

5.2.6 Гідроприводні штангові насосні установки
На рис. 5.14 показані схеми гідроприводних насосних установок. Приводний циліндр 3 з поршнем кріпиться на фланці свердловини. До поршня під’єднаний устьовий шток, який проходить через сальник 1. На штоці підвішена колона штанг. В установці є система гідроприводу А, яка подає рідину поперемінно в робочу порожнину циліндра і у зрівноважувальний пневмогідроакумулятор 5.
Зрівноважувальний акумулятор у гідроприводі дозволяє створити рівномірне завантаження приводного електродвигуна і зменшувати споживану потужність. Насос системи гідроприводу подає робочу рідину під поршень, піднімаючи колону штанг.
Робоча рідина при цьому поступає на прийом насоса під напором із акумулятора, де підтримується постійний тиск. Тиск підтримується стисненим газом, який знаходиться над рівнем рідини в акумуляторі. В кінці ходу вверх елементи керування 4 установкою переключають систему гідроприводу на подачу робочої рідини із робочого циліндра в акумулятор. При цьому штанги, які опускаються тягнуть поршень 3 вниз і він створює тиск рідини в циліндрі, подаючи її на прийом силового насоса системи гідроприводу. Таким чином, насос працює з підпором і при подачі робочої рідини в акумулятор. Тиск рідини в акумуляторі підбирається в таких межах, щоб двигун працював з постійною потужністю при ході штанг вверх і вниз.
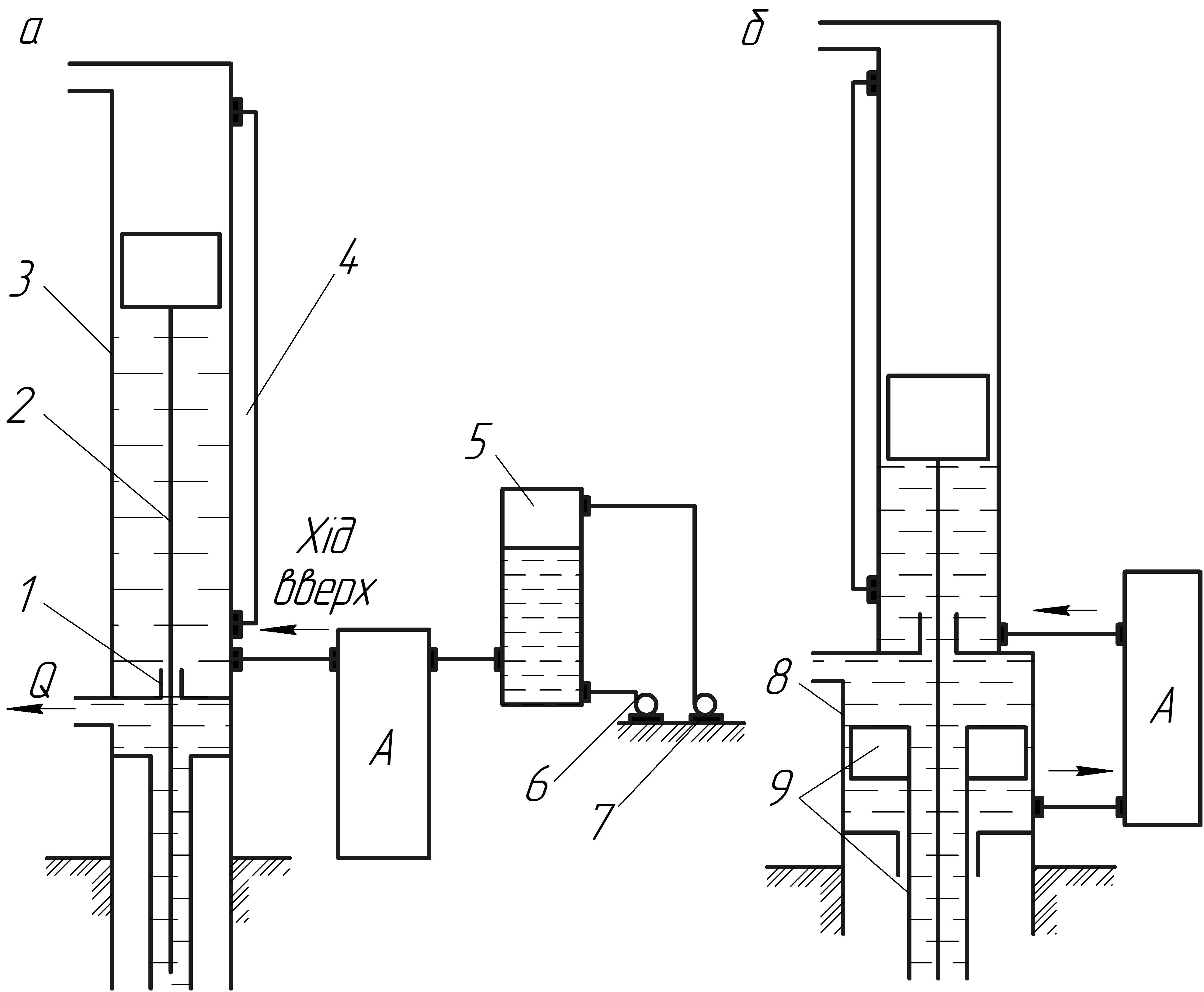
Рисунок 5.14 – Схеми гідроприводних штангових насосних установок
Для забезпечення стабільності роботи системи зрівноваження в схемі установки є компресор 7 для підтримання постійного тиску в акумуляторі і поповнення втрат газу. Втрати робочої рідини поповнюються допоміжним насосом 6.
