмущающего воздействия вво3м будет говорить о повышении тепловосприятия радиационными и конвективными поверхностями нагрева пароперегревателя или уменьшении расхода пара, и наоборот.
Следует отметить, что в дальнейшем рассматривается только режим стабилизации температуры перегретого пара, который можно отнести к режиму работы в «малом». Пуск системы, с поднятием температуры до заданной, осуществляется по принципу поэтапного повышения температуры
ввых и не может быть исследован с помощью приведённой структурной схемы.
Основным недостатком приведённой системы стабилизации является сравнительно невысокая динамическая точность при действии недетерминированных возмущений. Для повышения динамической точности в [10, 33] предлагается ввести в систему регулирования дополнительную коррекцию управляющего сигнала. Для этого сигнал ошибки регулирования дополнительно дифференцируют, затем полученное значение перемножают непосредственно с сигналом ошибки и вычисленное значение интегрируют. Проинтегрированное значение суммируют с сигналом ошибки, используя его в качестве корректирующего. Однако такой подход не обеспечивает достижения желаемого результата, в силу того, что параметры динамических звеньев структурной схемы в реальной системе не постоянны из-за учёта их физических особенностей (см. принимаемые допущения при математическом описании).
Поэтому более целесообразно использовать коррекцию стандартного регулятора в нечётком виде, как предложено в [39, 56].
Рассмотрим последовательно этапы синтеза нечёткого корректора, учитывая при этом, что коррекция динамической ошибки переносится из аппаратной области в информационно-программную.
Синтез нечёткого регулятора
Поскольку на нечёткое корректирующее звено возлагается задача выработки упреждающего корректирующего воздействия в диапазоне изменения динамической ошибки системы стабилизации, при синтезе нечёткого регулятора используем алгоритм вывода по Мамдани, как наиболее простой и интуитивный. Несмотря на то, что алгоритм Мамдани рекомендуют [3] применять в других областях, как-то экспертные системы и системы принятия решений, он может эффективно работать и
66
при разработке нечётких СУ технологическим процессом, что будет показано ниже.
Как показали исследования [57], при включении НЛР с алгоритмом Мамдани в анализируемую систему стабилизации целесообразно использовать его в качестве дополнительного канала управления, так как, для работы НЛР с данным алгоритмом в прямом канале управления потребовалось бы ввести в схему дополнительные динамические звенья.
Таким образом, НЛР с алгоритмом Мамдани выступает в качестве корректирующего элемента к основному закону регулирования.
Структурное решение показано на схеме (рис. 3.3). Здесь звено ДФ представляет собой динамический фильтр, выделяющий из сигнала ошибки е её производную по времени ё.е и подающий оба сигнала на НР. Ошибка регулирования и скорость её изменения являются наиболее информативными для данного процесса управления, так как реализуется коррекция для ПИ-закона регулирования [10, 30, 35 - 38].
Рис. 3.3. Структурная схема нечёткой
автоматизированной СУ температуры
перегрева пара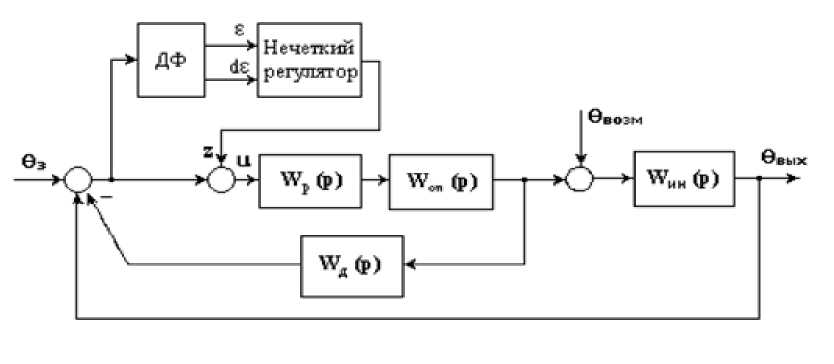
Нечёткий регулятор, включённый на параллельную коррекцию входного сигнала ПИ-регулятора, имеет два входа, один выход и вырабатывает сигнал коррекции г, в зависимости от состояния входных сиг-
67
налов e и de. С помощью сигнала коррекции нечёткий регулятор форсирует работу основного регулятора.
Как отмечалось в предыдущей главе, нечёткий регулятор состоит из трёх основных блоков: блока фаззификации, блока нечёткого вывода и блока дефаззификации.
В первом блоке необходимо произвести фаззификацию входных сигналов, т.е. перевести чётко определённые сигналы в нечёткую форму. Для получения нечётких переменных необходимо инициализировать нечёткие множества, соответствующие заданным входным сигналам.
Согласно [42], нечёткое множество A универсального множества E определяется как множество упорядоченных пар A{mA(x)/x}, где mA(x) - функция принадлежности, принимающая значения в упорядоченном множестве M. Функция принадлежности указывает степень принадлежности элемента x подмножеству A.
Необходимо отметить, что если M = [0,1], а A есть нечёткое множество, описываемое элементами из универсального множества E и множеством принадлежностей M, то нечёткое множество нормально, если его высота равна 1 (sup mA(x)=1). При mA(x) < 1 нечёткое множество называется субнормальным. Нечёткое множество является пустым, если VxeE mA(x)= 0. Непустое субнормальное множество можно нормализовать по формуле
m
л
(x)
= ma()
sup m A (x)
Нечёткое множество унимодально, если mA(x) = 1 только на одном
x из E.
Носителем нечёткого множества A является обычное подмножество со свойством mA(x) > 0, т.е. носитель A = {x/mA(x)>0} VxeE.
Элементы хеЕ, для которых ти(х)=0,5, называются точками перехода множества А.
Средством, позволяющим связать любую физическую величину с каким-либо множеством, качественно характеризующим её значения, является лингвистическая переменная.
Согласно [48, 49], для характеристики нечёткой переменной в отличие от лингвистической достаточно трёх параметров <а, X, А>, где а - наименование нечёткой переменной; X - область определения а; А - нечёткое множество на X, описывающее ограничения на значения нечёткой переменной а.
Тогда, для двух входных сигналов итеративным методом зададимся нормальными непустыми подмножествами А/ (/=1...2; _/=1...5) с равнозначными точками перехода для А/ и А/+1 на множестве Е Здесь индекс / соответствует количеству входов НЛР, а индекс ] - количеству используемых термов. Некоторый произвол при выборе количества термов обусловлен тем, что при возрастании количества термов возрастает объем базы правил, а существенного выигрыша в точности не наблюдается.
Формализуем лингвистические переменные р1 и Ьг, где для <81, Т1,
Х1, е, М> :
Ь - «ошибка»;
Т1 - {«отрицательная большая», «отрицательная средняя», «нулевая», «положительная средняя», «положительная большая»};
Х1 - [х1Ь х15];
G1 - процедура образования новых термов с помощью связок И/ИЛИ;
M1 - процедура задания на Xi=[xn, x15] нечётких подмножеств Л11 =
2 3
«отрицательная большая», Л1 = «отрицательная средняя», Л1 = «нулевая», Л14 = «положительная средняя», Л15 = «положительная большая».
