

2.6 Автоматический синтез пид-регулятора
Одним из описанных в данных методических указаниях методов провести автоматизированный синтез ПИД регулятора для тех же исходных данных. ОСС системы с ПИД-регулятор приведена на рисунке 30:
Рис. 30.
Открыв блок PID Controller, воспользуемся функцией Tune для автоматической настройки (рисунок 32).
Рис. 31.
Рассчитанные автоматически коэффициенты приведены на рисунке 32:
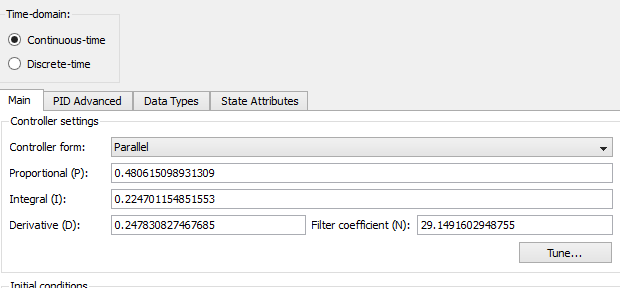
Рис. 32.
На рисунке 36 показана переходная характеристика с автоматической настройкой ПИД-регулятора:
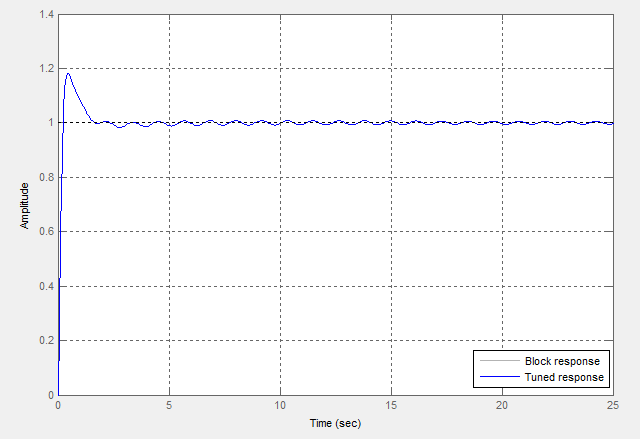
Рис. 33.
Из рисунка видно, что время переходного процесса и перерегулирование соответствуют заданным условиям, следовательно, можно сделать вывод, что настройка выполнена верно.
Заключение
В ходе выполнения данной работы были получены навыки построения функциональных схем систем регулирования простых динамических объектов, с анализом их назначения, возможностей, элементного состава и реализованных принципов управления. Также были приобретены навыки по синтезу систем управления для конкретных динамических объектов и анализу полученных результатов.
При выполнении курсовой работы закреплены знания, полученные на лекциях, лабораторных и практических занятиях, а также закреплены навыки работы в системе Simulink, в частности навыки, связанные с расчетом и настройкой ПИД-регулятора.
Список литературы
1. Кузовков Н.Т. Модальное управления и наблюдающие устройства. «Машиностроение». Москва. 1976. – 183 с.
2. Сборник рабочих электронных схем сайта s-led.ru: [Электронный ресурс]. Режим доступа: http://www.votshema.ru/251-shema-prostogo-regulyatora-yarkosti-lampy.html Свободный.
3. Ким Д. П. Теория автоматического управления. Т. 1. Линейные системы: учебник. – М.: ФИЗМАТ, 2007 г. – 292 с.
4. Востриков А.С., Французова Г.А. Теория автоматического регулирования. – НГТУ Новосибирск. 2006. – 367 с.