

5.4.2 Умови роботи та головні завдання розрахунків верстатів-качалок
Верстат-качалка працює при циклічних змінних навантаженнях на головку балансира. Робота приводу верстата-качалки нерівномірна в межах одного циклу, тобто ходу штанг вверх і вниз. Якщо верстат-качалка не зрівноважений, то при ході вверх його двигун піднімає колону штанг і переборює тиск рідини на плунжер насоса. В цій частині циклу він повністю завантажений. При ході вниз штанги опускаються під дією власної ваги. Нагнітальний клапан в плунжері відкритий і тиск рідини на штанги не діє. В цей період штанги розкручують двигун.
Таким чином, головне завдання – зрівноваження верстата-качалки є розрахунок параметрів зрівноваження, тобто зусиль або сил ваги вантажів і місця їх розміщення.
Але навантаження при зрівноваженні привода верстата-качалки хоча і стає позитивним при ході штанг вниз, але змінне в межах одного ходу штанг вверх і вниз. Тому необхідно визначити найбільш раціональну потужність приводу. Основним параметром, який визначає потужність приводу, є тангенціальна сила на пальці кривошипа верстата-качалки (рис. 5.18 ,а). Вона і радіус обертання пальця кривошипа визначають обертовий момент, а разом з кутовою швидкість обертання – і потужність двигуна. Звідси випливає, що другим завданням є визначення тангенціальної сили на пальці кривошипа.
Вирішення цих завдань дозволить перейти до визначення потужності приводу верстата-качалки, а після цього, діючих на окремі вузли, та до міцністних розрахунків вузлів і деталей.