Тогда для <02, T2, X2, G2, М2> :
ß2 - «скорость изменения ошибки»;
Т2 - {«отрицательная большая», «отрицательная средняя», «нулевая», «положительная средняя», «положительная большая»};
X2 - [x2b x25];
G2 - процедура образования новых термов с помощью связок И/ИЛИ;
М2 - процедура задания на X2=[x21, x25] нечётких подмножеств Л21 =
23
«отрицательная большая», Л2 = «отрицательная средняя», Л2 = «нулевая», Л24 = «положительная средняя», Л25 = «положительная большая».
Иллюстрация этапа формализации представлена на рис. 3.4, при этом вид функций принадлежности принят линейным, а их распределение равномерным, поскольку упреждающая коррекция НР должна быть равнозначной во всем диапазоне изменения динамической ошибки системы стабилизации.
На рис. 3.4 используются следующие входные лингвистические переменные:
e1 - «ошибка»; е2 - «скорость изменения ошибки».
Значение лингвистических переменных:
ОБ{ - «отрицательная большая»;
OCi - «отрицательная средняя»;
Hi - «нулевая»;
ПС( - «положительная средняя»; ПБ{ - «положительная большая».
Рис. 3.4. Функции принадлежности
лингвистических переменных а) «ошибка»
б) «скорость изменения ошибки»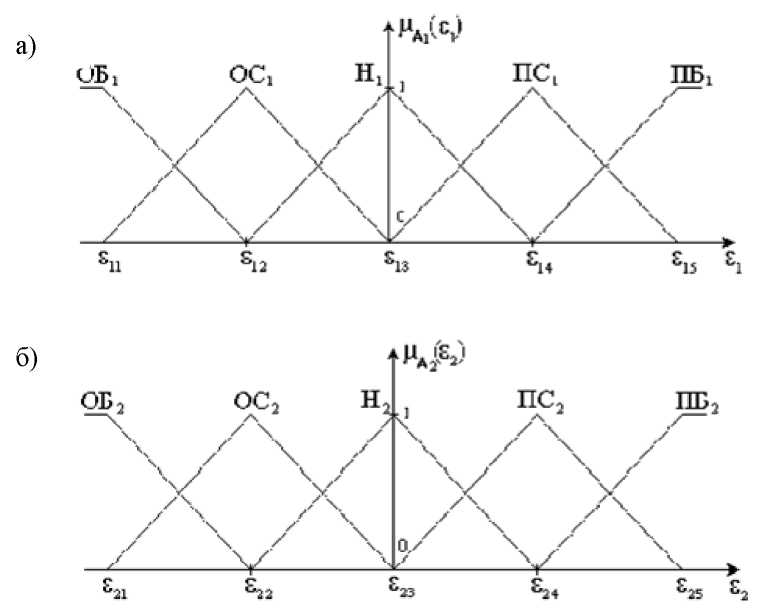
В терминах функций принадлежности результат этапа фаззифика- ции как значения лингвистических переменных запишется:
А=[тоБ(хг)/ОБ, тос(х)юси тНх'1)1ни дпсСх-упс, тшХупБ].
Содержательным компонентом блока нечёткого вывода является база знаний НЛР. Для заполнения первоначально пустой базы знаний, необходимо определить цели управления.
В данном случае целью управления является поддержание заданной температуры перегретого пара при возникновении контролируемых и не контролируемых возмущений. При этом чем быстрее увеличивается отклонение температуры от заданного значения, тем интенсивнее должна осуществляться форсировка для максимально быстрой компенсации возникшего возмущения.
Таким образом, обеспечивается повышение быстродействия регулирующего воздействия и плавность изменения регулируемой величины вблизи заданного значения при изменении возмущающих воздействий быстрыми темпами.
В естественно-языковой форме управление будет следующим.
Если сигнал ошибки положительный и возрастает, то корректирующий сигнал - положительный, а величина его пропорциональна величине скорости изменения ошибки. Если положительный сигнал ошибки уменьшается, то корректирующий сигнал - нулевой. Если сигнал ошибки отрицательный и возрастает по абсолютной величине, то корректирующий сигнал - отрицательный, а величина его пропорциональна величине скорости изменения ошибки. Если отрицательный сигнал ошибки уменьшается по абсолютной величине, то корректирующий сигнал - нулевой.
Базу знаний нечёткого регулятора целесообразно формировать в виде продукций [14, 48, 50]. Получим множество управляющих правил, связывающих лингвистические значения входных и выходных переменных вида:
ЕСЛИ «ошибка» есть А/ И «скорость изменения ошибки» есть А2
ТО «коррекция» есть В,
где «коррекция» - наименование выходной лингвистической переменной
<г, Т3,Х3, G3, М3>, инициализированной, как показано на рис. 3.5.
Рис. 3.5. Функция принадлежности
лингвистической переменной «коррекция»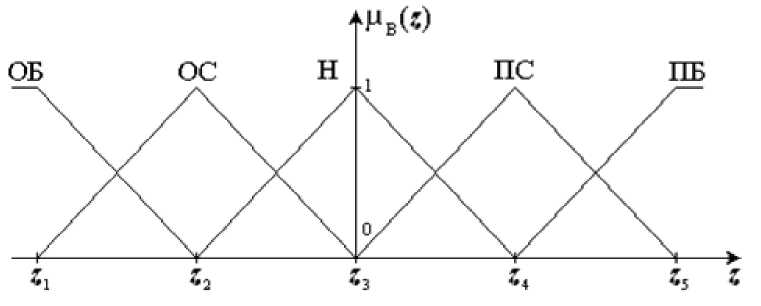
Для обеспечения однозначности между входной и выходной нечёткими переменными распределение функций принадлежности лингвистической переменной «коррекция» примем равномерным по диапазону её изменения.
Зададим полный набор правил в таблице 3.1.
Таблица 3.1
База правил нечёткого логического
регулятора
№
«ошибка»в1
«скорость изменения ошибки»е2
«коррекция»«
1
ОБ
ОБ
ОБ
2
ОС
ОС
ОС
3
Н
Н
Н
4
ПС
ПС
ПС
5
ПБ
ПБ
ПБ
Преобразуем области определений лингвистических переменных так, чтобы минимальное значение хц отобразилось в 0, т.е. [хц, хг-5]®[0, х5- Хц]. Произведём нормирование на единицу, т.е. [0, хг-5-Хц]®[0, 1]. Тогда значения лингвистических переменных будут задаваться нечёткими подмножествами на шкалах Ец Е2, 2 табл. 3.2.
Таким образом, области значений лингвистических переменных
представляются девятью точками.
Таблица 3.2
Функции принадлежности лингвистической
переменной
0
0,125
0,25
0,375
0,5
0,625
0,75
0,875
1
ОБ
1
0,5
0
ОС
0
0,5
1
0,5
0
Н
0
0,5
1
0,5
0
ПС
0
0,5
1
0,5
0
ПБ
0
0,5
1
Основной задачей блока нечёткого логического вывода (по алгоритму Мамдани) является получение множества значений функций принадлежности для термов выходного сигнала, исходя из имеющегося множества значений функций принадлежности для термов входного сигнала.
С помощью правил преобразования дизъюнктивной и конъюнктивной форм описание системы можно привести к импликативному виду X® У, где X и У - универсальные множества входных и выходных переменных. Совокупность импликаций отражает функциональную взаимосвязь входных и выходных переменных и является основой для построения нечёткого отношения Я:(Х®У), заданного на произведении (X х У).
Если на множестве X задано нечёткое множество А, то композиционное правило вывода В = А • Я определяет на У нечёткое множество В с функцией принадлежности [14, 51]:
В в (У) = и (в А (Х) Л В Я (- У)) .
