

Контрольні запитання
1 Вкажіть область використання ШСНУ.
2 Назвіть основні переваги і недоліки ШСНУ.
3 Назвіть комплект обладнання ШСНУ.
4 Яке призначення основного обладнання ШСНУ?
5.2 Приводи шсн
Сучасними штанговими насосними установками можна видобувати нафту, як правило, з одного або двох пластів з свердловин глибиною до 3500 м з дебітом рідини від кубометра до декілька сотень кубометрів за добу.
Приводи штангового свердловинного насоса можуть класифікуватися:
1) за родом використовуваної енергії в передачі;
2) за числом обслуговуючих одним приводом свердловин;
3) за видом двигуна.
За родом використовуваної енергії розрізняють приводи: механічні, гідравлічні, і пневматичні. В механічному приводі свердловинного насоса основні функції виконують механічні передачі. Передавальною ланкою в гідравлічних приводах застосовуються рідини, а в пневматичних – повітря.
Загальна класифікація приводів штангових свердловинних насосів представлена на рис. 5.3.
Найбільш поширеними є механічні приводи штангових насосів. Конкретне застосування мають гідравлічні приводи насосів. Пневматичні механізми в якості привода насоса мають незначне застосування із-за багатьох істотних недоліків.
В механічних і гідравлічних приводах пневматичні механізми застосовуються як зрівноважувальні системи. Будь-який вид привода штангового насоса має первинний двигун, в якості якого використовують електричні або теплові двигуни. Роль теплового двигуна в основному виконують двигуни внутрішнього згоряння, працюючі на рідкому паливі, чи газові двигуни, працюючі на промисловому газі.
Залежно від числа обслуговуючих свердловин одним приводом останні можуть бути: індивідуальні або групові. В першому випадку біля кожної свердловини встановлюється свій індивідуальний привод з двигуном, ведена ланка привода з’єднана з колоною насосних штанг.
Індивідуальні механічні приводи виконують за різними принциповими схемами залежно від конструктивного призначення. В основному вони складаються з двох типів механізмів:
- для зниження швидкості обертання вала двигуна до числа ходів точки підвісу штанг;
- для перетворення обертового руху ланки зі зниженим числом обертів в зворотно-поступальний рух точки підвісу штанг.
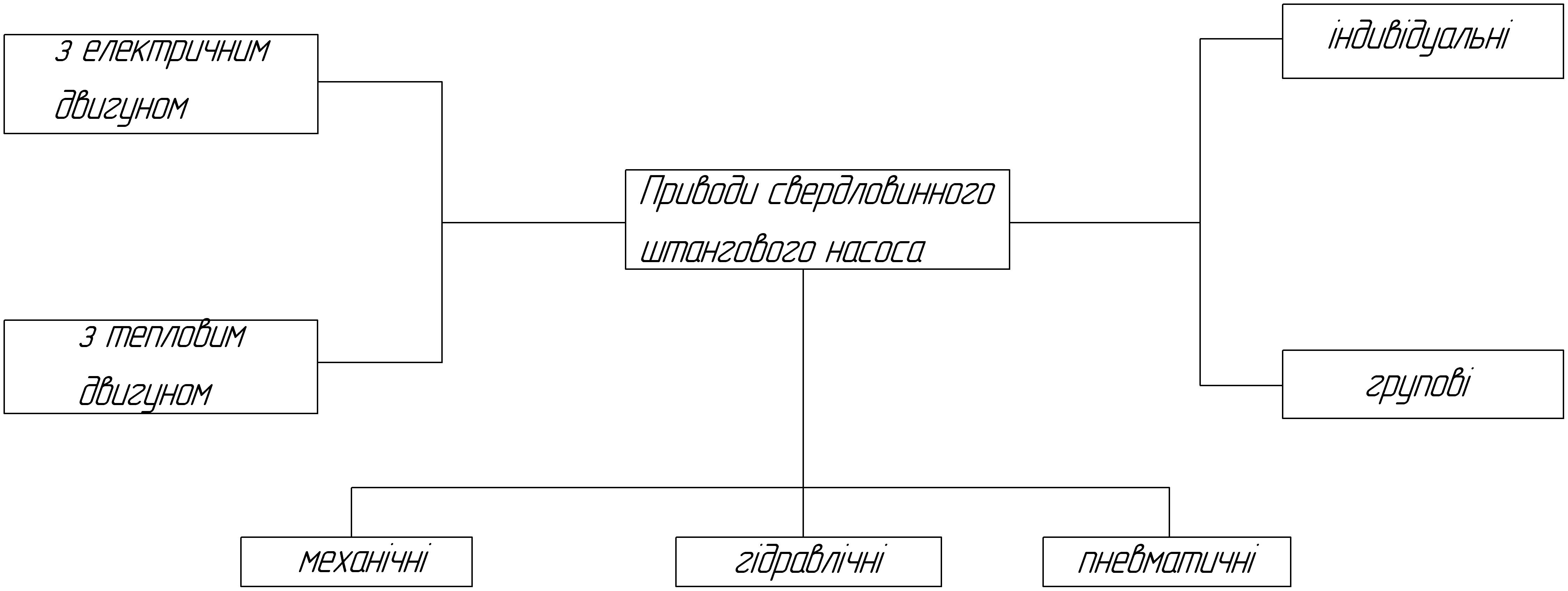
Рисунок 5.3 – Загальна класифікація приводів штангових насосів
Перша група механізмів названа трансмісією або передачею обертового руху, друга група - перетворюючим механізмом. Особливий вплив на роботу і конструкцію привода насоса має принципова кінематична схема перетворюючого механізму.