Зрівноваженням верстатів-качалок досягають рівномірного навантаження на двигун. Методи зрівноваження балансирних верстатів-качалок поділяються на механічні (з допомогою противаг) та пневматичні (з допомогою тиску газу чи повітря).
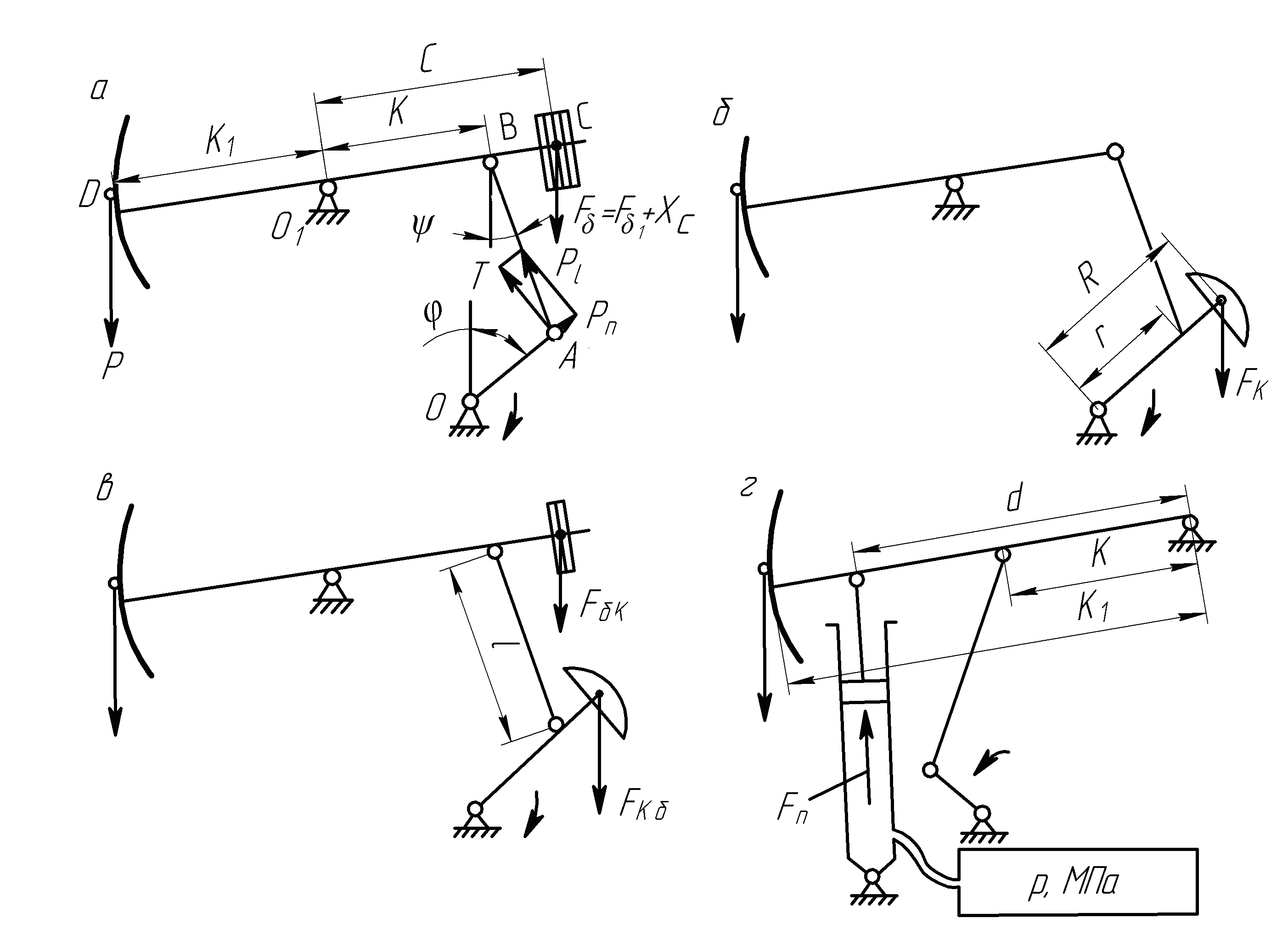
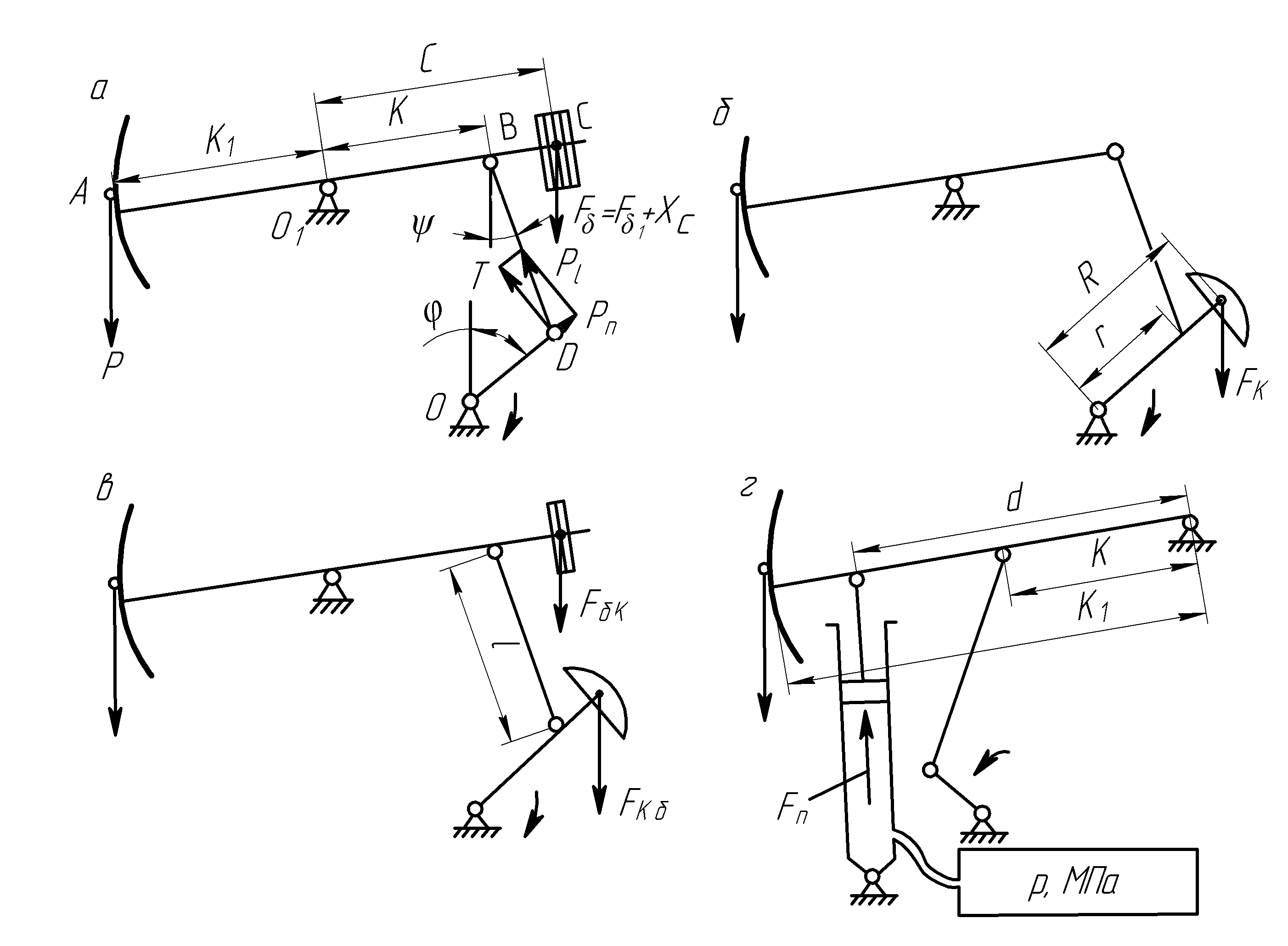
Рисунок 5.18 – Схеми верстатів-качалок з різними методами зрівноваження
5.4.3 Методи зрівноваження верстатів-качалок
При першому методі зрівноваження вантажі можуть бути розміщені на балансирі, на кривошипі або на обох цих деталях. Відповідно і метод зрівноваження називається балансирним, кривошипним або комбінованим (див. рис. 5.18, а; б; і в). Балансирне зрівноваження застосовують у верстатах-качалках малої вантажопідйомності (10 - 20 кН). При збільшенні вантажопідйом-ності вантаж на балансирі робиться дуже великим і при зворотно-поступальному русі виникають значні інерційні сили. Ці сили негативно впливають на працездатність вузлів і з’єднань верстата-качалки. При кривошипному зрівноваженні вантаж, який розміщений на кривошипі, здійснює рівномірне обертання. При цьому виникає лише інерційна сила, яка направлена по радіусу обертання. Вона сприймається підшипниками кривошипного вала і не впливає на працездатність інших вузлів верстата-качалки. Тому в потужних верстатах-качалках (50 - 200 кН) застосовують тільки кривошипне зрівноваження. В умовах середньої потужності (30 - 40 кН) застосовують перехідне, комбіноване зрівноваження.
