

1.2 Способы управления технологическими объектами
Любое управление строится на основе информации о состоянии объекта управления и сопоставления информации с целью управления и формирования по результатам этого сопоставления соответствующего управляющего воздействия. Все эти задачи решаются управляющим устройством, в качестве которого в системах управления все чаще используются средства вычислительной техники (СВТ). К ним относятся микропроцессоры, микроконтроллеры и персональные компьютеры.
Использование средств вычислительной техники в управлении технологическими процессами дает возможность:
компенсировать программным путем недостатки датчиков (нелинейность характеристики, наличие зоны нечувствительности и сдвига нуля);
вычислять значение выходных управляющих параметров технологического процесса по математической модели при отсутствии необходимых датчиков;
рассчитывать в автоматическом режиме оптимальную структуру и параметры отладки цифровых регуляторов при изменении динамических параметров объекта управления;
реализовывать совершенные алгоритмы управления, которые могут перестраиваться программным путем при изменении динамики объекта, технологии производства, ситуации в ходе технологического процесса;
учитывать при управлении не только текущее состояние объекта, но и его предысторию.
Управление технологическими объектами с использованием СВТ можно осуществлять тремя способами:
управление в режиме советника;
супервизорное управление;
непосредственное цифровое управление.
На рис. 1.6 приведена схема системы управления с использованием СВТ в режиме советника.
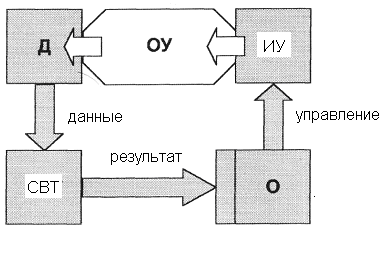
Рисунок 1.6 – Режим советника
Информация о состоянии объекта управления снимается с датчиков, обрабатывается и в удобной форме предоставляется оператору (О). Характерная особенность такого режима - формирование влияния на объект управления оператором через исполнительные органы системы.
В режиме супервизорного управления выполняется автоматическая коррекция установок локальных регуляторов с помощью постоянного подключения выводов управляющего устройства через устройство связи с объектом до установок локальных аналоговых регуляторов. В этом случае СВТ работают в замкнутом контуре второго уровня управления и используются для решения задач статической оптимизации технологических объектов управления.
При непосредственном цифровом управлении предполагается выполнение следующих операций:
определение в СВТ ошибки несогласования между задающим воздействием и полученным значением;
опрос датчиков в дискретные моменты времени, превращение информации в цифровой код и введение в запоминающее устройство средств вычислительной техники;
формирование управляющего воздействия с помощью алгоритма управления;
преобразование цифрового сигнала в аналоговый управляющий и выдача его на исполнительный механизм (орган).
Схема системы управления в режиме непосредственного цифрового управления (НЦУ) представлена на рис. 1.7.

Рисунок 1.7 – Режим НЦУ
Информационная связь между системой управления и ОУ осуществляется с помощью датчиков и исполнительных органов. Отличительной особенностью работы СВТ в режиме непосредственного цифрового управления является наличие предельно допустимой задержки между моментами введения информации, обработки и выдачи управляющего воздействия.
При реализации контуров НЦУ применяются синхронный и асинхронный принципы связи управляющих СВТ с объектом. При синхронном обмене процесс управления разбивается тактовыми импульсами на такты, за это время осуществляются снятие данных с ОУ, их обработка и выдача управляющего воздействия. При асинхронном обмене в СВТ поступают импульсы от датчиков прерывания, при этом на некоторое время прерывается выполнение основной программы, запоминается промежуточная информация и выполняется подпрограмма по сигналу прерывания. После этого осуществляется возвращение к прерванной программе.
Таким образом, необходимо решать такие задачи:
Анализ ОУ и разработка математической модели.
Определение структуры системы управления.
Проектирование алгоритма управления.
Выбор оптимального периода опроса датчиков и выдачи управляющего воздействия.
Выбор типа СВТ и разработка системы для реализации заданных алгоритмов, включая выполнение требований к устройствам связи с объектом.
Реализация программного обеспечения.
Структура типичного контура НЦУ, который реализуется на базе СВТ, представлена на рис. 1.8. СВТ выполняют функции задающего, сравнивающего и управляющего устройств.
