Заключение
В ходе курсового проектирования были рассмотрены методы построения кинематики конечностей роботов, а также выбран алгоритм инверсном кинематики в качестве основы для написания перемещения робота Hexapod’а. Были изучены принципы работы микроконтроллера сервомоторов. Было реализовано приложение, которое обеспечивает управление роботом Hexapod. Кроме того, в процессе реализации задачи, были получены сведения о портах ввода-вывода Arduino, изучены сведения о работе с последовательным портом в системах семейства Windows NT, а также средства Мicrosoft Visual Studio по работе с последовательным портом.
В процессе проектирования возникло несколько осложнений, связанных с работой сети Dinamixel AX-12. Одна из них – это формирование инструкций для сервомоторов, а точнее правильный синтаксис. Данная проблема была решена в процессе анализа временных диаграмм, статус пакетов, приходящих от сервомоторов. Кроме того, проблемой было отсутствие идентификатора сервомоторов. Данная проблемы была решена переназначением ID всех сервомоторов. Следующей проблемой стала калибровка сервомоторов относительно условного нуля который задавался механически.
Реализация данного робота, на шести конечностях, является сложной задачей, так как необходимо производить перерасчеты углов каждой конечности, а также учитывать особенности сервомоторов, у которых угол формируется из двух значений – старшего и младшего байта.
Список использованных источников
1. proMotion CDS55xx User Manual
2. Atmel Atmega640/V-1280/V-1281/V-2560/V-2561 DATASHEET
3. Atmel Atmega8U2/16U2/32U2 DATASHEET
4. В.М.Буданов. Алгоритмы планирования движений шестиногого шагающего аппарата. // Московский Государственный Университет 2005.197с
5. Информация по работе с платами Arduino// Режим доступа: http://robocraft.ru/
6. Информация по работе с платами Arduino// Режим доступа: http://arduino.ua/
3. http://rc-master.ucoz.ru/
4. http://www.dfrobot.com/wiki/index.php/Hexapod_Robot_Kit_(SKU:ROB0080)