Крім зрівноважування вантажами може використовуватися пневматичне зрівноваження (див. рис. 5.18, г), при якому тиск стиснутого газу або повітря діє на поршень, який з’єднаний зі штоком та переднім плечем балансира. Таким чином, сила тиску компенсує вплив частини маси вантажу, який діє в точці підвісу штанг. Цей метод не потребує великих додаткових вантажів, а відповідно, не виникає значних інерційних сил, шкідливих для вузлів верстата-качалки.
Зрівноважувальні вантажі або сили розраховують принципово різними методами, в основу яких покладено:
- рівність роботи привода при ході вверх і вниз;
- зведення до мінімуму суми квадратів відхилень тангенціальної сили на пальці кривошипа від його середнього значення.
Перший спосіб найбільш простий, але менш точний. Він базується на елементарній теорії роботи установки штангового насоса.
Другий метод складніший, але більш точний. Він базується на умовах роботи установок наближених до реальних. В той же час аналіз першого і другого методів показав, що в умовах роботи сучасних верстатів-качалок різниця в результатах розрахунків за першим і другим методом є невеликою.
Далі наведено перший метод розрахунку, а по другому дано лише вихідні дані та результуючі залежності. В якості прикладу описаний метод балансирного зрівноваження.
Вираз для роботи, яка виконується верстатом-качалкою при ході вверх і вниз на основі елементарної теорії має вигляд:
AXB = PXBSD - Fб1SC ,
AXH = PXHSD + Fб1SC ,
де PXB = PШЖ+ΔPЖ; PXН = PШЖ;
Fб1 – сила тяжіння зрівноважувального вантажу;
SC – переміщення вантажу.
Силами тертя нехтують. Інерційні сили в першій і другій половині ходу вверх мають різні знаки, тому суму їх робіт можна прирівняти до нуля (аналогічно при ході вниз).
Порівнюючи роботи при ході вверх і вниз, знаходимо:
![]() ; (5.43)
; (5.43)
![]() . (5.44)
. (5.44)
Значення k1 і c – вказані на рисунку 5.18.
Таким чином маса противаги повинна бути рівна сумі мас колони штанг і половини сили від тиску рідини на плунжер. Причому при ході штанг вверх двигун буде долати половину сили від тиску рідини на плунжер, а при ході штанг вниз – маса частини противаги, що відповідає за величиною половині тієї ж сили.
Оскільки верстат-качалка може бути незрівноваженою системою, варто визначити масу вантажу його зрівноваження. Цю величину можна знайти із суми моментів мас окремих частин верстата-качалки відносно опори балансира:
![]() , (5.45)
, (5.45)
де q – маса (q1 – головки балансира, q2 – переднього плеча балансира, q3 – заднього плеча балансира, q4 – траверси з опорою і шатунів з підшипниками); l – відповідні центри ваги; хс – маса допоміжного вантажу.
Тоді
![]() . (5.46)
. (5.46)
Загальну масу противаги визначають із виразів
![]() .
.
 . (5.47)
. (5.47)
![]() .
.
Аналогічним методом можна визначити маси противаг для кривошипного (Fк), комбінованого (Fкб) зрівноважування і зусилля при пневматичному зрівноважуванні (FП).
Залежності мають наступний вигляд
![]() , (5.48)
, (5.48)
![]() , (5.49)
, (5.49)
![]() , (5.50)
, (5.50)
![]() , (5.51)
, (5.51)
де Fк і Fкб – маса кривошипного і балансирного вантажів відповідно при комбінованому зрівноваженні.
При пневматичному зрівноваженні розміри циліндра і тиск газу в системі визначають із залежності. При пневматичному зрівноваженні розміри циліндра і тиску газу в системі визначають із залежності
Fп = fп·Р, (5.52)
де fп – площа перерізу циліндра;
Р – тиск в системі.
Об’єм балона приймають в 10 раз більше об’єму, який описує поршень зрівноважувальної системи. Це необхідно для того, щоб коливання тиску в системі, а відповідно і зрівноважувального зусилля були не більше 10 %.