

Уменьшение усилий на рычагах управления.
Аэродинамическая сила на управляющей поверхности зависит от площади поверхности, угла отклонения и приборной скорости. На больших и скоростных самолётах аэродинамические силы могут создавать большие шарнирные моменты, которые будет трудно преодолеть лётчику. В этом случае в системе управления устанавливаются гидравлические усилители или используются различные методы уменьшения усилий на рычагах управления аэродинамическими средствами (аэродинамическая компенсация).
Аэродинамическая компенсация.
Осевая компенсация.
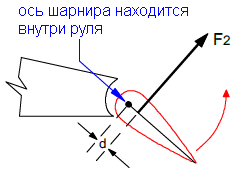
Если уменьшить расстояние (d), то уменьшается шарнирный момент. Чем меньше шарнирный момент, тем меньше усилия на рычагах управления, и тем легче лётчику отклонять управляющую поверхность. Осевая компенсация не уменьшает эффективность руля, а только уменьшает шарнирный момент.
Если точка приложения аэродинамической силы (F2) окажется вперёди оси шарнира, то наступит «перекомпенсация руля». Шарнирный момент поменяет свой знак, и усилия на рычаге управления сменятся на противоположные. Это очень опасно и конструктор обязан обеспечить, чтобы перекомпенсация руля не возникала во всех ожидаемых условиях эксплуатации самолёта.
Роговая компенсация.
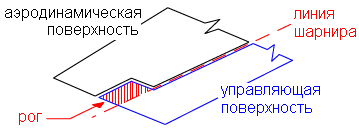
Принцип действия роговой компенсации тот же, что и у осевой компенсации. Аэродинамическая нагрузка на той части управляющей поверхности, которая находится впереди линии шарнира, даёт шарнирный момент, противодействующий шарнирному моменту основной части управляющей поверхности. Таким образом, суммарный шарнирный момент уменьшается, не ухудшая эффективность рулевой поверхности.
Внутренняя компенсация (балансировочная панель).
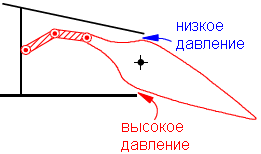
Данное устройство работает на том же принципе, что и осевая компенсация, но зона аэродинамической балансировки находится внутри крыла. Отклонение управляющей поверхности вызывает изменение давления возле поверхности руля. Давление возрастает со стороны отклонения и уменьшается с обратной стороны. Этот перепад давлений действует на панель внутри крыла, шарнирно соединённую с рулевой поверхностью. Шарнирный момент от балансировочной панели противодействует моменту от руля, что уменьшает суммарный шарнирный момент.
Сервокомпенсатор.
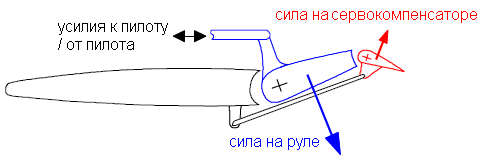
Предыдущие устройства аэродинамической компенсации усилий работали на принципе использования давления скоростного напора на часть управляющей поверхности, расположенную впереди линии шарнира. Сервокомпенсатор работает на принципе использования рычага силы, возникающей на дополнительной поверхности, которая расположена на задней кромке руля и отклоняется в противоположную сторону. Сила на сервокомпенсаторе создаёт момент, противодействующий шарнирному моменту руля. Пилот отклоняет руль, а руль отклоняет сервокомпенсатор. В отличие от предыдущих устройств, сервокомпенсатор немного уменьшает эффективность рулевой поверхности, поскольку сила на сервокомпенсаторе противодействует силе руля.
Антикомпенсатор.
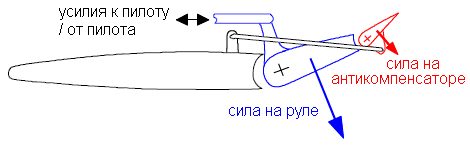
Дополнительная поверхность антикомпенсатора отклоняется в том же направлении, что и управляющая поверхность и увеличивает эффективность руля, но увеличивает шарнирный момент (создает дополнительное усилие на рычаге управления). Пилот отклоняет руль, а руль отклоняет антикомпенсатор.
Серворуль, флетнер (Anton Flettner - немецкий инженер, изобретатель серворуля).

Усилия пилота передаются только на серворуль. Аэродинамическая сила, возникшая на серворуле, приводит в движение всю управляющую поверхность. Руль отклоняется до тех пор, пока не наступит равновесие моментов сил управляющей поверхности и серворуля.
Если на управляющие поверхности самолёта установлены струбцины, то лётчик этого не определит, отклоняя рычаги управления, поскольку они напрямую не связаны с рулями. Устаревшие типы скоростных транспортных самолётов (Боинг 707) успешно используют серворули. Основной недостаток серворулей – ухудшение управляемости на малых скоростях.
Пружинный сервокомпенсатор.
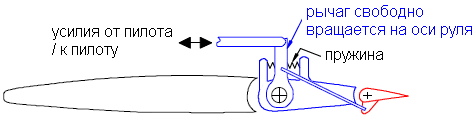
Пружинный сервокомпенсатор - это модификация серворуля, в которой отклонение серворуля пропорционально приложенному усилию от пилота. Тяги управления напрямую связаны с серворулём и имеют связь с управляющей поверхностью посредством предварительно затянутой пружины. На малых приборных скоростях нагрузка на управляющую поверхность невелика. Усилие от пилота не превышает усилие затяжки пружины и она работает как жесткая тяга. Пилот отклоняет управляющую поверхность и серворуль как единое целое, чем повышается эффективность управления.
