

1.2. Материальная точка
С помощью простых наблюдений нетрудно убедиться, что движение тел зависит от их размеров и формы. Чем сложнее форма тела, тем, как правило, сложнее его движение. Однако в некоторых случаях форма и размеры тела не оказывают сколько-нибудь существенного влияния на характер механического движения. В этих случаях движущееся тело можно считать материальной точкой. Материальная точка – это простейшая модель реального тела.
![]()
|
Модель материальной точки можно также использовать при описании поступательного движения, так как в этом случае все точки тела движутся одинаково. Так, при стыковке космического корабля с орбитальной станцией, когда корабль уже сориентирован и все точки его движутся одинаково, его можно рассматривать как материальную точку, хотя его размеры не малы по сравнению с расстоянием до станции и ее габаритами.
Механика одной материальной точки в классической механике является основой для изучения механики вообще. С классической точки зрения любое макроскопическое тело или систему тел можно мысленно разбить на малые макроскопические части, взаимодействующие между собой. Каждую из этих частей можно принять за материальную точку. Тем самым изучение движения произвольной системы тел сводится к изучению движения системы взаимодействующих материальных точек. Поэтому естественно начать изучение классической механики с механики одной материальной точки, а затем перейти к изучению системы материальных точек.
1.3. Описание движения
|
|
|
|
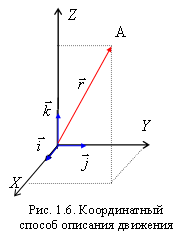
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() –
координатные орты, то есть векторы,
направленные вдоль координатных осей
и по модулю равные единице,
–
координатные орты, то есть векторы,
направленные вдоль координатных осей
и по модулю равные единице,
![]() –
проекции радиус-вектора на оси системы
координат.
–
проекции радиус-вектора на оси системы
координат.
Траектория. Конец радиус-вектора с течением времени перемещается вместе с частицей. Вычерчиваемая им при этом воображаемая линия называется траекторией движения частицы. Она может быть видимой или невидимой. Например, траектория движения автомобиля по автостраде не видна, а след, оставляемый реактивным самолетом в голубом небе (рис. 1.7), зигзаг молнии на фоне тучи (рис. 1.8) являются видимыми траекториями движения.
По виду траектории движения разделяют на прямолинейные и криволинейные. Например, траектория движения пули от пистолета до мишени – отрезок прямой линии; траектория самолета, выполняющего «мертвую петлю» – окружность.
Траектории небесных тел называются орбитами. Орбиты планет Солнечной системы и некоторых комет являются эллипсами. Существуют кометы, орбиты движения которых являются параболами.
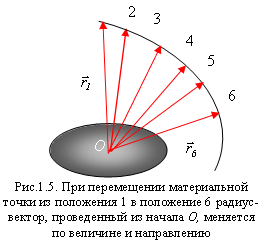
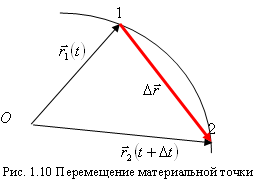
Перемещение. Путь. Пусть за промежуток
времени
![]() точка
А переместилась из положения 1 в положение
2. Обозначим радиус-вектор начального
положения точки А через
точка
А переместилась из положения 1 в положение
2. Обозначим радиус-вектор начального
положения точки А через
![]() ,
а радиус-вектор конечного положения –
через
,
а радиус-вектор конечного положения –
через
![]() .
.
Вектор
![]() ,
проведенный из начального положения
частицы в конечное, называется вектором
перемещения (рис. 1.10).
,
проведенный из начального положения
частицы в конечное, называется вектором
перемещения (рис. 1.10).
![]() .
.
|
![]() .
.
Здесь
![]() являются
проекциями вектора перемещения на оси
декартовой системы координат.
являются
проекциями вектора перемещения на оси
декартовой системы координат.
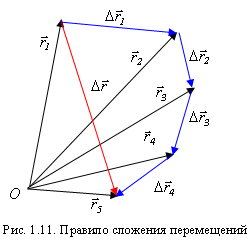
Если частица последовательно совершает
несколько перемещений
![]() ,
то полное перемещение равно векторной
сумме отдельных перемещений
,
то полное перемещение равно векторной
сумме отдельных перемещений
![]() (рис.
1.11).
(рис.
1.11).
