

2.3 Расчет регулятора, обеспечивающего заданное качество переходных процессов
Синтезировать
непрерывный модальный регулятор по
полному вектору состояния, обеспечивающий
заданное качество переходных процессов
(перерегулирование по выходной переменной
σ, время переходного процесса
 )
с точностью
.
Численные значения σ и
брать из таблицы исходных данных для
соответствующей неизменяемой части
системы автоматического регулирования.
Проверить результаты моделированием
на линейной модели.
)
с точностью
.
Численные значения σ и
брать из таблицы исходных данных для
соответствующей неизменяемой части
системы автоматического регулирования.
Проверить результаты моделированием
на линейной модели.
На рисунке 20 расположены корни исходной системы:
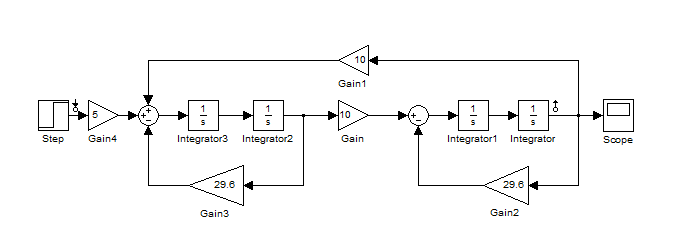
Рис. 19.

Рис. 20.


Для корректировки
заданной системы изменим положение
четырех корней характеристического
уравнения.
Рассчитаем
положение скорректированных корней.
Его действительная часть должна б. Из
cотношения
 ,
выразим
,
выразим
 Значит перемещенные корни должны быть
Значит перемещенные корни должны быть
 (p1,2)=
(p1,2)= .
.
(p3,4)= .
.
Запишем желаемое характеристическое уравнение:
(s+ -
- j)*(s+
+
j)*(s+
j)*(s+
+
j)*(s+ -
- j)*(s+
+
j)
j)*(s+
+
j)

Для нахождения коэффициентов регулятора приравняем коэффициенты полиномов при одинаковых степенях. Расчеты коэффициентов выполнены в системе Mathcad и приведены ниже:
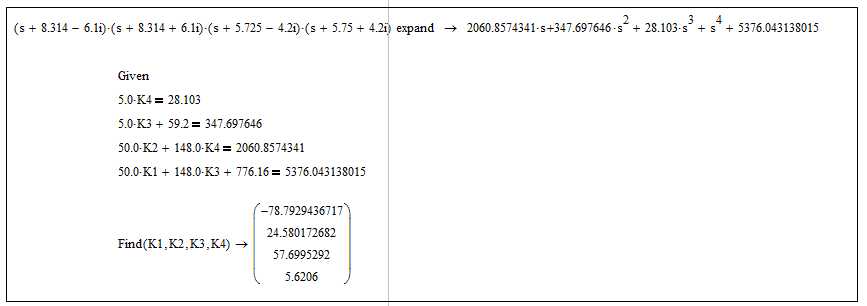
Рис. 21.
Из расчета приведенного выше получаем коэффициенты:
K01=-78.7, K02=9.724.58, K03=45.957.6, K04=5.6
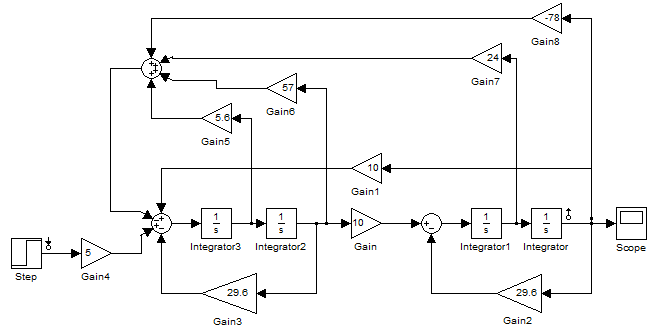
Рис. 22.