Максимальную помощь пилоту пружинный сервокомпенсатор оказывает на больших приборных скоростях. Высокий скоростной напор противодействует отклонению управляющей поверхности, усилия приложенные пилотом приводят к сжатию пружины, серворуль отклоняется и возникшая на нём сила помогает пилоту отклонить управляющую поверхность.
Включение гидроусилителей в систему управления.
Если рассмотренные выше способы аэродинамической компенсации не обеспечивают приемлемых усилий на рычагах управления, тогда в систему управления включают гидроусилители. Существует два способа включения гидроусилителей – по обратимой и по необратимой схеме.
Подключение гидроусилителя по обратимой схеме.
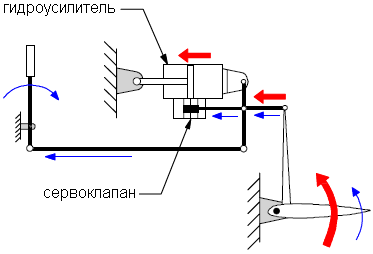
Как видно из рисунка, чтобы сместить сервоклапан (для приведения в работу гидроусилителя), необходимо на небольшую величину отклонить управляющую поверхность усилием пилота. Таким образом, малую часть шарнирного момента преодолевает пилот, а оставшуюся большую часть преодолевает гидроусилитель. При этом у пилота остаётся натуральное ощущение шарнирного момента от рулей, как и при полностью ручном управлении самолётом.
Подключение гидроусилителя по необратимой схеме.
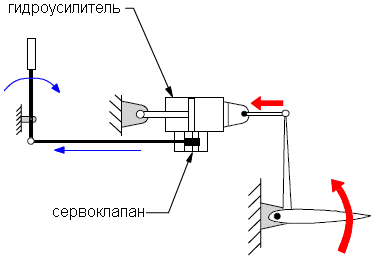
У более больших и / или более скоростных самолётов, шарнирные моменты настолько велики, что требуется применение необратимых гидроусилителей. При этой схеме все усилия от управляющей поверхности замыкаются на гидроусилитель. Чтобы сместить сервоклапан пилоту надо преодолеть только трение проводки управления.
Как показано на рисунке, смещение сервоклапана влево открывает проход для гидрожидкости в левую полость гидроусилителя. Корпус гидроусилителя сместится влево, и это приведет к отклонению управляющей поверхности. Как только корпус гидроусилителя достигнет той позиции, в которую пилот переместил сервоклапан, проход в полости будет перекрыт и движение гидроусилителя вместе с управляющей поверхностью прекратится. Несжимаемая гидрожидкость будет заперта в полостях гидроусилителя, и будет удерживать руль в неподвижном состоянии, пока пилот снова не переместит сервоклапан.
Поскольку аэродинамические нагрузки на рулях не в состоянии переместить рычаги управления в кабине, то такая схема подключения называется необратимой.
Имитация аэродинамической нагрузки на рычагах управления (“Q” feel).
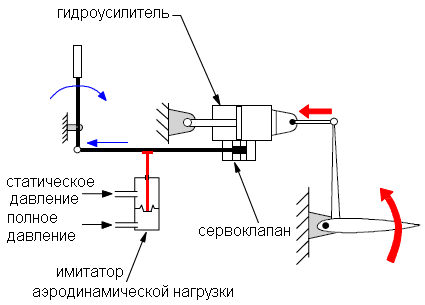
При необратимой системе управления ощущения аэродинамической нагрузки на рычагах управления создаются искусственно, чтобы удержать пилота от непреднамеренного создания больших перегрузок. На рисунке схематично показано устройство, чувствительное к скоростному напору ( V2 / 2 или “Q”).
Полное давление поступает в одну полость камеры, а статическое – в другую. Разность давлений, равная скоростному напору, деформирует диафрагму между полостями. Движение диафрагмы регулирует «командное» давление гидрожидкости, которое противодействует отклонению рычага управления пропорционально квадрату приборной скорости. В такой же пропорции растут усилия на рычаге управления при ручном управлении.
Дополнительно создаётся усилие, возрастающее по мере отклонения рычага управления от нейтрали – имитация возрастания шарнирного момента руля по мере увеличения его отклонения.
Балансировочный груз.
Балансировочный груз - это груз, прикреплённый к рулю впереди оси вращения. Большинство рулей имеют балансировочные грузы. Они устанавливаются для предотвращения флаттера руля. Флаттер руля – это колебания, которые могут произойти из-за изгиба и скручивания конструкции под нагрузкой. Если центр тяжести руля будет сзади оси вращения, то силы инерции вызовут колебания руля вокруг оси вращения. Колебания могут стать расходящимися и привести к разрушению конструкции. Подробное рассмотрение флаттера будет в главе «Ограничения».
Флаттер можно предотвратить, добавив груз впереди оси вращения руля. Это смещает центр тяжести руля на ось, или немного вперёд оси вращения.
Таким образом, убирается момент силы инерции относительно оси и предотвращается развитие флаттера.
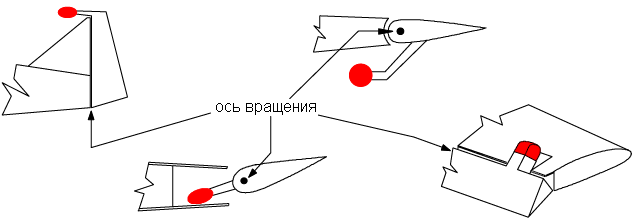
На рисунке показаны наиболее распространённые способы размещения балансировочного груза.