

Особенности управления дсп постоянного тока.
Регулирование напряжения на дуге осуществляется путём перемещения электродов. При этом происходит изменение сопротивления дугового промежутка и, соответственно, тока. Токовый разбаланс быстро отрабатывается тиристорным преобразователем. Регуляторы перемещения электродов идентичны, применяемым для печей переменного тока. Однако условия работы их существенно облегчены. Возмущения в процессе менее интенсивны, нет узких колодцев, взаимовлияния фаз и т.д. Параметры контроля в основном те же, что и в печи переменного тока: температура металла, химсостав, температура охлаждающей конструкции печи воды, параметры дутья и отходящих газов, давление и температура масла в трансформаторном агрегате, электрические параметры: токи (отдельно ток сводового электрода и токи подовых электродов), напряжение дуги, ток напряжения, мощность высокой стороны, счетчики активной и реактивной энергии. Однако есть и специфические измерения. Это - температура подовых изоляции, протока воды на охлаждение подовых электродов, температура и давление циркуляционной воды на входе и выходе теплообменника тиристорного преобразователя.
Билет 4 вопрос 1
Микропроцессорные регуляторы с тиристорными усилителями
В настоящее время в России серийно выпускается микропроцессорный регулятор типа РММ. Ниже, приводится описание его работы
Аппаратная часть системы
Регулятор типа РММ включает процессорную плату, на которой размешены микроконтроллер МК-51 и устройства ввода-вывода информации, блоки гдата1сия (включая источник неотключаемого питания), силовые блоки, шунты или датчики тока, согласующие трансформаторы. Схемы формирования сигналов тока фаз, снимаемых с шунтов (или датчиков тока) представлены на рис. 38.
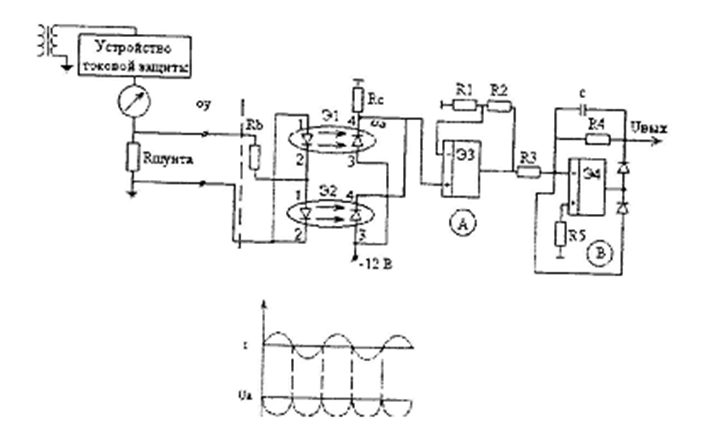
Схема измерения включает трансформатор тока, во вторичные обмотки которого включены калиброванные шуты Rш. Падение напряжения на шунтах пропорционально мгновенным значениям тока. Далее сигнал с шунта поступает на устройства гальванической развязки - оптоэлектронную пару Э, и Э2»где кроме развязки от входной электрической цепи происходит выпрямление сигнала (см. график Uа), масштабирование под стандартный входной диапазон используемых аналого-цифровых преобразователей (АЦП) - операционный усилитель Э3 и сглаживание сигнала с помощью согласующего устройства (операционного усилителя - Э4) - Uвых . Подключение нескольких сигналов датчиков к АЦП осуществляется с помощью коммутаторов.
Аналогично преобразуются сигналы напряжения, которые также проходят через согласующие устройства (согласующие трансформаторы или делители) и сигналы таходатчиков, измеряющих скорость вращения двигателей. Сигналы нескольких датчиков, поочередно подключаемые
коммутатором к АЦП, далее поступают на параллельный порт микроконтроллера или микроЭВМ.
Обработка поступившей информации осуществляется в зависимости от требований к ней в соответствии с программой, реализуемой алгоритмом.
Количество отсчетов на протяжении одного периода промышленной частоты 50 Гц определяется инерционностью используемых элементов. Так, быстродействие АЦП (задержка 20 мкс) позволяет при измерении силы тока (три значения) и напряжения (три значения) получать 128 отсчетов на периоде по каждому сигналу. Суммированием этих сигналов можно получить действующие и среднее значения за период или больший промежуток времени более точно, чем при аналоговом измерении при практически любой форме сигнала. Время усреднения сигнала при управлении соразмерятся с задержкой сигнала в цепи управления.
Эти сигналы с помощью коммутатора подключаются к аналого-цифровому преобразователю и поступают в микроконтроллер.
На выходе из микроконтроллера сигнал, время появления которого пропорционально разбалансу, усиливается и подается на тиристор силового блока.
Программная часть системы.
Программа, реализующая алгоритм работы системы, размещается в I Г ЗУ контроллера. Схема алгоритма приведена на рис. 39.
Автоматически или вручную устанавливается заданная ступень напряжения трансформатора и задание тока регулятору 1зад.
Перспективными датчиками тока являются датчики, использующие эффект Холла. Они могут измерять токи до 60000 А и имеют задержку т< 2-3 мкс.