Переходная характеристика приведена на рисунке 23:
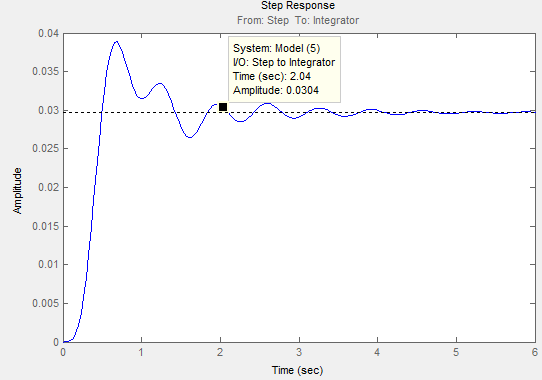
Рис. 23.
Время переходного процесса укладывается в 2 секунды, а перерегулирование в 20%.
2.4 Грубость системы
Изменяя параметры модального регулятора в интервале 10% путем моделирования проверить грубость полученной замкнутой системы.
На рисунке 26 приведена ОСС в Simulink, с увеличенными на 10% коэффициентами (K001=32.864, K002=8.751, K003=7.053, K004=3.432):
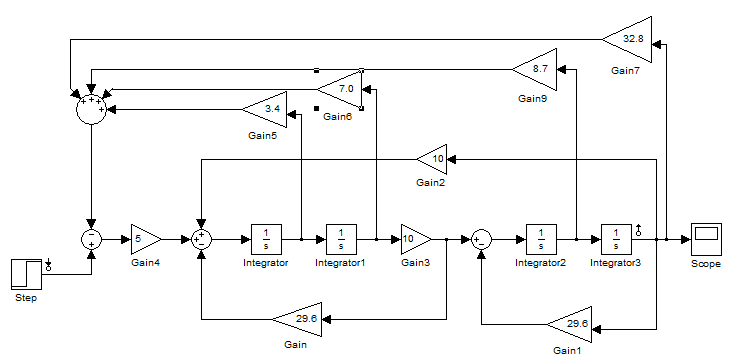
Рис. 24.
На рисунке 27 приведена ОСС в Simulink, с уменьшением на 10% коэффициентами (K01=26.8, K02=7.16, K03=5.7, K04=2.8):
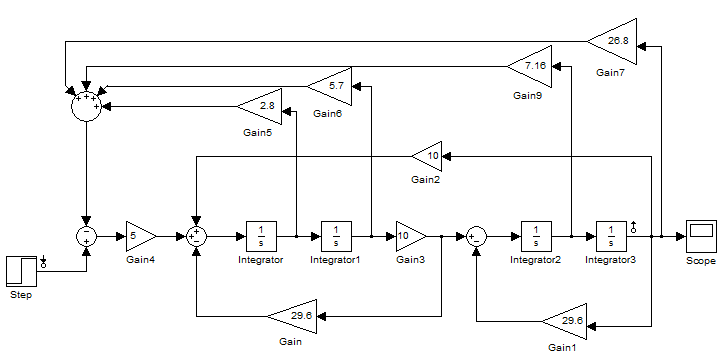
Рис.25.
На рисунке 28 приведены три переходных процесса. Сверху в низ: первый-уменьшение коэффициентов на 10%, второй-с коэффициентами без изменения, третий-с увеличением коэффициентов на 10%. Отсюда видно, что при уменьшении значения коэффициентов на 10%, перерегулирование 22%, а при увеличении значения коэффициентов, перерегулирование 8.4. Следовательно, при изменении модального регулятора в интервале 10%, система не соответствует заданным условиям, значит система грубая.