Схема (рис. 5.14, б) для зрівноваження використовує вагу НКТ. Для цього на свердловині є зрівноважувальний циліндр 8, в якому на поршні 9 підвішені НКТ. Система гідроприводу подає рідину поперемінно в робочий і у зрівноважувальний циліндри, а вага штанг або НКТ створює підпір на прийомі насоса системи гідроприводу.
Застосування гідроприводу вимагає значно більшої уваги при обслуговуванні установок ніж балансирні верстати-качалки. Особливої уваги вимагають ущільнення рухомих частин і насос системи гідроприводу. Тому установки з гідроприводом, не дивлячись на малу металоємкість, не конкурентноздатні з балансирними верстатами-качалками малої потужності при довжинах ходу до 2,5 - 3,5 м.
Контрольні запитання
1 За якими ознаками класифікуються приводи ШСНУ?
2 Назвіть типи приводів ШСН.
3 Назвіть принципові відмінності аксіальних і дезаксіальних балансирних приводів ШСН.
4 Перелічіть основні параметри індивідуальних приводів ШСН.
5 Опишіть особливості конструкцій основних типів індивідуальних приводів ШСН.
6 Які переваги і недоліки безбалансирних верстатів качалок?
7 Які переваги і недоліки гідроприводних штангових насосних установок?
5.3 Кінематичний розрахунок балансирного приводу (верстата – качалки)
Кінематичний розрахунок ВК дозволяє визначити як на протязі подвійного ходу змінюються величини переміщення, швидкості і прискорення точки підвісу штанг.
Перетворюючий механізм ВК представляє простий плоский механізм І класу другого порядку (рис. 5.15).
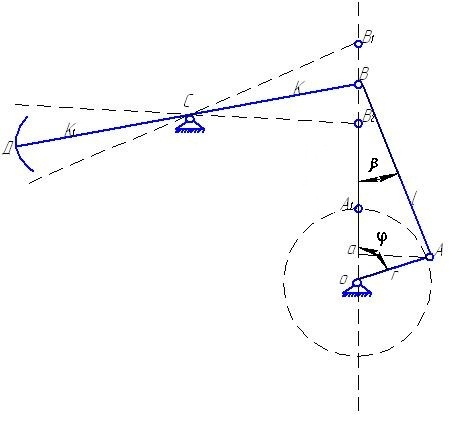
Рисунок 5.15 – Кінематична схема перетворюючого механізму
Позначимо: кривошип відрізком ОА довжиною r, шатун відрізком АВ довжиною l, плечі балансира – переднє відрізком ДС довжиною K1 і заднє – відрізком СД довжиною K.