5. http://www.engineer-this.com/IK.shtml
6. Работа со средствами Visual Studio// Режим доступа: http://msdn.microsoft.com/ru-ru/library/system.io.ports(v=vs.110).aspx
7. http://rezoh.ru/?p=1943
8. Описание USB интерфейса// Режим доступа: http://www.hardwarebook.info/Universal_Serial_Bus_%28USB%29
9. Описание похожего проекта// Режим доступа: http://habrahabr.ru/post/156579/
10. Работа с последовательным портом в Arduino// Режим доступа: http://www.gamedev.ru/code/articles/?id=4182
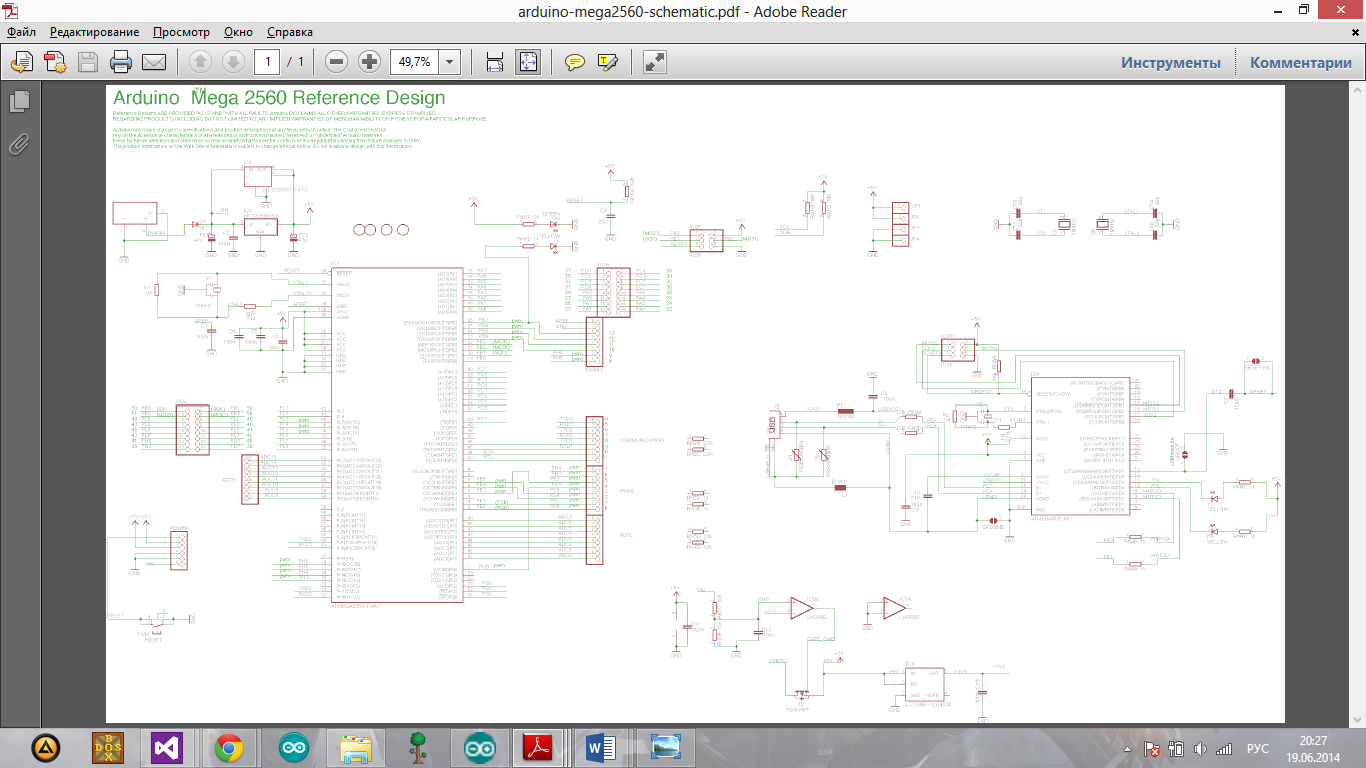
Приложение А. Схема Arduino Mega 2560
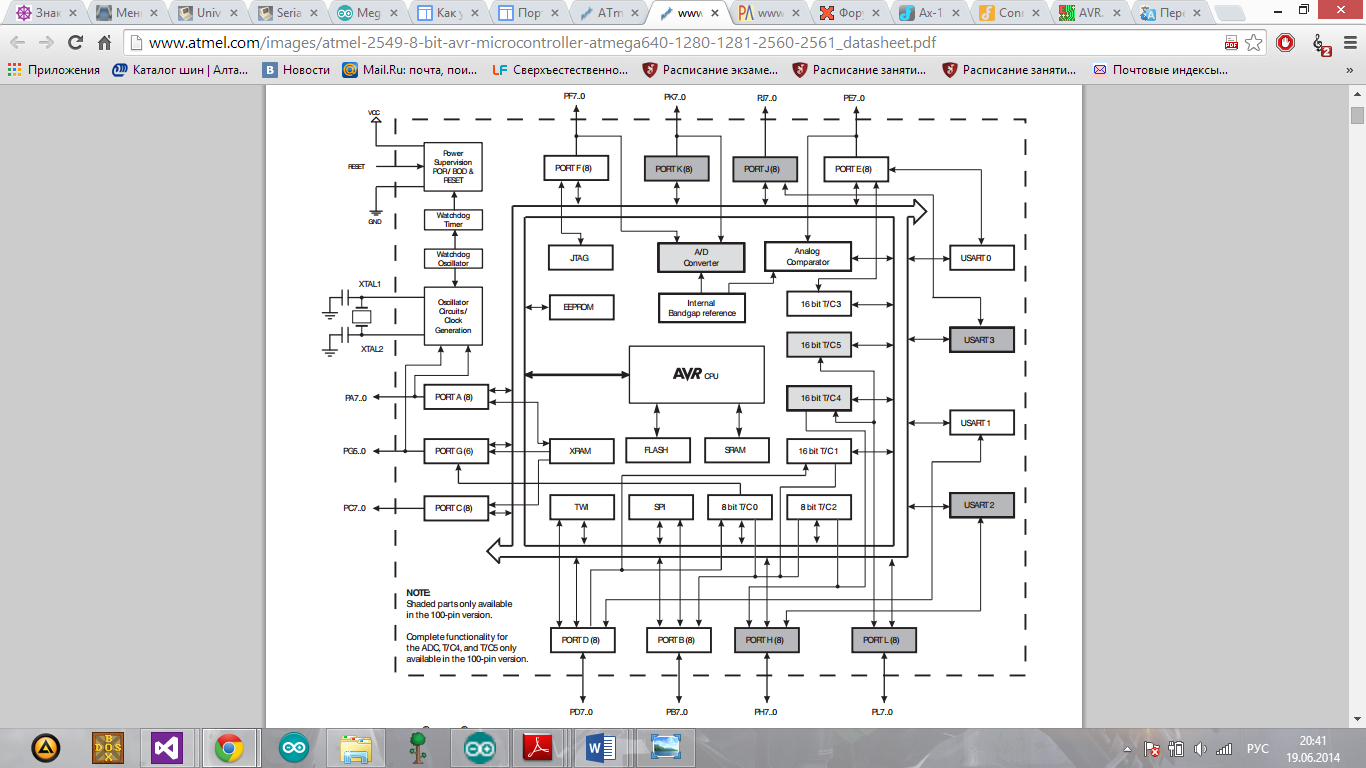
Приложение Б. Блок – схема микроконтроллера ATmega 2560
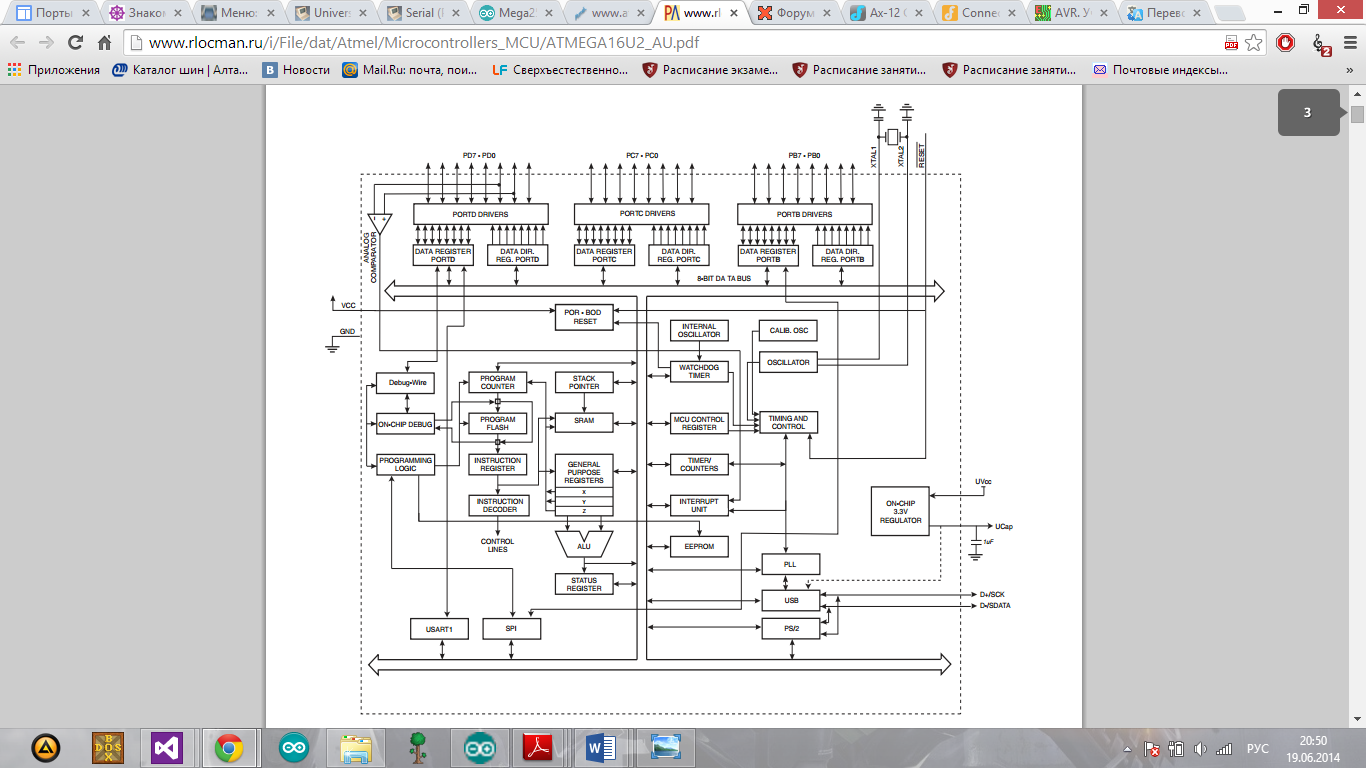
Приложение В. Блок – схема микроконтроллера ATmega8U
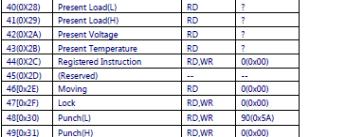
Приложение Г. Таблица 7. Инструкции контроллера сервомотора
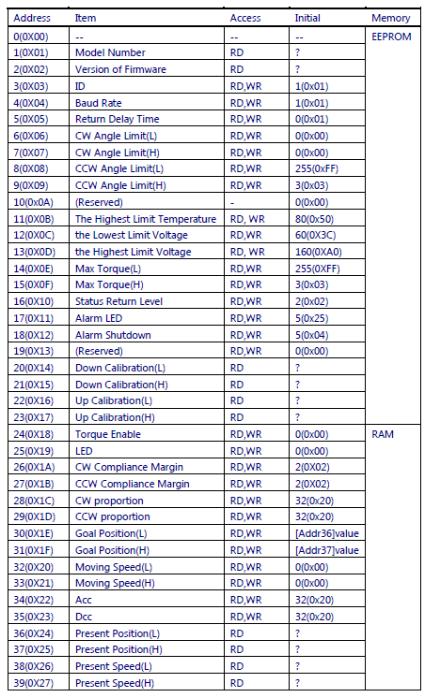
Продолжение таблицы в Приложении Д
Приложение Д. Продолжение Таблицы 7