X
Таким образом, композиционное правило вывода в этом случае задает закон функционирования нечёткой системы.
Для рассматриваемой системы приведём управляющие правила к виду ЕСЛИ (А/ х Л2) ТО В, где (Л/ х А2) - декартово произведение нечётких множеств А] и Л2, заданных на шкалах Е/ и Е2 с функцией принадлежности:
т (А/х аі)(є 1>є 2 )= т А, (є 1 )л т м(е 2),
определённой на Е]хЕ2.
Для каждого из правил вида ЕСЛИ (А/ х Л2) ТО В, где (А/ х Л2) - входное нечёткое множество, а В - соответствующее выходное нечёткое множество, определим нечёткое отношение В=(А/ х Л2 )х В, і = 1.. .5 с функцией принадлежности:
тк, ((є,є 2), г) = (т і (єі) л т, (є 2 ))л тв, (?).
Совокупности всех правил соответствует нечёткое отношение:
5
В = и в1,
і=1
с функцией принадлежности:
5
т в (є і,є 2, ?)=и т в,((е і’є 2)?).
і=і
При заданных значениях входных переменных А/, Л2 корректирующее значение выходной переменной В определяется на основе композиционного правила вывода:
В = (А/ х А2) • В,
со степенью принадлежности:
тВ,(г)= и и (тЛі(£і)лтлі(є2))лтв(еиє2,*)
ЄіЄЕі є2 єЕ2 1 2
После процедуры нечёткого вывода, для получения реального выходного сигнала нечёткого регулятора, необходимо осуществить процесс дефаззификации - перевод нечёткого значения z в чёткое значение z.
Исходя из гипотезы о том, что G определяется на конечном множестве высказываний U={ui,...un], числовое значение z по методу центра тяжести можно получить согласно выражению:
N
Е zn т в (zn)
ry П = 1
= N
Е тв (zn)
n=1
где N= 9 - количество точек в Z (табл. 3.2).
Оценим базу знаний нечёткого регулятора на оптимальность через такие показатели, как полнота и непротиворечивость правил управления [43, 44, 48]. Наиболее часто требование полноты для системы продукций сводится к виду:
X = U SUPP Л;
i=1
где Supp Л; - носитель нечёткого множества Л;.
Это означает, что для каждого текущего состояния x процесса существует хотя бы одно управляющее правило, посылка которого имеет ненулевую степень принадлежности для x.
Для рассматриваемой системы отсутствуют правила содержащие анцендент с нулевой степенью принадлежности (в табл. 3.2 нет столбцов, содержащих во всех ячейках только нули), следовательно, можно сделать вывод о полноте правил управления.
Непротиворечивость системы управляющих правил обычно трактуется как отсутствие правил, имеющих сходные посылки и различные или взаимоисключающие следствия.
Степень непротиворечивости _/-го и к-го правил можно задать величиной:
с]к = | иомз)Л т* (£1>)- и(;М£2) лт* (£2))1
Е л л е2 2 2
Суммируя по к, получаем оценку непротиворечивости _/-го правила в системе:
С = 1См , 1<)<5 .
к=1
Если эта оценка превосходит некоторое пороговое значение, то правило из системы удаляется.
С12
= 0.5 - 0.5 = 0.
С24
= 0 - 0 = 0
С13
= 0 - 0 = 0
С25
= 0 - 0 = 0
С14
= 0 - 0 = 0
С15
= 0 - 0 = 0
С35
= 0 - 0 = 0
С23
= 0.5 - 0.5 = 0,
С45
= 0.5 - 0.5 = 0
Тогда:
С1 = С2 = С3 = С4 = С5 = 0
То есть можно судить об абсолютной непротиворечивости системы управляющих правил.
Для оценки эффективности предложенного способа нечёткой коррекции системы стабилизации на рис. 3.6 приведены результаты моделирования в среде «MATLAB» фирмы «The MathWorks Inc.» исходной системы и системы с синтезированным корректором. При этом моделирование производилось на основании экспериментальных данных автоматизированной СУ температуры перегретого пара Комсомольской ТЭЦ-3. На рис 3.6 приведены 1 - график переходного процесса некорректированной системы (см. рис 3.2); 2 - с учётом нечёткой коррекции (см. рис 3.3).
Из графика видно, что применение нечёткого корректирующего регулятора уменьшает как время реакции СУ температурой на внешнее возмущение, так и величину динамической ошибки (падение температуры уменьшается примерно на 30 %), а это в конечном итоге, повышает экономичность работы, как турбины, так и энергоблока в целом.
Рис. 3.6. Результаты моделирования АСР
температуры перегретого пара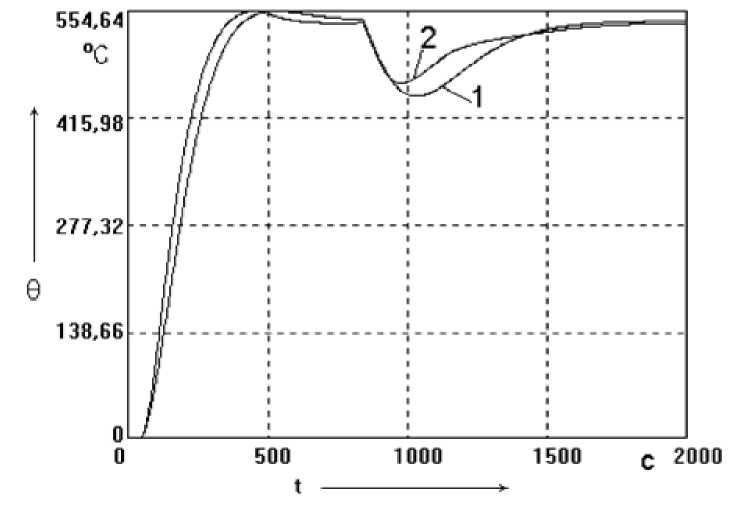
Использование в цепи обратной связи системы стабилизации звена реального дифференцирования с элементами ручной подстройки для реализации режима упреждающей коррекции в ходе эксплуатации системы приводит к изменению соотношения постоянных времени дифференцирующей и инерционной частей звена, что, в конечном итоге, скажется на увеличении времени отработки возмущающих воздействий.
На рис. 3.7 приведены интегральные кривые изменения времени отработки возмущающих воздействий при различных соотношениях вышеупомянутых постоянных времени для исходной и системы с нечёткой коррекцией, которые получены по результатам моделирования.
Рис. 3.7. Интегральные кривые изменения
времени отработки возмущающих
воздействий.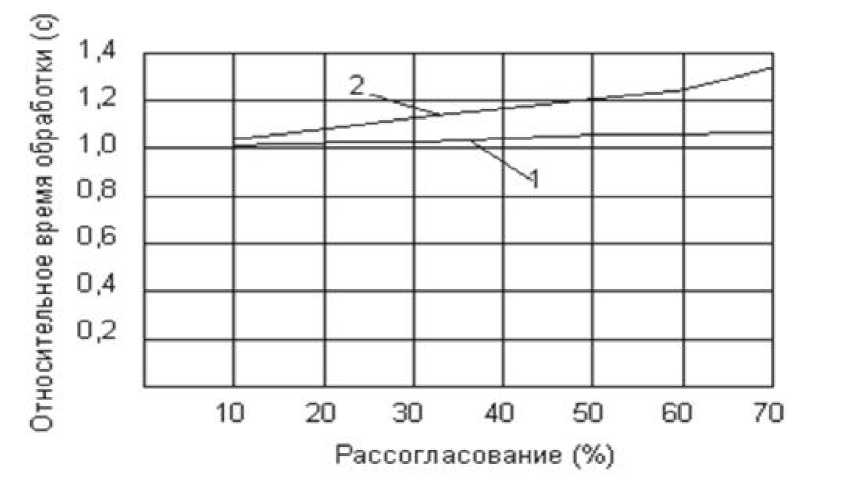
Как следует из приведённых кривых, введение нечёткой коррекции (нижняя кривая) обеспечивает время отработки возмущающих воздействий системой стабилизации примерно на одном и том уровне, независимо от соотношения постоянных времени. Таким образом, результаты моделирования подтверждают правомерность выбранного подхода к синтезу системы регулирования температуры и эффективность данного принципа коррекции.