За видами перетворюючих механізмів, механічні приводи штангових насосів поділяються на дві групи: балансирні і безбалансирні.
В балансирному приводі вертикальний зворотно-поступальний рух точки підвісу штанг здійснюється за допомогою гойдаючого балансира (коромисла), а в безбалансирних приводах механічної дії цей рух здійснюється іншими механізмами без застосування гойдаючого балансира.
В нафтопромисловій практиці балансирні індивідуальні приводи називають верстатами - качалками.
Існує багато різноманітних конструкцій верстатів - качалок, виконаних за різними кінематичними схемами як трансмісій так і перетворюючих механізмів.
В даний час верстати-качалки випускають у двох виконаннях: типу СК (аксіальних) за ГОСТ 5866-76 (7 типорозмірів) і типу СКД (дезаксіальних) за ОСТ 26-16-08-87 (6 типорозмірів). Принципова відмінність дезаксіальних СКД верстатів-качалок від раніше використовуваних у нас виключно аксіальних СК в тому, що дезаксіальні верстати- качалки забезпечують різний час ходу штанг вверх і вниз, тоді як аксіальні – однаковий.
Якщо точка розташована на прямій В1В2 (див. рис. 5.4), то механізм аксіальний (звичайний), якщо праворуч від прямої В1В2, то механізм з додатнім дезаксіалом, якщо зліва, то механізм з від’ємним дезаксіалом. Навантаження точки підвісу штанг (ТПШ) за час ходу вверх і вниз різне, що обумовлене роботою штангового насоса. При ході вверх верстат-качалка здійснює роботу по підніманню штангової колони і стовпа рідини, при ході вниз штангова колона опускається під власною вагою, а вага стовпа рідини передається на труби. Очевидно, що якщо середня швидкість руху ТПШ при ході вверх буде менша, ніж при ході вниз, то це дозволить зменшити прискорення, а отже, і динамічні навантаження, що діють на штангову колону при ході вверх, тобто в той період, коли вона найбільш навантажена.
Виходячи з цих міркувань верстати-качалки виконують з невеликим від’ємним дезаксіалом, у яких час ходу вверх більший часу ходу вниз (див. рис. 5.5). Дуже великий дезаксіал також не бажаний, оскільки при цьому відбувається збільшення витікань через плунжер при ході вверх, з'являється можливість зависання колони штанг в трубах при ході вниз за рахунок більшої швидкості спуску, особливо при її роботі в похило-скерованих свердловинах і свердловинах з відкладеннями парафіну або гідратів.