Длина участка траектории между начальным и конечным положениями материальной точки называется путем или расстоянием, пройденным точкой.
Средняя скорость. Быстроту, с которой
совершается перемещение, можно
охарактеризовать средней скоростью.
Если за промежуток времени
совершается
перемещение
,
то отношение
![]() называется
средней скоростью частицы за время
:
называется
средней скоростью частицы за время
:
![]() .
.
Вектор средней скорости совпадает по направлению с вектором перемещения.
Средняя скорость относится к определенному промежутку времени, поэтому для одного и того же движения она может быть различной для различных промежутков времени. Если при своем движении частица возвращается в исходное положение, то ее перемещение, а следовательно, и средняя скорость, равны нулю, тогда как на любом участке траектории это не так. Обращение в нуль средней скорости при движении по замкнутой траектории связано с ее векторным характером.
Иногда необходимо знать путь, проходимый
за какое-то определенное время. В этом
случае наряду со средней скоростью по
перемещению целесообразно ввести
среднюю скорость прохождения пути. Если
за промежуток времени
частица
проходит путь
![]() ,
то средняя скорость прохождения пути
равна
,
то средняя скорость прохождения пути
равна
![]() .
.
Средняя скорость прохождения пути – величина скалярная. Когда говорят о скорости движения поездов, судов, пешеходов, то обычно имеют в виду именно эту скорость.
Заметим, что в общем случае
![]() .
Равенство имеет место только при
прямолинейном движении в одном
направлении. Зная среднюю скорость
прохождения пути, можно приближенно
вычислить путь, пройденный за определенное
время или время прохождения определенного
пути.
.
Равенство имеет место только при
прямолинейном движении в одном
направлении. Зная среднюю скорость
прохождения пути, можно приближенно
вычислить путь, пройденный за определенное
время или время прохождения определенного
пути.
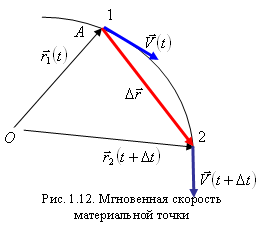
Мгновенная скорость. До сих пор мы характеризовали движение только средней скоростью, которая равна отношению перемещения ко времени. Чтобы исследовать закономерности движения и управлять движением какого-либо тела, необходимо знать скорость его движения в каждой точке траектории, или, что то же самое, в каждый момент времени. Такая скорость называется мгновенной. Особенно важно уметь определять мгновенную скорость движения тела, когда скорость движения меняется как по модулю, так и по направлению.
Для определения мгновенной скорости движения тела в некоторой точке нужно измерить перемещение за такой малый промежуток времени , за который можно считать скорость практически неизменной. Поэтому можно дать такое определение мгновенной скорости: мгновенная скорость равна отношению очень малого перемещения к промежутку времени, за которое оно совершилось:
![]() .
.
Обозначение lim следует читать как
предел. (Слово «предел» образовано от
латинских слов "limes" и "limitis"
– граница, предел.) В математике величину
такого предела называют производной
функции
![]() по
времени. Для нее в математике используется
обозначение
по
времени. Для нее в математике используется
обозначение
![]() .
.
Здесь под
![]() понимается
бесконечно малое перемещение, которое
частица совершает за бесконечно малый
промежуток времени
понимается
бесконечно малое перемещение, которое
частица совершает за бесконечно малый
промежуток времени
![]() .
.
|
Так как изменения координат являются проекциями вектора перемещения на соответствующие оси координат, то скорости изменения координат определятся следующим образом:
![]() ,
,
![]() ,
,
![]() ,
,
или
![]() ,
,
![]() ,
,
![]() .
.
Таким образом, проекции вектора скорости на оси декартовой системы координат являются производными соответствующих координат по времени.
Вектор мгновенной скорости можно, как
любой вектор, записать через его проекции
на оси
![]() :
:
![]() ,
,
или
![]() .
.
Модуль вектора скорости определяется через его проекции по общему для всех векторов правилу:
![]() .
.
Ускорение. При движении тел их
скорости могут меняться как по величине,
так и по направлению. Величину,
характеризующую быстроту изменения
скорости, называют ускорением. Ускорение
равно пределу отношения изменения
скорости
![]() к
промежутку времени
,
в течение которого это изменение
произошло:
к
промежутку времени
,
в течение которого это изменение
произошло:
![]() ,
,
следовательно, ускорение – это производная скорости по времени:
![]() .