В даний час відомі три способи визначення законів руху елементів ВК, які відрізняються підходом до аналізу перетворюючого механізму. Ці способи залежно від прийнятих припущень дозволяють з різною ступінню точності знайти закон зміни переміщення, швидкості і прискорення точки підвісу штанг.
1) Так звана елементарна теорія базується на таких припущеннях:
- перетворюючий
механізм розглядається як кривошипно-шатунний
![]() ,
,
![]() .
.
Звідси виходить,
що т. В
рухається по прямій В1В2,
а
![]() .
.
Зміна переміщення, швидкості і прискорення точки підвісу штанг при цих припущеннях буде здійснюватись за гармонійним законом.
2) Наближена методика базується на припущенні, що , траєкторія руху т. В – пряма, , тобто враховується кінцева довжина шатуна, так як при значній довжині ходу (4-6 м) відношеннях стає значною величиною.
3) При точних розрахунках враховують кривизну руху точки В, що дозволяє зменшити похибку при розрахунку. , =const.
Точні закони переміщення, швидкості і прискорення точки підвісу штанг можуть бути отримані двома способами: аналітичним і графічним.
Знайдемо закономірності на основі припущень, які відповідають наближеній методиці.
Довжина шляху Sв, який пройшла т. В при повороті кривошипу на кут рівна відрізку В1В. Спроектувавши т. А на вертикаль В1О, маємо
В1О = ОВ1 +ОВ, (5.1)
де В1О = r + l, а величина ВО = Оа + аВ.
Величини значень Оа і аВ можна знайти із прямокутних трикутників ВАа і ОАа.
аВ
= l∙cos![]() ,
Оа
= r∙cos
, (5.2)
,
Оа
= r∙cos
, (5.2)
Тоді:
Sв=r+l–(r∙cos +lcos)=r(1–cos )+l(1–cos ), (5.3)
За теоремою синусів для ∆ОАВ
![]() , (5.4)
, (5.4)
звідки
![]() . (5.5)
. (5.5)
Оскільки
cos![]() ,
cos
,
cos![]() , (5.6)
, (5.6)
то підставивши значення синуса і використовуючи наближену формулу для добування кореня, отримаємо
cos![]() . (5.7)
. (5.7)
Підставивши
отримане значення у вихідну формулу
для Sв
і замінивши
![]() ,
маємо:
,
маємо:

![]() . (5.8)
. (5.8)
Швидкість руху т.В можна визначити, якщо взяти похідну
Uв=![]() ,
,
![]() (5.9)
(5.9)
Прискорення отримаємо диференціюванням Uв
Wв=![]() . (5.10)
. (5.10)
Переміщення, швидкість і прискорення для т. Д знаходимо із врахуванням плеч балансира K1 і K.
![]() =
=
![]() ,
,
Sд
=
![]() ,
(5.11)
,
(5.11)
Uд
=
![]() ,
(5.12)
,
(5.12)
Wд
=
![]() .
(5.13)
.
(5.13)
Отримані формули
досить прості і можуть використовуватись
для наближених обчислень з достатньою
для практики точністю. З їх допомогою
неважко визначити, що максимальний шлях
Sд
буде
при
![]() =1800,
тобто Sд=
=1800,
тобто Sд=![]() ,
що максимальне значення швидкість
Uд
досягає при
=900
і 2700
і буде
рівна
,
що максимальне значення швидкість
Uд
досягає при
=900
і 2700
і буде
рівна
Uд
max=![]() .
(5.14)
.
(5.14)
Максимальне прискорення буде при =0 i 1800.
Wmax=![]() .