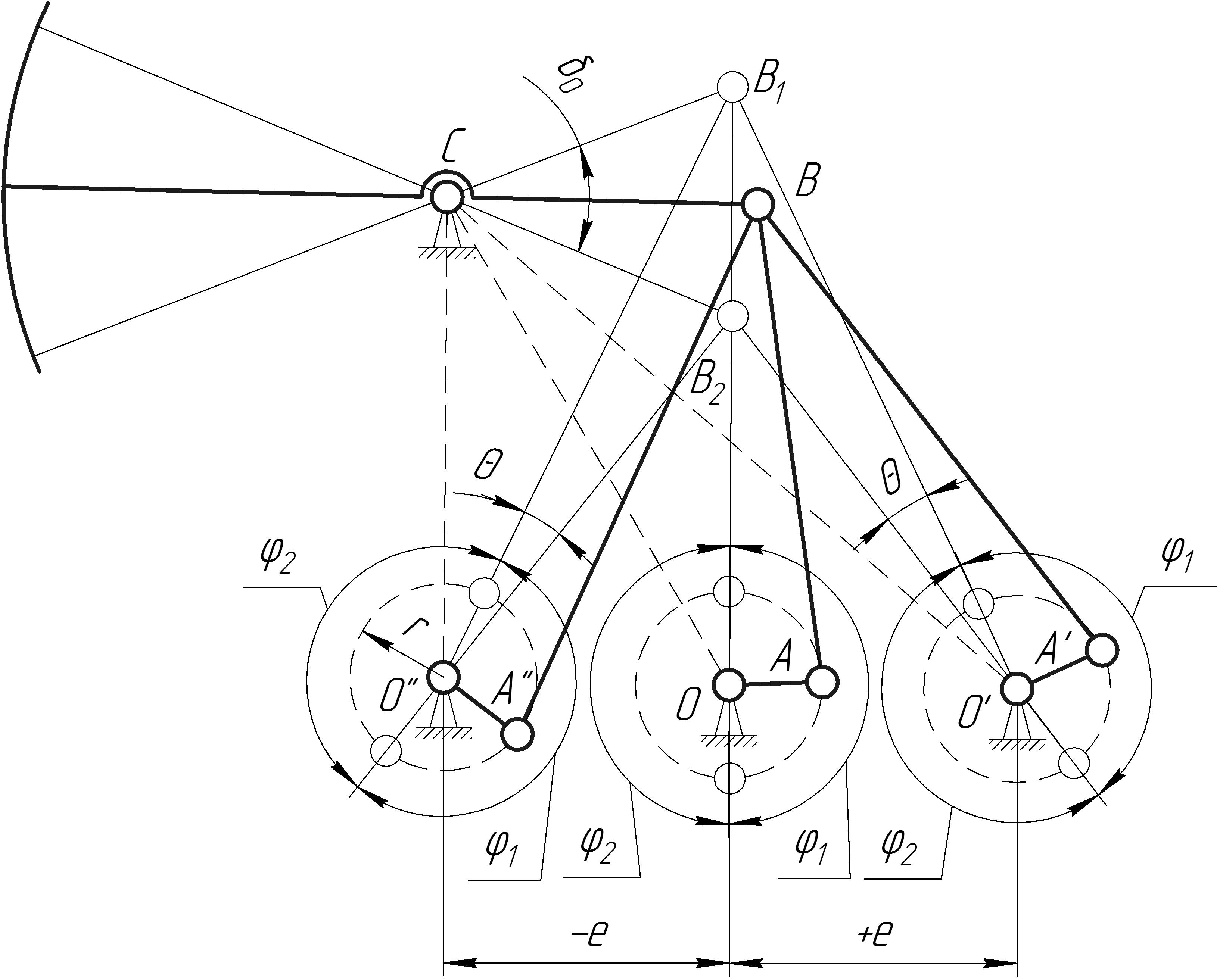
Рисунок 5.4 - Кінематична схема перетворюючого механізму верстатів-качалок
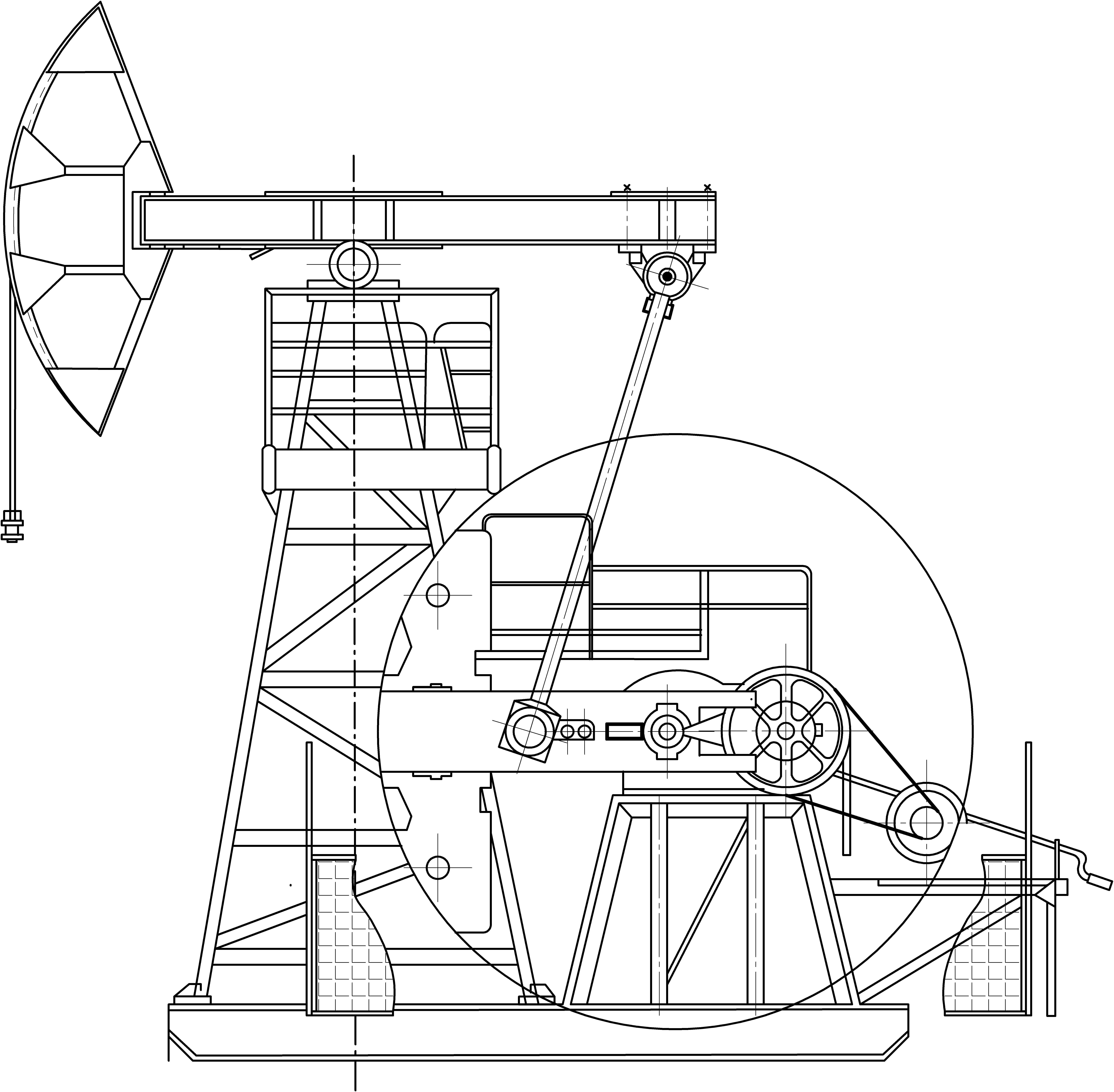
