

2.7. Особенности управления в электроэнергетических
системах разной структуры
2.7.1. Виды структур электроэнергетических систем
Несмотря на сложность современных ЭЭС применяется приближенная классификация их структур.
Прежде всего ЭЭС могут быть подразделены на объединения простой и сложной структуры. К ЭЭС простой структуры относятся такие, которые можно свести к эквивалентной двухмашинной системе.
Если же ЭЭС должна представляться тремя или более эквивалентными генераторами, то она относится к объединениям сложной структуры.
ЭЭС простой структуры подразделяются на следующие типы (рис. 2.11):
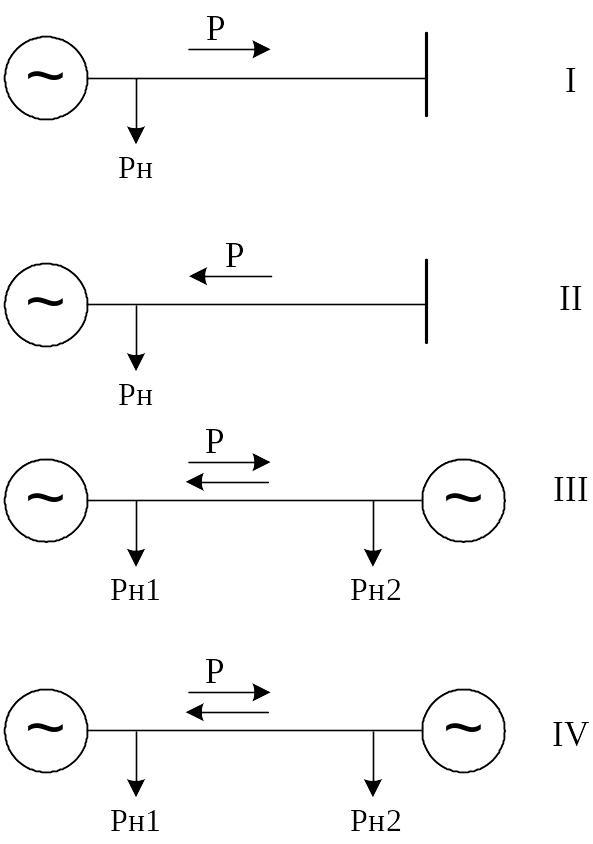
Рис. 2.11. ЭЭС простой структуры
– часть ЭЭС с избытком мощности, связанная со значительно более крупным энергообъединением;
– часть ЭЭС с дефицитом мощности, получающая мощность от другой, значительно более крупной её части;
– две соизмеримые по мощности части ЭЭС, связанные жёсткой связью (сильной связью):
Рпр > 0,15 Рмин,
где Рмин – суммарная мощность генераторов меньшей из связываемых систем.
– две соизмеримые по мощности части ЭЭС, соединённые слабой связью:
Рпр < 0,15 Рмин
ЭЭС сложной структуры можно классифицировать по следующим типам (рис. 2.12):
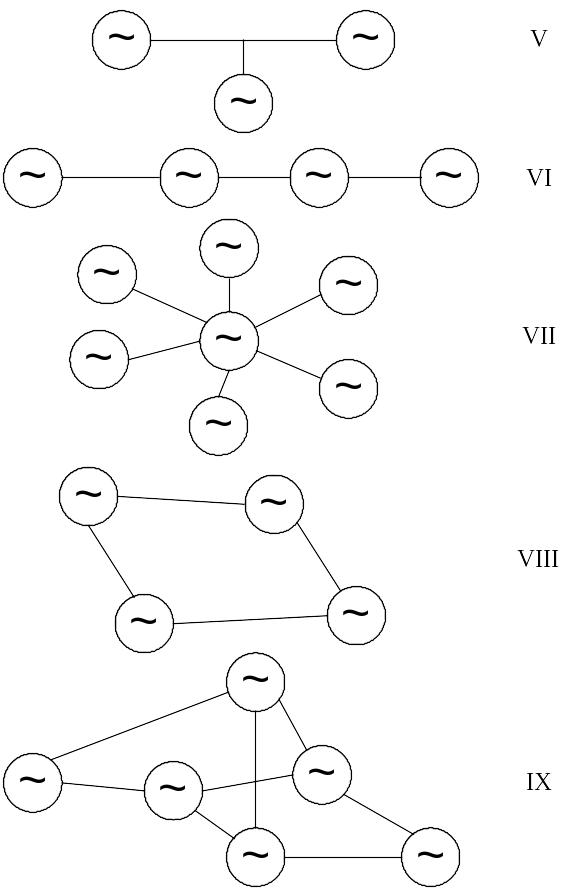
Рис. 2.12. ЭЭС сложной структуры
– лучевая трёхмашинная система;
– цепочечная многомашинная система;
– радиальная система;
– кольцевая система;
– многоконтурная система.