Безэкспертные методы синтеза систем управления с нечёткой информацией
Оптимизация распределения функций
принадлежности НЛР
Анализ систем управления с нечёткими регуляторами говорит о том, что качественные показатели выходных координат системы управления тепловыми процессами с НЛР зависят не только от количества функций принадлежности нечёткого регулятора, их вида, но и от распределения их по диапазону регулирования. Задача выбора вида функций принадлежности, распределения их по диапазону изменения входной координаты обычно возлагается на эксперта проектирующего НЛР и носит субъективный характер. Ниже рассматривается метод оптимизации распределения функций принадлежности НЛР по диапазону изменения входной координаты регулятора, позволяющий исключить субъективные факторы проектирования НЛР.
Объекты регулирования тепловых технологических процессов характеризуются существенной нелинейностью, наличием транспортного запаздывания и значительной инерционностью звеньев регулирования [7, 13, 23, 24, 63]. При этом формализация их математического описания связана со значительными погрешностями, в то же время часть параметров системы может быть описана не в количественных величинах, а в качественных. Это указывает на целесообразность реализации таких систем управления по нечёткому принципу.
Полагая, что динамика нечёткой системы управления тепловыми процессами описывается системой нелинейных дифференциальных уравнений вида [59]:
.;(£) = Д?)х(£ - т) + В(?)м(?) + G(^)w(^ - в) + Н(;(£)),
где А(?) - матрица системы, Б(?) - матрица управления, G(^) - матрица возмущений, х(?) - координаты состояния системы, и(?) - сигнал управления, w (?) - возмущающее воздействие, т - величина запаздывания обусловленная внутренними параметрами объекта управления, в - величина запаздывания обусловленная внешними возмущающими воздействиями, Н(х(?)) - составляющая, обусловленная нелинейными свойствами объекта регулирования, а НЛР, построенный по принципу Мамдани реализуется на основе трёх основных этапов фаззификация, база знаний (БЗ), дефаззифи- кация, то продукционные правила для случая с и-мерным входом и одномерным выходом НЛР могут быть записаны в виде:
Посылка: Если х1 есть Ат 1 и ... и хп есть Атп Правило: Если Х1 есть А1! и ... и хп есть А1п то и есть Б1 Вывод: и есть Б ,
Т
где [Х1,х2,...,хп ] = х - вектор входного сигнала, и - скалярная величина
сигнала управления. X является универсумом для каждой лингвистической переменной хг, а и - соответственно универсумом и. Обозначая значения
г-ых лингвистических переменных хг и и через Ау и Б] , ] = 1, т соответственно получим значения функции принадлежности ц А у (х): Хг ® [0,1] и
Аг
тБ](и): и ® [0,1].
Нечёткое отношение для каждого продукционного правила определяется следующим образом:
(А 1 и А 2 и ... и А п)^Б] ,
тК] (*1, х2 хп,и) = тА](хі)тА](х2 )-тА] (хп )тБ](и),
нечёткое отношение Б для т правил определяется согласно выражению:
т
т Б (*1, х 2,..., *п , и) = тах т Б] (хь X 2,..., *п , и).
]=1 Б
В
случае, когда лингвистические переменные
входного сигнала принимают нечёткие
множества Д,7 = 1, п
нечёткое множество В лингвистической
переменной сигнала управления
определяется при помощи нечёткой
импликации. Функция принадлежности
для В имеет вид:
т
В
О)
п
п
“Г
П т
Д
(х7
)
тах
_ 1=1
П т
Д1
(Х7
)
_7=1
7 _
•т
в1
—'
^
тах
х1,
х2
5*"' ,хп
Пусть
нечёткие подмножества В1
имеют вид:
т
В
(и)
1,
и
= 1
0,
и
Ф1
где
1
- дискретные численные значения выходного
сигнала* Тогда с учётом этого:
т
В (и)
На
этапе дефаззификации применяя метод
центральной площади, получим выражение,
определяющее значение выходного
сигнала:
т
и
=
1=1 и=1
т
п
^
П т
Д1
(Х7
)
1=17=1 7
Обозначим:
п
П
т
Д1
(Х7
)
7=1 7
т
п
2 П т
Д1
(Х7
)
1=17=1 7
тогда
формула определения выходного сигнала
НЛР (сигнала управления) будет иметь
вид:
_ т .
и(X, 1) = ^ 1С у (X) = 1 С (X).
у=1
Таким образом, в случае полноты и непротиворечивости БЗ, согласно полученному выражению НЛР может быть описан в виде произведения двух функций определяемых видом и распределением по диапазону регулирования функций принадлежности и выбранным алгоритмом нечёткого вывода.
Если положить, что объект управления описывается упрощёнными математическими выражениями и известны критерии оптимизации, то можно найти выражение для желаемого управляющего воздействия обеспечивающего требуемые показатели качества. В общем виде, функционал качества, на основании которого может быть получено требуемое управляющее воздействие, имеет вид:
¥г
= /[
где т, с - постоянные коэффициенты, Ф(£) - произвольная дифференцируемая или кусочно-непрерывная функция и Ф(0) = 0, у(Ф) - однозначная, непрерывная, дифференцируемая "Ф функция, при чем у(0) = 0 и у(Ф) • ¥ < 0 при "Ф Ф 0.
1
1
г?
го
1
-1
г
ь
1
а
і
и
= -
1
Т
г(ф)+
Т
к=1
дФ
( X
)
дхк
1к(х)
•
Если считать, что база знаний полна и непротиворечива, то НЛР позволяет реализовать требуемый закон управления максимально приближенный к желаемому и зависящий от Я и £(X)• Положив, что вектор
= const, синтез НЛР можно свести к оптимальному распределению функций принадлежности при их фиксированном числе.
Поскольку вид ФП и их распределение по диапазону регулирования описываются логическими элементами, то для синтеза НЛР целесообразно использовать математико-логический подход с применением универсальной шкалы, предложенной в [49].
Задача синтеза должна сводиться к отысканию такого вида и формы ФП, которые при выше приведённых допущениях обеспечивали бы, на основании принятого алгоритма нечёткого вывода, требуемый вид управля - ющего воздействия.
При известном управляющем воздействии, заданном входном сигнале регулирования, задача будет заключаться в нахождении желаемой функции отображения [48, 52]. Для поиска функции отображения введём ряд ограничений.
Будем считать, что реализация желаемого закона управления осуществляется по одному входному сигналу НЛР. Второй входной сигнал НЛР может быть учтён впоследствии, как корректирующий.