Рисунок 5.5 - Схема верстата-качалки СКД з редуктором на рамі і кривошипним зрівноваженням
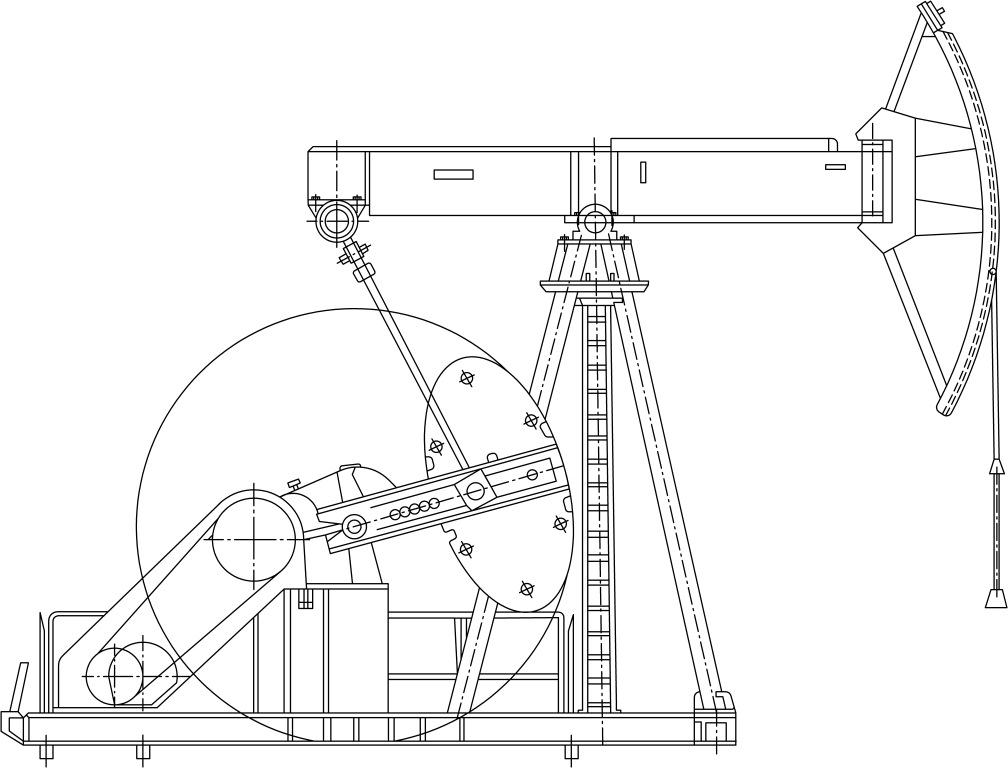
Рисунок 5.6 - Схема верстата-качалки СК з кривошипним зрівноваженням