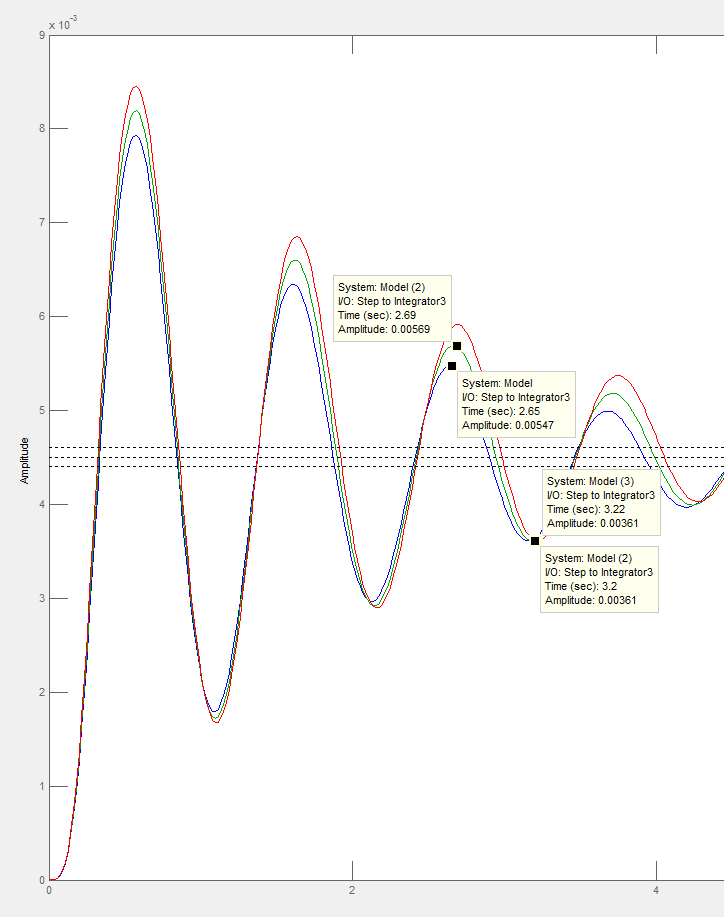
Рис. 26.
2.5 Итерационный синтез пид-регулятора
Провести итерационный синтез ПИД регулятора, ориентируясь на исходные данные пункта 2.4. Начальное приближение получить одним из рекомендованных в данных методических указаниях методов. Проверить результаты моделированием.
Так как уже есть интегратор, следовательно, ошибка исключена, поэтому нам нужно синтезировать ПД регулятор.
Воспользуемся методом Циглера-Никольса. Регулируя пропорциональную составляющую регулятора, добьемся возникновения в системе незатухающих колебаний с периодом Ткр, и зафиксируем значение Ккр. На рисунке 27 приведена структурная схема в Simulink:
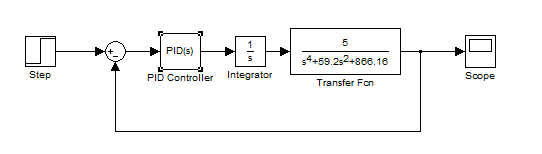
Рис. 27.
График переходного процесса приведен на рисунке 28:
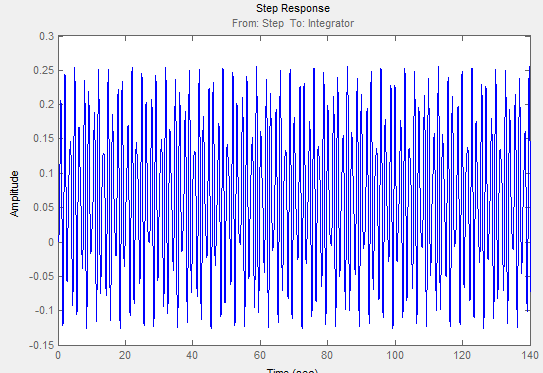
Рис. 28.
Вывели систему на границу устойчивости. Отсюда получаем следующие параметры:
Ккр=51.68 2,7
Ткр=0,5сек.
Далее рассчитываем и устанавливаем параметры ПД-регулятора:
 =0,25
=0,25
 =0,22
=0,22
 =0,24
=0,24
Смоделируем систему при полученных коэффициентах ПД регулятора (рисунок 29):
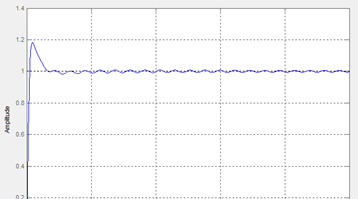
Рис. 29.
Как видно из рисунка, перерегулирование и время переходного процесса устраивают заданным условиям.