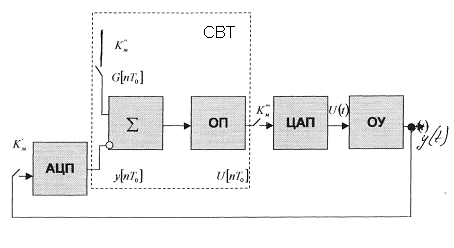 Рисунок 1.8 –
Структурная схема контура НЦУ
Рисунок 1.8 –
Структурная схема контура НЦУ
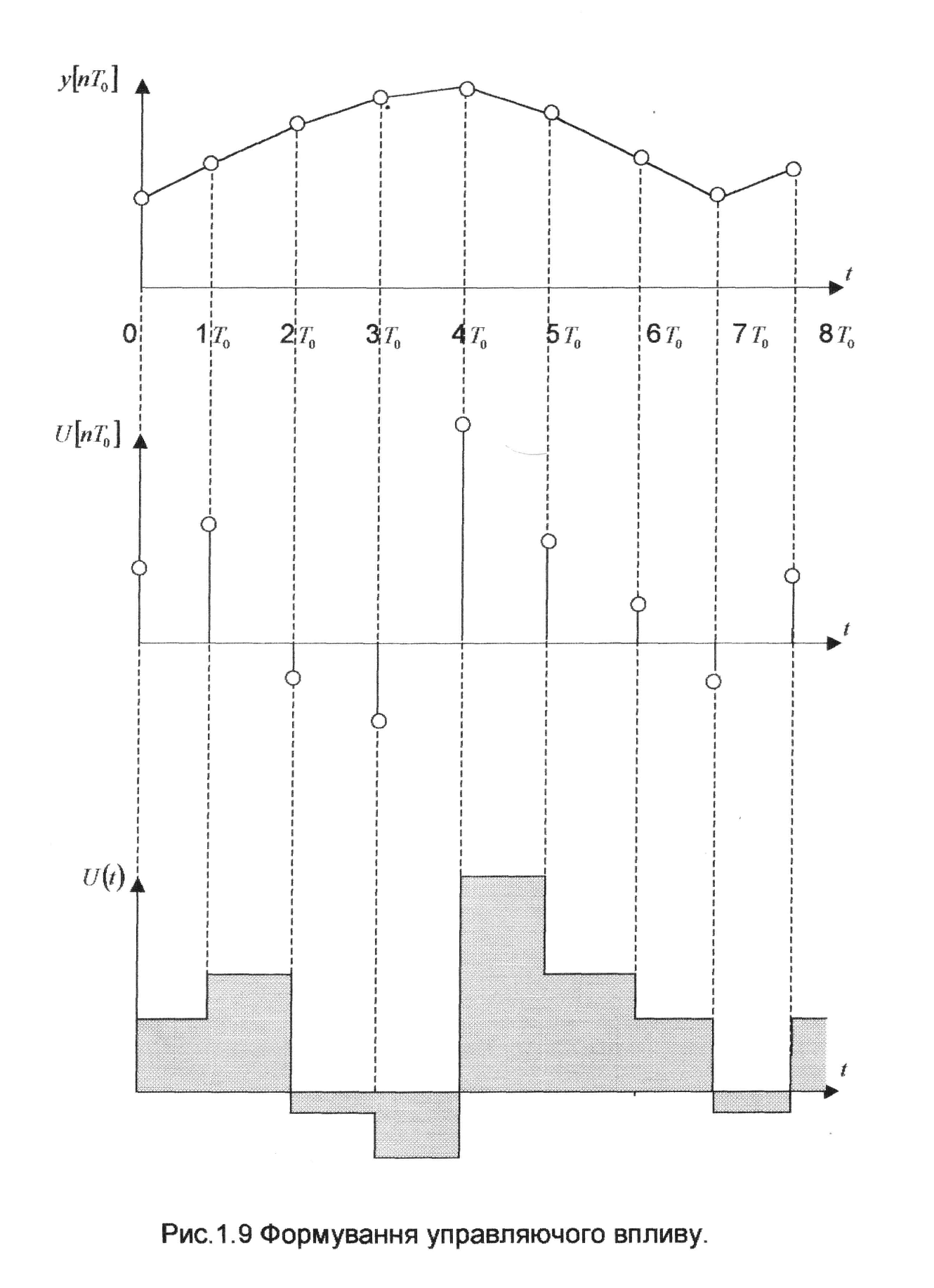
Рисунок 1.9 –
Формирование управляющего воздей-
ствия
Исходная регулируемая
величина y(t)
в дискретные моменты времени
![]() поступает
через коммутатор
поступает
через коммутатор
![]() на аналого-цифровой преобразователь.
С помощью коммутатора аналоговых
сигналов осуществляется квантование
непрерывного сигнала с периодом
квантования Т0,
в результате чего координата y(t)
превращается в решетчатую
функцию y[nТ0].
На каждом периоде квантования в
сравнивающем устройстве определяется
ошибка регулирования:
на аналого-цифровой преобразователь.
С помощью коммутатора аналоговых
сигналов осуществляется квантование
непрерывного сигнала с периодом
квантования Т0,
в результате чего координата y(t)
превращается в решетчатую
функцию y[nТ0].
На каждом периоде квантования в
сравнивающем устройстве определяется
ошибка регулирования:
e [n0]=G[n0]-y[n0], (1.1)
где G[n0] - влияние, которое задается цифровым регулятором.
Вычислительное устройство (ВУ) на основании алгоритма НЦУ формирует управляющее воздействие u[n0] в виде цифрового кода, который через коммутатор в каждый период квантования подключается ко входу цифро-аналогового преобразователя. С помощью ЦАП осуществляется преобразование последовательности значений u[n0] в непрерывный сигнал u(t), который остается постоянным на протяжении следующего периода квантования nT0 до появления следующего члена последовательности u[(n+1)T0] ( рис. 1.9).
СВТ в мультипрограммном режиме обслуживают поочередно каждый контур НЦУ, определяют управляющее воздействие Ui(n0), где i = 1,2,…, Р - номер цифрового регулятора. С помощью регистров цифро-аналоговых преобразователей выполняется запоминание управляющего воздействия в каждом контуре НЦУ за весь период квантования T0i. Вычислительное устройство, с помощью которого реализуется цифровой регулятор, работает в реальном масштабе времени. Коммутатор выполняет функции импульсного модулятора, прохождение сигнала через который связано с потерей части информации, которая находится в нем, так как в промежутках между импульсами U(n0) характер изменения управляющего воздействия U остается неизвестным.
Задача оптимального выбора периода квантования относится к одной из основных проблем оптимального расходования машинного времени, затраченного на каждый контур НЦУ. При уменьшении Т0 увеличиваются точность регулирования и загрузка СВТ, но неэкономно тратится машинное время. При большом Т0 ухудшается качество регулирования системы, поэтому возникает проблема поиска компромиссного решения, которое удовлетворяет необходимым требованиям.
Таким образом, выбор Т0 сводится к нахождению зависимости точности управления от величины периода квантования управляющего воздействия u[n0] и управляющей переменной y[n0].