Поскольку для практического большинства используемых устойчивых систем управления тепловыми процессами вид динамических переходных характеристик может быть сведён к двум типам: апериодическому и колебательному, то дальнейшие рассуждения будем проводить для этих случаев.
у
X
Рис.
3.8. Обобщённая координатная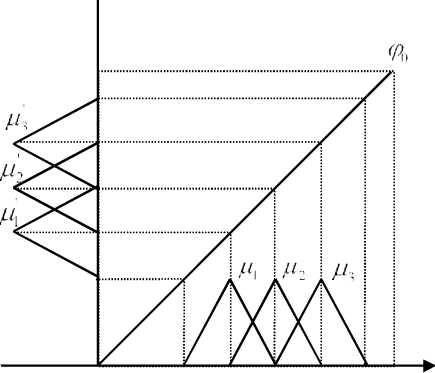 Для
доказательства этого рассмотрим систему
координат (рис.3.8), правая часть которой
представляет собой единичный квадрат
x
®
[0;1] и y
®[0;1].
Для
доказательства этого рассмотрим систему
координат (рис.3.8), правая часть которой
представляет собой единичный квадрат
x
®
[0;1] и y
®[0;1].
система
Диагональ этого квадрата является базовой функцией отображения %0 или осью отображения, при которой равномерно распределённые по оси абсцисс ФП, отражаясь на ось ординат, не претерпевают никаких изменений. Пусть спрогнозированный или полученный из каких-либо других соображений выходной сигнал НЛР, являющийся сигналом управления имеет вид рис. 3.9 а, б.
Рис
.3.9. Законы управления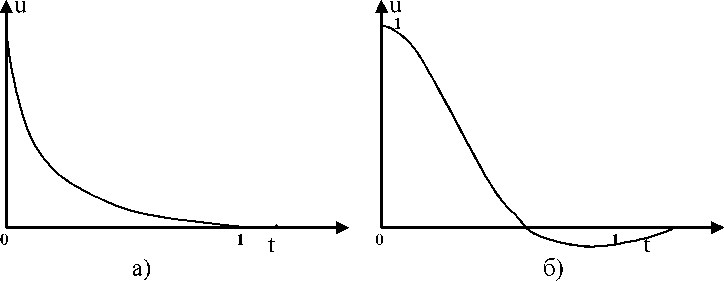
Рис.3.10.
Преобразованный сигнал управления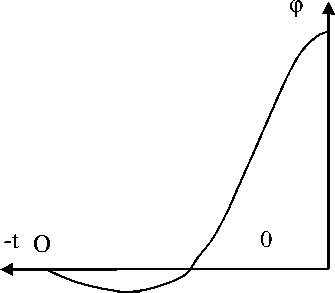
Ф - функции отображения. Такой касательной является ось абсцисс на рис. 3.11.
Рис.
3.11. Координатная система отображения
функций принадлежности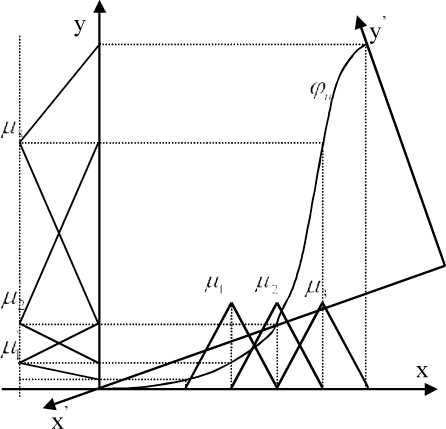
Поскольку в окрестности начала координат, синтезируемые ФП стягиваются в линию, то процесс их построения (при количестве ФП больше 9), целесообразно завершить при попадании значения х в зону соответствующую классической зоне завершения переходного процесса. С другой стороны применение большого числа ФП (> 9 ) является неоправданным, т.к. приводит к значительному росту алгоритмической сложности НЛР, и обрабатываемой информации.
Данный алгоритм оптимизации распределения функций принадлежности НЛР реализован в виде программного обеспечения [58]. Средой разработки является язык технических вычислений Ма1;ЬаЬ. Этот выбор обусловлен наличием соответствующего встроенного инструментария.
Разработанная программа позволяет не только автоматизировать процесс настройки НЛР, но и проводить исследование систем управления с нечётким управлением. Пользователь имеет возможность по задаваемой аналитически или полученной при моделировании желаемой переходной характеристике управляющего сигнала для произвольно числа функций
принадлежности получить оптимальную настройку блоков фаззификации и дефаззификации нечёткого логического регулятора и далее исследовать анализируемую систему на модели в среде Ма1;ЬаЬ.
Пример экранной формы интерфейса пользователя приведён на рис. 3.12.
Таким образом, приведённая методика синтеза алгоритма решает одну из проблем автоматизации основных этапов настройки НЛР (фаззи- фикация, дефаззификации). Предлагаемый подход позволяет получить желаемые показатели качества регулирования за счёт применения средств вычислительного интеллекта без потерь точности.
Рис. 3.12. Интерфейс пользователя программы
МаШаЪ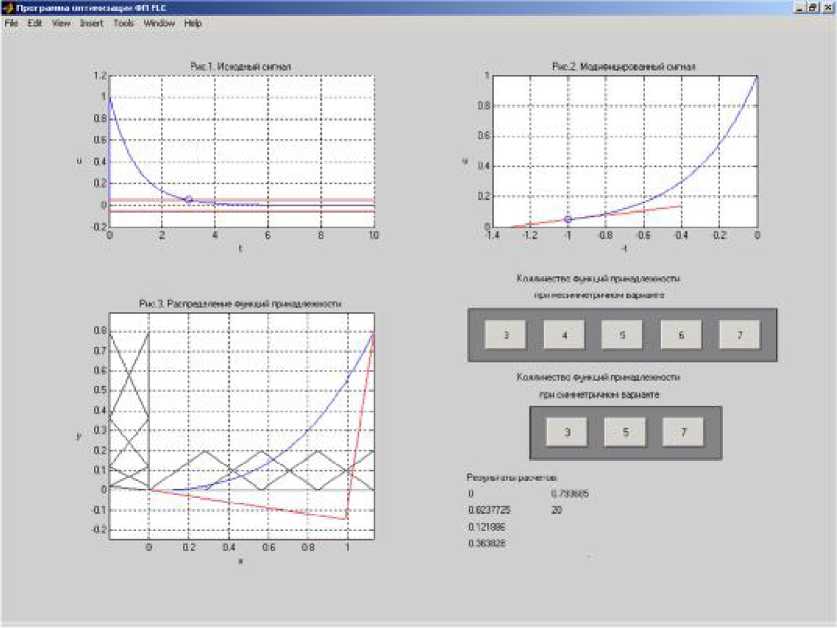
Синтез НЛР по прямым показателям качества
Как было отмечено ранее, синтез НЛР состоит из настройки трёх
взаимосвязанных блоков (фаззификация, БЗ, дефаззификация), при этом
формирование второго блока базируется на методах представления и по-
87
иска знаний. Основная роль в этом процессе отдаётся оператору-эксперту, в качестве которого выступает квалифицированный специалист или знающий данную предметную область инженер. Т.е. и в данном случае процесс составления БЗ носит субъективный характер.
Важным условием эффективного функционирования НЛР является построение непротиворечивой и оптимально полной БЗ. При этом зачастую, адекватность БЗ зависит от величины среза объёма выборки экспертных оценок, что является в большинстве случаев взаимоисключающим фактором.