(5.15)
.
(5.15)
Рівняння
(5.11,5.12,5.13) описують закон руху точки
підвісу штанг при допущеннях, що
траєкторія руху т. В
– пряма. Якщо знехтувати і величиною
відношення
![]() ,
як це робиться в елементарній методиці,
то із отриманих залежностей після
підстановки в них =0,
отримаємо
,
як це робиться в елементарній методиці,
то із отриманих залежностей після
підстановки в них =0,
отримаємо
Sд=![]()
![]() ,
(5.16)
,
(5.16)
Uд=
![]() U,
(5.17)
U,
(5.17)
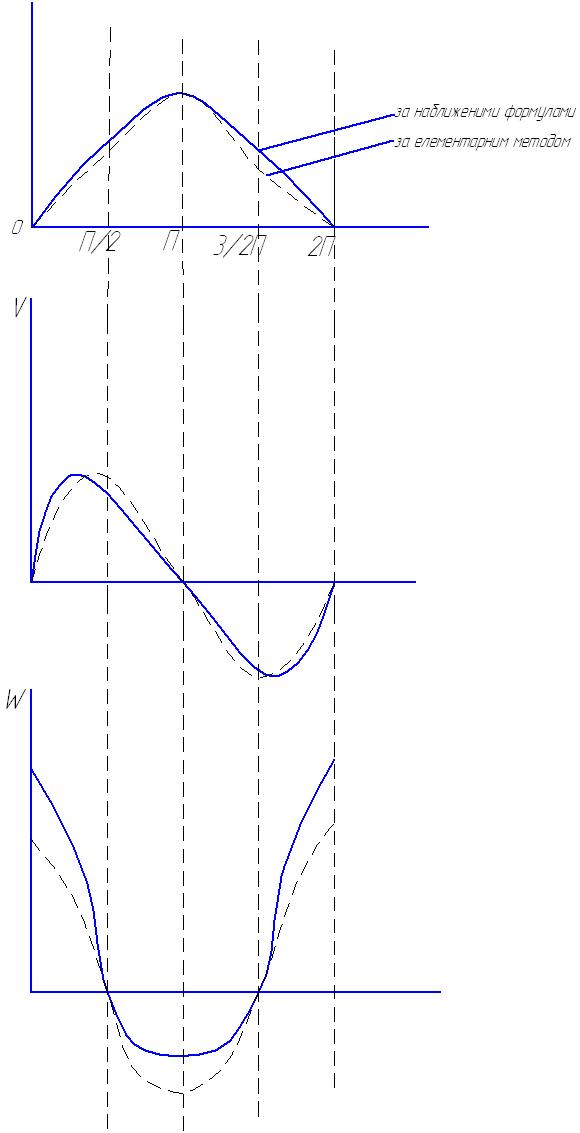
Рисунок 5.16 – Залежність переміщень (а), швидкості (б), прискорення (в) від кута повороту кривошипа φ
Wд
=
![]() .
(5.18)
.
(5.18)
Із аналізу цих залежностей виходить, що для балансирного ВК, у якого довжина радіуса кривошипа дуже мала в порівнянні з довжиною шатуна і балансира, закон руху підвісу точки штанг є гармонійним.
Гармонійний закон руху точки підвісу штанг – своєрідний еталон, з яким порівнюють фактичні закони руху точок підвісу штанг, які відрізняються від гармонійного в силу кінцевих довжин елементів перетворюючого механізму і ряду інших факторів, наприклад нерівномірності обертання кривошипа. Вплив співвідношення довжин елементів перетворюючого механізму може бути проілюстровано відношенням максимального прискорення т. Д, яке визначається за формулою (5.13) до максимального прискорення при гармонійному русі (формула (5.18)).
m=![]() –
коефіцієнт кінематичної досконалості.
–
коефіцієнт кінематичної досконалості.
Таким чином, навіть при аналізі наближених формул можна переконатись, що закон руху точки підвісу відрізняється від гармонійного в сторону збільшення максимальних прискорень. Причому ця відмінність тим більша, чим більше співвідношення r/l.