Во многих случаях достаточно сложные ЭЭС могут рассматриваться в первом приближении как простые или в них могут выделяться районы, которые целесообразно рассматривать как простые структуры.
2.7.2. Особенности управления в ээс структуры I.
ЭЭС структуры типа I могут быть сведены к эквивалентной схеме, состоящей из генератора, передающего мощность в систему (шины постоянного напряжения и постоянной частоты), и местной нагрузки (рис. 2.7.).
 Рис.
2.13. Схема двухмашинной ЭЭС
Рис.
2.13. Схема двухмашинной ЭЭС
Мощность генератора передающей ЭС определяется по формуле
![]() (2.1)
(2.1)
Предельная мощность по передаче составляет
![]() .
(2.2)
.
(2.2)
Для подобных ЭЭС
взаимный угол
![]() вырождается
в собственный угол передающей части
ЭЭС
вырождается
в собственный угол передающей части
ЭЭС
![]() .
Это связано с тем, что собственный угол
приемной мощной ЭЭС
.
Это связано с тем, что собственный угол
приемной мощной ЭЭС
![]() равен нулю, т.к. предполагается, что
частота в этой части равна номинальной
и не изменяется. На рис. 2.14 приведена
упрощенная векторная диаграмма ЭДС
и напряжений системы.
равен нулю, т.к. предполагается, что
частота в этой части равна номинальной
и не изменяется. На рис. 2.14 приведена
упрощенная векторная диаграмма ЭДС
и напряжений системы.
Взаимный угол можно определить :
![]() .
.
Для рассматриваемых ЭЭС возможны нарушения как СУ, так и ДУ. Чаще случаются нарушения СУ, например, вследствие отключения части линий связи.
Нарушения ДУ случаются реже, что обусловлено малой вероятностью тяжелых КЗ и оснащением ЭЭС быстродействующими релейными защитами.

Рис. 2.14. Упрощенная векторная диаграмма
Рассмотрим характер протекания процессов при КЗ вблизи шин передающей части на одной из цепей линии (двухфазное КЗ на землю, при котором сброс мощности по передаче составляет 75 – 80 %).
На рис. 2.15 показаны
характеристики мощности генератора
для нормального I
, аварийного II
и послеаварийного III
режимов (рис 2.15,а) и характер изменения
угла
![]() при 2 –
фазном КЗ на землю на одной из цепей
линии. На рис.2.15,б показано поведение
угла
для двух возможных путей развития
ситуации при рассматриваемом нарушении:
1) ДУ не нарушается, угол после
первоначального увеличения начинает
колебаться с затухающей амплитудой –
это так называемые синхронные качания;
2) ДУ нарушается, угол неограниченно
увеличивается, т.е. признак неустойчивости
– неограниченное
увеличение взаимного угла.
при 2 –
фазном КЗ на землю на одной из цепей
линии. На рис.2.15,б показано поведение
угла
для двух возможных путей развития
ситуации при рассматриваемом нарушении:
1) ДУ не нарушается, угол после
первоначального увеличения начинает
колебаться с затухающей амплитудой –
это так называемые синхронные качания;
2) ДУ нарушается, угол неограниченно
увеличивается, т.е. признак неустойчивости
– неограниченное
увеличение взаимного угла.
Как видно из рис.
2.15,а, в ЭЭС типа
I
при КЗ возникает избыток активной
мощности в передающей части
![]() ,что
приводит к ускорению генераторов
(скорость ротора увеличивается, скольжение
положительное и увеличивается, угол
растет). В этом заключается главная
особенность ЭЭС
структуры
типа I.
,что
приводит к ускорению генераторов
(скорость ротора увеличивается, скольжение
положительное и увеличивается, угол
растет). В этом заключается главная
особенность ЭЭС
структуры
типа I.
Напомним основы
способа площадей для анализа ДУ. На
рис.2.15,а площадка а123
![]() есть площадка ускорения. Она пропорциональна
энергии ускорения ротора генератора
(энергия, израсходованная на ускорение
за счет действия избыточного момента).
Площадка 345
есть площадка ускорения. Она пропорциональна
энергии ускорения ротора генератора
(энергия, израсходованная на ускорение
за счет действия избыточного момента).
Площадка 345
![]() есть
возможная площадка торможения. Она
пропорциональна энергии торможения
ротора.