.
Ускорение – важнейшая физическая величина, потому что, как будет видно в дальнейшем, действия одних тел на другие определяют не скорости тел, а ускорения.
В отличие от вектора скорости, который всегда направлен по касательной к траектории, вектор ускорения может иметь составляющие, направленные как по касательной, так и по нормали к траектории.
Нормальное ускорение. Рассмотрим частный случай движения точки по криволинейной траектории – движение точки по окружности радиуса R с постоянной по модулю скоростью. В этом случае скорость постоянна по величине, но изменяется по направлению. Ускорение, которое характеризует изменение скорости по направлению, называют нормальным ускорением.
|
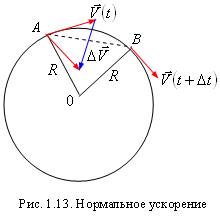
Пусть частица перемещается из точки А
в точку В за время Dt (рис. 1.13).
Радиусы ОА и ОВ перпендикулярны
векторам скорости
![]() и
и
![]() .
Перенесем вектор
параллельно
самому себе в точку А. Тогда вектор
приращения скорости
будет
замыкать треугольник, образованный
этими скоростями. Из подобия равнобедренного
треугольника, построенного на векторах
скорости
и
,
и треугольника АОВ следует:
.
Перенесем вектор
параллельно
самому себе в точку А. Тогда вектор
приращения скорости
будет
замыкать треугольник, образованный
этими скоростями. Из подобия равнобедренного
треугольника, построенного на векторах
скорости
и
,
и треугольника АОВ следует:
![]() .
.
При
![]() длина
хорды АВ будет стремиться к длине
дуги
длина
хорды АВ будет стремиться к длине
дуги
![]() ,
поэтому модуль нормального ускорения
определится следующим соотношением:
,
поэтому модуль нормального ускорения
определится следующим соотношением:
![]() .
.
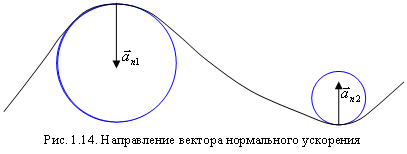
При
![]() вектор
поворачивается
и в пределе будет направлен по радиусу
к центру окружности, а, следовательно,
и вектор нормального ускорения будет
также направлен по радиусу к центру
окружности.
вектор
поворачивается
и в пределе будет направлен по радиусу
к центру окружности, а, следовательно,
и вектор нормального ускорения будет
также направлен по радиусу к центру
окружности.
|
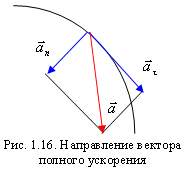
Тангенциальное ускорение. В общем
случае неравномерного движения скорость
может изменяться и по величине, и по
направлению, поэтому изменение вектора
скорости
за
время Dt можно представить как сумму
![]() (рис. 1.15).
Поделив это выражение на Dt и перейдя
к пределу, получим:
(рис. 1.15).
Поделив это выражение на Dt и перейдя
к пределу, получим:
|
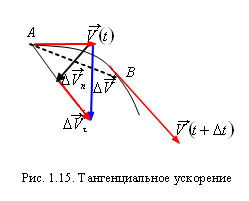
где
![]() –
нормальное ускорение,
–
нормальное ускорение,
![]() –
тангенциальное ускорение. Таким образом,
тангенциальное ускорение характеризует
изменение скорости по величине. При
–
тангенциальное ускорение. Таким образом,
тангенциальное ускорение характеризует
изменение скорости по величине. При
![]() точка
В будет приближаться к точке А, а вектор
точка
В будет приближаться к точке А, а вектор
![]() стремится
занять положение касательной к траектории.
Следовательно, тангенциальное ускорение
направлено по касательной к траектории,
а его модуль
стремится
занять положение касательной к траектории.
Следовательно, тангенциальное ускорение
направлено по касательной к траектории,
а его модуль
![]() .
.
|
Таким образом, основными физическими величинами в кинематике материальной точки являются пройденный путь, перемещение, скорость и ускорение. Путь является скалярной величиной. Перемещение, скорость и ускорение – величины векторные. Чтобы задать векторную величину, нужно задать ее модуль и указать направление. Векторные величины подчиняются определенным математическим правилам. Вектора можно проектировать на координатные оси, их можно складывать, вычитать и т.д.