Для визначення показника m зручно користуватись формулою Алівердізаде К.С.
m= .
(5.19)
.
(5.19)
В залежності від глибини підвіски насоса величина mдоп. змінюється і для глибоких свердловин повинна бути m=1.
Чим більше реальний чотириланковий механізм відрізняється від ідеального, тобто чим коротше у нього шатун і заднє плече балансира (при даній незмінній довжині ходу), тим гірші експлуатаційні властивості, так як при цьому:
- зростають зусилля, які виникають в ланках і шарнірах механізму (шатуні, кривошипному пальці, на опорі кривошипного вала і т.д.), що призводить до посиленого зношення деталей ВК;
- зростають екстремальні значення крутного моменту (+/-) на кривошипному валу і в результаті посилюється знос зубів всіх шестерень і підшипників редуктора, а також пасової передачі електродвигуна.
Таким чином, чим менше відношення і , тим краще повинна працювати установка, але при цьому значно збільшуються габаритні розміри ВК; чим менше , тим більша висота ВК і чим менше , тим більша його довжина.
Звідси збільшується
металоємкість ВК, збільшуються розміри
його фундаменту і вартість монтажних
робіт. Наприклад: якщо замість і
![]() =0,5
прийняти
і
=0,3,
то висота ВК збільшується на 60 %, а довжина
станини (рами) – на 70%.
=0,5
прийняти
і
=0,3,
то висота ВК збільшується на 60 %, а довжина
станини (рами) – на 70%.
Таким чином, з однієї сторони з наближенням кінематичної схеми ВК до ідеальної, експлуатаційні властивості ВК покращуються і витрати на експлуатацію знижуються, а з другої сторони ростуть капітальні вклади (вартість ВК і його фундаменту). Звідси виходить, що для вибору оптимальних значень і потрібно знайти, використовуючи і розрахункові дані про зношення деталей ВК з різними значеннями і , суми експлуатаційних і капітальних затрат. Значення і , при яких вони мінімальні, і будуть оптимальними. При проектуванні вітчизняних ВК і для максимальних довжин ходу =0,4 і =0,5. Ці умови диктувались міркуваннями економії капітальних вкладень, без врахування економічних експлуатаційних затрат.
Якщо порівнювати дві кінематичні схеми, звичайну і більш досконалу, то, як показав аналіз, вибір більш досконалої схеми дає невеликий виграш у зниженні додаткових навантажень в шарнірах і ланках, що і послужило в свій час одним із аргументів для введення в стандарт і =0,5.
При виборі показників досконалості чотириланкового механізму потрібно приймати до уваги, що зношення підшипників кочення в шарнірах пропорційно діючому на них навантаженню в степені ~ 3. Тому, якщо зусилля збільшується на 5%, то зношення на ~ 16 %.
Немаловажне значення в теорії і практиці глибинно-насосної експлуатації має вплив ступеня досконалості чотириланкового механізму на роботу штанг.
В процесі розгляду відхилень величин швидкостей і прискорень від ідеальних значень при максимальних і мінімальних зусиллях в штангах за цикл дії насоса виявилось, що до значень =0,4 і =0,5 вплив цей не значний і ним можна нехтувати.
При збільшенні показників за межі вищевказаних значень максимальні навантаження на штанги зростають, а мінімальні – знижуються, що погіршує умови роботи штанг.
Контрольні запитання
1 Яка основна мета кінематичного розрахунку верстата-качалки?
2 Приведіть залежності для визначення переміщення, швидкості та прискорення точки підвісу насосних штанг.
3 Дайте визначення коефіцієнта кінематичної досконалості.
4 Приведіть формули для визначення коефіцієнта кінематичної досконалості верстата-качалки.
5 Яке оптимальне значення співвідношень і ?
6 Поясніть вплив співвідношень і на експлуатаційні характеристики верстатів-качалок.