Как известно из теории экспертных систем [31, 40, 41, 61], функционирование БЗ осуществляется с надстроенной машиной логического вывода (МЛВ), которая представляет собой механизм рассуждений, оперирующий знаниями и с целью получения новых знаний. Для этого обычно используется программно реализованный механизм дедуктивного логического вывода (какая-либо его разновидность) или механизм поиска решения в сети фреймов или семантической сети. МЛВ может реализовывать рассуждения в виде:
дедуктивного вывода (прямого, обратного, смешанного);
нечёткого вывода;
вероятностного вывода;
поиска решения с разбиением на последовательность подзадач;
поиска решения с использованием стратегии разбиения пространства поиска с учётом уровней абстрагирования решения или понятий, с ними связанных;
монотонного или немонотонного рассуждения,
рассуждений с использованием механизма аргументации;
ассоциативного поиска с использованием нейронных сетей;
вывода с использованием механизма лингвистической переменной.
Задачи принятия решений в условиях определённости характеризуются наличием полной и достоверной информации о проблемной ситуации, целях, ограничениях и последствиях принимаемых решений. В таких задачах заранее, в процессе анализа, известно, к какому исходу приведёт каждая из стратегий. В частности, это означает, что все факторы известны, учтены и не могут каким-либо непредвиденным образом повлиять на исход операции. В этом случае МЛВ настраивается на работу с классическими методами, такими как фреймы и механизмы дедуктивного логического вывода.
В отличие от отмеченного, характерной особенностью задач принятия решений в условиях неопределённости является то, что исход операции зависит не только от экспертов (лиц принимающих решения) и фиксированных факторов, но и от слабо определённых показателей, неконтролируемых экспертами и (или) недостоверно известных им в момент принятия решения. В результате каждая экспертная стратегия оказывается связанной с множеством возможных исходов итоговой операции, что существенно усложняет процедуру выработки решения. Для приведённого класса задач наилучшим образом подходит настройка МЛВ на нечёткий вывод.
Должное функционирование МЛВ, настроенной на нечёткий вывод, требует при формировании и обновлении БЗ соответствующих экспертных стратегий. Поэтому является необходимым проанализировать основные экспертные стратегии с соответствующими критериями оценок, позволяющие обеспечить адекватное решение поставленной задачи в условиях неопределённости:
Согласно минимаксному критерию Вальда, оптимальным считается вариант решения, в случае, когда составление продукционных правил БЗ определяет вариант наихудшей настройки реакции системы (установка системы на границу устойчивости). При этом аналитически он может быть представлен как:
vw = max min aij-, i j
где aij - величина весового коэффициента продукционного правила. Данный критерий отражает позицию крайнего пессимизма, т.е. всегда ориентируется на худшие условия, обеспечивая тем самым избыточность БЗ.
Максиминный критерий представляет собой критерий абсолютного оптимизма и связан с потерей части информации о системе:
vM = max min aij- i j
Для Критерия двойственности Гурвица характерно то, что при выборе правила из БЗ, вместо двух граничных решений при оценке ситуации, необходимо придерживаться некоторой промежуточной позиции, учитывающей возможность как наихудшего, так и наилучшего, благоприятного поведения системы. Согласно данному подходу, для каждого правила необходимо определить линейную комбинацию минимальных и максимальных значений консеквента и выбрать ту комбинацию, для которой эта величина окажется наибольшей:
vH
=
max
i
i
j J
где a - «степень оптимизма» , 0< a <1 (при a=0 критерий Гурвица тождественен критерию Вальда, а при a=1 совпадает с максиминным решением). При этом, на выбор значения степени оптимизма оказывает влияние мера ответственности: чем серьёзнее последствия ошибочных решений, тем больше желание принимающего решение застраховаться, т.е. степень оптимизма a, как правило, ближе к нулю.
Критерий Сэвиджа в общем виде является критерием риска min- max. Зачастую на практике [18], выбирая одно из возможных правил, останавливаются на том, осуществление которого приведёт к наименее тяжё-
лым последствиям, если выбор окажется ошибочным. По принципу Сэвиджа выбор каждого правила характеризуется величиной дополнительных потерь, которые возникают при реализации этого правила, по сравнению с бездействием системы в данном состоянии. При этом правильное решение не влечёт за собой никаких дополнительных потерь, и величина этих потерь равна нулю. Таким образом, при выборе правила, следует принимать во внимание только дополнительные потери, которые являются следствием ошибок выбора. Для формализации задачи принятия решения строится так называемая «матрица рисков», элементы которой показывают, какой недостаток получится в результате выбора неоптимального правила. Степень риска субъекта Гу при выборе величины весового коэффициента продукционного правила называется разность между максимальным результатом от действия правила у, который можно получить в этих условиях и результатом, который получит субъект в тех же условиях, в случае действия правила і. Если бы субъект знал заранее будущую реакцию системы на правило у, он выбрал бы стратегию, которой соответствует максимальный элемент в данном столбце: таха.., тогда степень риска равняется
і J
= maxatj - aj. Таким образом, критерий Сэвиджа рекомендует в усло-
i виях неопределённости выбирать решение, обеспечивающее минимальное значение максимального риска:
aij
),
i j i j
В ряде случаев представляется правдоподобным следующее рассуждение: так как неизвестны будущие состояния системы, то можно считать их равновероятными. Этот подход к решению используется в критерии «недостаточного основания» Лапласа. При решении задачи для каждого случая подсчитывается математическое ожидание благоприятного исхо-
да (вероятности состояний полагаются равными у ,■ = у , j = 1,n), и вы-
J / YI
бирается то правило, при котором величина этого исхода максимальна.
V 1 1 V
vL = max V~ aj =~ max V aj i n J n i J .
Критерий Байеса-Лапласа отступает от условий полной неопределённости - он предполагает, что возможным состояниям можно приписать определённую вероятность их наступления и, определив математическое ожидание благоприятного исхода для каждого решения, выбрать то, которое обеспечивает наибольшее значение благоприятного исхода:
vBL = max V aijyj
Этот метод использует возможность анализа предварительной информации о состояниях системы, при этом предполагается как повторяемость состояний, так и повторяемость решений, и, прежде всего, наличие достаточно достоверных данных о прошлых состояниях. То есть, основываясь на предыдущих наблюдениях, предоставляется возможным прогнозирование будущего состояние.
Следует отметить, что рассмотренные критерии экспертных стратегий не исчерпывают всего многообразия критериев выбора решения [21], но в рамках представляемой работы, это следует считать достаточным для проведения следующего вывода:
В силу своей природы, отмеченные стратегии только частично направлены на решения задач в условиях неопределённости [32]. Тем самым, проблема выбора решения при слабоструктурированном информационном потоке является достаточно неоднозначной, так как отсутствует возможность предварительного анализа вектора событий достаточного объёма. Выбор критерия (как и выбор принципа оптимальности) является наиболее трудной и ответственной задачей в теории принятия решений. Следует отметить, что конкретная ситуация никогда не бывает настолько
92
неопределённой [49], чтобы нельзя было бы получить частичной информации относительно вероятностного распределения состояний. В этом случае, оценив распределение вероятностей состояний, применяют альтернативный - байесовский подход, либо проводят эксперимент, позволяющий уточнить поведение исследуемой системы.