есть
возможная площадка торможения. Она
пропорциональна энергии торможения
ротора.
Условие обеспечения ДУ имеет вид
![]() .
.
Анализ факторов, от которых зависят величины этих площадок, позволяет выявить все возможности управления для обеспечения и повышения ДУ (управления ДУ).
Очевидно, чтобы
повысить ДУ, надо, с одной стороны,
уменьшить
![]() во время КЗ и, с другой стороны, увеличить
после
отключения КЗ. Из этого условия вытекают
все средства повышения ДУ. Следует
напомнить, что первым и основным средством
повышения ДУ является быстрое отключение
КЗ средствами РЗ. При этом в первую
очередь уменьшается
,
а также увеличивается
.
во время КЗ и, с другой стороны, увеличить
после
отключения КЗ. Из этого условия вытекают
все средства повышения ДУ. Следует
напомнить, что первым и основным средством
повышения ДУ является быстрое отключение
КЗ средствами РЗ. При этом в первую
очередь уменьшается
,
а также увеличивается
.
 Рис. 2.15.
Характеристики мощности и изменение
угла δ
Рис. 2.15.
Характеристики мощности и изменение
угла δ
в ЭЭС структуры типа – I: а – характеристика
мощности; б – график изменения угла δ
От системы ПАА
требуется : а) повысить характеристику
мощности II;
б) снизить характеристику
![]() ;
в) повысить характеристику мощности
III.
;
в) повысить характеристику мощности
III.
Указанные требования можно реализовать, в частности, следующими средствами:
– регулированием
возбуждения: увеличивается Р
генераторов, тем самым уменьшается
![]() и
увеличивается
и
увеличивается
![]() в ПАР;
в ПАР;
– ФК, которая уменьшает сопротивление передачи, следовательно, повышает характеристику III, а значит, увеличивает .
– ОГ, непосредственно
уменьшающим избыток мощности с уменьшением
![]() ;
;
– РТ, непосредственно уменьшающая избыток мощности с уменьшением ;
– ЭТ, увеличивающее Р генератора, а следовательно, уменьшающее избыток мощности (« с другой стороны »).
Для полноты картины приведем возможную ситуацию, отраженную на рис. 2.16.
Как следует из рис. 2.16, условия СУ ПАР не выполняются, т.е. не только ДУ нарушается, но и СУ не обеспечивается. В этом случае необходимо не только осуществлять уменьшение небаланса активной мощности и гашение избыточной кинетической энергии, но и обеспечивать СУ ПАР, т.е. разгрузку электропередачи в ПАР.
Таким образом, с учетом изложенного к ПАА в ЭЭС структуры типа I предъявляются следующие требования. При управлении ДУ предотвратить нарушение синхронизма путем: 1) снижения избытка активной мощности на валу генератора избыточной части системы за счет воздействия на возбуждение генераторов, отключения части генераторов, аварийного снижения мощности паровых турбин; 2) торможения ускорившихся генераторов за счет регулирования возбуждения, электрического торможения генераторов.
При управлении СУ необходимо обеспечить требуемый коэффициент запаса СУ путем: 1) разгрузки электропередачи за счет ОГ, РТ; 2) повышения пропускной способности электропередачи за счет ФК, ОШР, включения отключенных элементов связи.
Если обеспечить синхронную устойчивость не удается, должна работать АЛАР. При этом в АЛАР необходимо предусматривать оба способа воздействия на АР: а) ресинхронизацию; б) разделение ЭЭС на две несинхронно работающие части, имея в виду последующую синхронизацию. При ресинхронизации предусматривается выравнивание скоростей асинхронно идущих частей.
Для данной конкретной структуры ЭЭС прежде всего необходимо ликвидировать ускорение в избыточной части. Проблема ликвидации торможения в дефицитной части, как правило, не возникает, т.к. мощность ее существенно больше избыточной части, и потеря указанной генерации мало сказывается на скорости вращения генераторов приемной части.
 Рис. 2.16. Характеристики мощности
при неосуществимом ПАР
Рис. 2.16. Характеристики мощности
при неосуществимом ПАР
При реализации
ДС необходимо предотвратить опасное
повышение частоты в отделившейся
избыточной части путем дополнительного
снижения генерируемой мощности, а при
необходимости отделить ТЭС (и АЭС) со
сбалансированной нагрузкой, так как
именно для ТЭС и АЭС опасно повышение
частоты в связи с возможностью нарушения
управления технологическими процессами
(следует иметь в виду, что при частоте
более 1,1![]() появляется опасность разрушения
турбоагрегата).
появляется опасность разрушения
турбоагрегата).