Учитывая тот фактор, что тепловые процессы характеризуются непрерывными и монотонными временными зависимостями и желаемый вид данных зависимостей для конкретного объекта регулирования по известному его упрощённому математическому описанию практически всегда известен, то можно предложить несколько иной метод формирования БЗ НЛР.
Полагая известными динамические показатели выходной координаты синтезируемой замкнутой СУ, при этом переходная характеристика этой координаты является монотонной непрерывной и сколь угодно раз дифференцируемой. Задачу синтеза НЛР для данного класса систем управления можно сформулировать следующим образом [15]:
Пусть желаемая, нечёткая замкнутая автоматизированная СУ описывается в виде
У = (X, У),
где X, У - лингвистические значения нечётких входных и выходных переменных; Гж - нечёткий оператор, заданный в виде набора управляющих правил
если Х есть А и У есть В, то У есть С
Объект регулирования для таких систем, принимая во внимание принцип последовательной коррекции, может быть представлен или в виде
У = ро (У ,и),
или в виде звена второго порядка
У = Го (У ,У ,и),
при этом Га - нечёткий оператор, записанный в виде управляющих правил, и - лингвистическое значение нечёткой переменной управления на входе объекта регулирования.
Цель синтеза по известным нечётким операторам Гж и ¥а найти нечёткий оператор регулятора ¥р, который обеспечит требуемое качество динамических характеристик автоматизированной СУ.
Лингвистический подход формирования оптимального оператора желаемой СУ можно сформулировать из утверждений: чем больше рассогласование между задающим воздействием Х и выходным значением У, тем больше должна быть величина изменения этого рассогласования или, что равнозначно, должна быть выше скорость изменения выходной переменной У, но с противоположным знаком. При этом не выдвигается никаких ограничений ни на количество терм-множеств лингвистических переменных ни на их вид и их распределение по всему диапазону изменения переменной.
Из вышеприведённого утверждения следует, что для реализации алгоритма синтеза НЛР необходимо иметь информацию как об ошибке желаемой СУ, так и о её производной. При известной динамической характеристике выходной координаты желаемой СУ и известном входном воздействии такую информацию получить несложно. Но данной информации для реализации алгоритма недостаточно. Поскольку переходную характеристику выходной координаты СУ, а, следовательно, и её ошибку (е = х - у) можно представить из участков разгона и торможения, плавно переходящих один в другой, для которых производная имеет различный знак, в конечном итоге выделение терм-множеств входной и выходной лингвистических переменных приводит к возникновению противоречия. Для исключения данного противоречия введём информацию о второй производной ошибки желаемой СУ, поскольку нулевое значение этой производной будет соответствовать смене знака производной ошибки, т.е. точке перехода
94
с участка разгона на участок торможения или наоборот, а максимумы этой производной - точкам перехода с участка разгона на участок торможения для производной ошибки.
Алгоритм синтеза НЛР будет сводиться к следующему [5, 54]:
Координатная плоскость, на которой изображены кривые е(і), е(і), е\і) и Х(і) в относительных единицах, разбивается на зоны в следующем порядке. Из точек пересечения кривой е"(і) с осью абсцисс восстанавливаем перпендикуляр до пересечения с кривой е(і) и из полученных точек проводим прямые, параллельные оси абсцисс к1, к2. Из точек, соответствующих максимумам кривой е"(і), восстанавливаем перпендикуляры до пересечения с кривой е(і) и из полученных точек проводим линии к3, к4, параллельные оси абсцисс (см. рис. 3.13).
Затем из точек пересечения прямых к1 - к4 с кривыми ошибки системы е(і) и её производной е(і) проводим прямые /1, /2, 13, ... параллельные оси ординат. Таким образом, на координатной плоскости прямыми к - /■ формируется сетка, на основании которой определяется нечёткий оператор Аж. Так например, для зоны, отмеченной на рис.2.33 (*,**) строка нечёткого оператора Еж будет выглядеть следующим образом (табл. 3.3).
Таблица 3.3
База знаний строки нечёткого оператора
е'
е
/р
/п
/п
8р
8р
8р
X
где /п - отрицательное большое; sn - отрицательное малое; sp - положительное малое; тр - положительное среднее; /р - положительное большое, или в виде строки правил:
Если е есть /п и е есть тр то X есть 8р (*);
95
Если е есть 8р и е есть 8П то Xесть 8р (**);
Такой подход позволяет автоматически производить выбор количества терм-множеств лингвистических переменных, а также определить диапазоны их изменения.
Рис. 3.13. Диаграмма формирования правил
нечёткого регулятора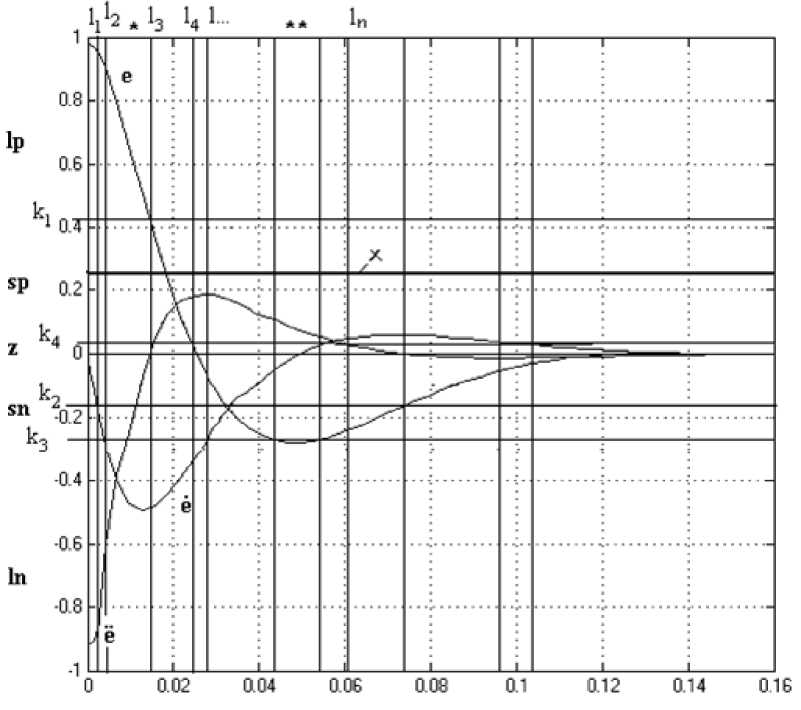
Аналогично может быть построен и нечёткий оператор объекта регулирования А0. Тогда формирование нечёткого оператора регулятора ¥р сведётся к следующему. Для произвольно выбранных значений X и У в
наборе ¥ж находим У , затем, используя полученное значение У и ранее принятое значение У, а также набор соотношений А0, находим значение и. Таким образом, получаем один параметр соотношения и = ¥р (X, У) = ^ (е). Повторяя вышеописанные действия с остальными значениями лингвисти-
ческих переменных X и У, определяем весь набор параметров нечёткого оператора ¥р.
Использование такого подхода к проектированию НЛР не исключает возможности получения БЗ, не удовлетворяющей условию о непротиворечивости наполняющих её правил. Как известно [84, 94], непротиворечивость системы управляющих правил обычно трактуется как отсутствие правил, имеющих сходные посылки и различные или взаимоисключающие следствия. При этом степень непротиворечивости 7-го и к-го правил можно оценит выражением:
С, = І ЦЮ“* (£і)л(£]))-Ц“ (е2) лт4(£2))!.
Е 1 1 Е2 2 2
Для проверки правильности предлагаемой методики синтеза НЛР на рис. 3.14 приведены результаты моделирования системы регулирования, настроенной на «модульный» оптимум, т.е. системы регулирования, переходная характеристика которой имеет слабо колебательный характер. При этом с целью понижения алгоритмической сложности НЛР количество терм - множеств лингвистической переменной ошибки было ограничено четырьмя, для наиболее значимых участков. С этой же целью количество правил базы знаний было снижено до 10. Кривые моделирования наглядно иллюстрируют совпадение переходной характеристики системы с НЛР с переходной характеристикой исходной системы даже при ограничениях на алгоритмическую сложность БЗ НЛР.
Рис. 3.14. Результаты моделирования СУ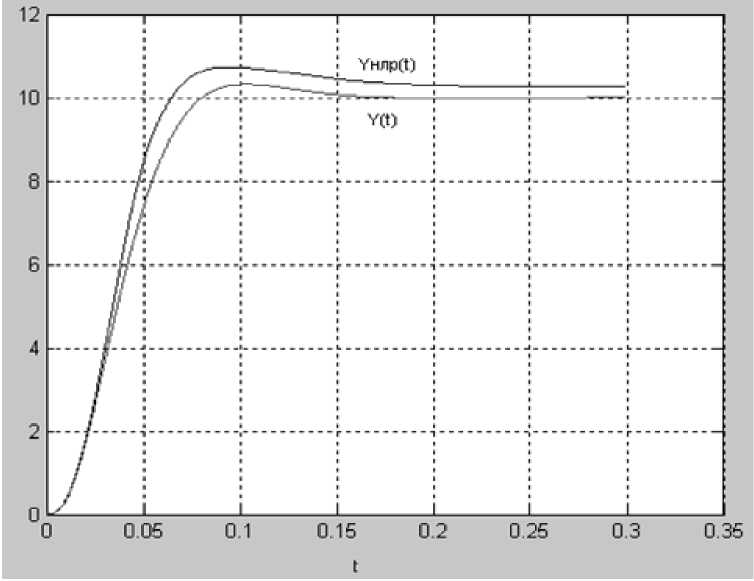
Таким образом, приведённый подход к построению БЗ НЛР, позволяет проводить её настойку, исключив фактор субъективности. Кроме того, необходимо отметить, что применение вышеизложенного метода снижает погрешности связанные с ранее описанными статистическими методами и легко поддаётся алгоритмизации. Полученная с применением метода БЗ НЛР всегда удовлетворяет требованию полноты, поскольку её формирование реализуется по прямым показателям качества.
С целью автоматизации процесса синтеза НЛР по прямым показателям качества, исключения графоаналитических приёмов построения и придания исследовательских функций при использовании данного метода разработан программный комплекс, работающий в среде Ма1;ЬаЬ [55].
Код программы представлен в виде двух т-файлов, реализующие соответственно две функции.
Первая функция реализует непосредственно алгоритм поиска критических зон. Аргументами (входными данными) для этой функции являются соответственно желаемые сигналы на входе и выходе регулятора изменяемые во времени. Выходные данные сформированы в виде структуры, которая содержит в себе найденные точки смены функций принадлежности по сигналу на входе регулятора, по его производной и по сигналу на выходе регулятора. Результаты отображаются в диалоговом графическом окне (см. рис. 3.15), в котором можно менять точность поиска точек перегиба.
Вторая функция реализует непосредственно построение базы НЛР: производит формирование функций принадлежности, причём сначала, по умолчанию, они берутся симметричные и треугольной формы; производится формирование базы правил; строятся на одном графическом поле желаемая переходная функция и её аналог, полученный с помощью НЛР; вычисляется среднеквадратичная ошибка; так же, если необходимо, можно отобразить трёхмерную поверхность отклика базы правил (на два входа и один выход). Графическое окно второй функции изображено на рис. 3.16. Таким образом, из рис. 3.16 видно, что реализована возможность коррекции как функций принадлежности (положение вершины отдельной функции, её вида), так и базы правил (смена условия в антенценденте, смена метода деф- фазификации).
Выходные данные второй функции формируются в виде структуры, которая представляет собой базу знаний НЛР. Эта структура сохраняется в рабочей области MatLab под именем “fis” и может быть тут же использована без дополнительных преобразований при моделировании в Simulink.
Смите э-НЛР
Р*е Бок Мет Jn.fr!> ТооЬ Мгяо« Нар
-0.5
Нгес15юп
от зеагсп:
зп!
тп огаме МР теп
С1|к
А
РЕ ЗУЛЫ АГЫ РАСЧЁТОВ А
Прямые
П.ЗрЙЛЛеЛ1^*)1е 0Н'1абЦНС
11-0.194025
11
0.673344 110.0623352
2
0.098574
21
-0333136 21
(14
30563
Э
0Б00306 310.095332 3 1696448
□|к-(о-С1о5в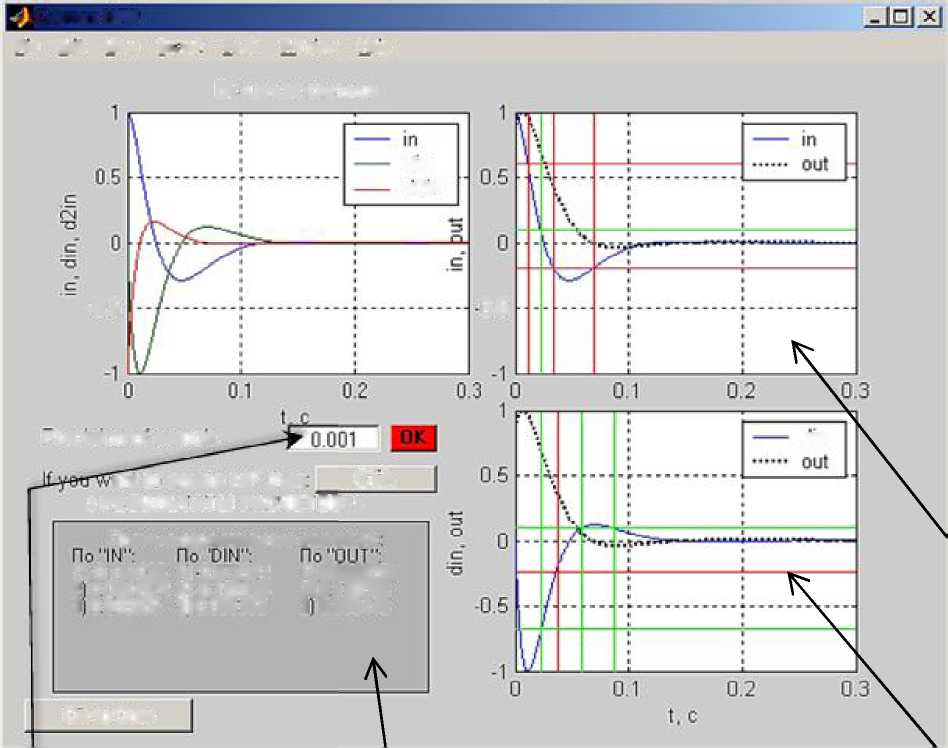
Точность поиска
Окно результатов
dln
а 2т
□.5
от
Формирование сетки для определё- ния ф-й принадлежности для сигналов вход-выход, производная от входного сигнала - выход соответственно.
Рис. 3.15. Графическое окно первой функции
Входной сигнал