При включении высоковольтного выключателя и нахождении переключателя режима "Автоматический-ручной" в положении "Автоматический" система начинает функционировать автоматически. Вычисляется разбаланс I, определяется соответствующая стадии зона нечувствительности. При этом величина зоны нечувствителыюсти В меняется в зависимости от того, стоял или двигался исполнительный механизм. Когда параметр регулирования находится в пределах зоны нечувствительности и исполнительный механизм находится в покое, зона нечувствительности больше ( В'' - рис. 40, рис. 41), чтобы избежать ненужных перемещений при малых разбалансах; когда исполиителъный механизм двигается, ликвидируя разбаланс, зона 11ечувствительности сужается, чтобы более близко подойти к заданному значению ( - рис. 40, рис 41).
В начале плавки токи фаз I равны нулю, возникающий разбаланс заставляет исполнительный механизм перемещать электрод вниз до касания шихты (условие остановки электрода - I=0, Uф=0 ). При этом электрод, первым достигший уровня шихты, остановится, так как при этом ток останется равным нулю (для его возникновения необходимо наличие второй фазы, т.е. подход и второго электрода), напряжение фазы упадет до величины, близкой к нулю. Данный электрод не будет двигаться до тех пор, пока не появится ток в фазе. Предусмотрены форсированные режимы перемещения электрода при коротких замыканиях (I>Imax)и разрывах дуг (I = 0)а также остановка двигателя при отсутствии перемещения электрода (Uoc=0) и при наличии разбаланса (I неравно 0) - случай самопроизвольной остановки двигателя, например, при попадании непроводящих кусков шихты.
Наиболее важной для регулятора является его статическая характеристика - зависимость скорости перемещения электрода (двигателя) от величины разбаланса. Угол наклона этой линии к оси абсцисс определяет коэффициент усиления регулятора. Поскольку объект имеет переменный коэффициент передачи, изменяющийся по ходу процесса, то в принципе и регулятор должен подстраивать свой коэффициент усиления и, соответственно, статическую характеристику под эти изменения. Обычно это осуществляется дискретно, при переходе от одной стадии к другой. Но даже внутри одной стадии на одной статической характеристике коэффициент усиления отличается в зависимости от величины разбаланса.
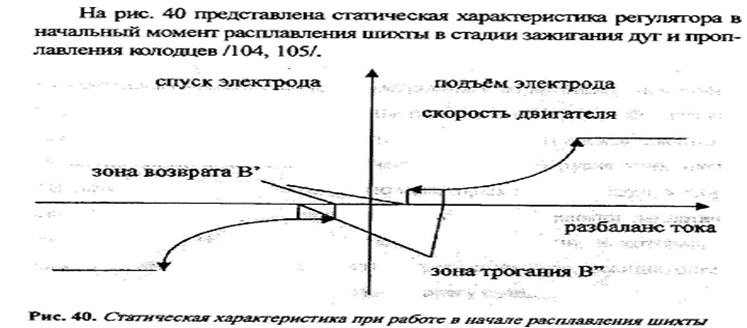
Эти стадии характеризуются неустойчивоспъю горящей дуги на холодный металл, в связи с чем возникают частые обрывы дуг и короткие замыкания. Основная задача регулятора в это время - быстрая ликвидация этих состояний, не допуская режима автоколебаний. Это обеспечивает пологость характеристики при небольших отклонениях от заданного режима и соответствующий характер отработки возмущений при значительных разбалансах. Как указывалось выше, изменяется величина зоны нечувствительности В" и В' . Использование близких к максимальным значениям скоростей двигателей наряду с эффективным торможением (противовключением) позволяет быстро устранять возникающие возмущения, в то же время не допуская "выбега" исполнительного механизма и предотвращая появление автоколебаний.
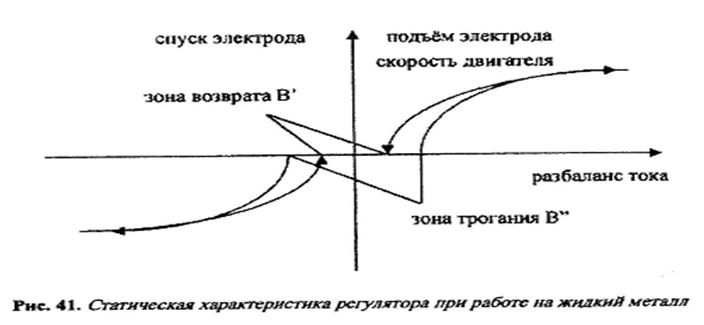
На рис. 41 приведена статическая характеристика регулятора для стадии закрытых Дуг, когда дуга, экранированная шихтой, горит на жидкий металл. В этот момент в печь вводится максимальная мощность. Стадия закрытых дуг характеризуется достаточно сильными возмущениями -продолжительными короткими замыканиями, вызываемыми обвалами шихты, которые во избежание срабатывания токовой защиты требуется устранять в кратчайшее время. Этому способствует соответствующий подъем на статической характеристике. Анализ сигналов тахогенераторов, с помощью которых измеряется частота вращения двигателей, и фактического напряжения, подаваемого на двигатель, позволяет диагностировать наличие токонепроводящей шихтыили неисправности механизма перемещения электродов и остановить двигатели: Uoc неравно 0 Uдв неравно 0 -условие остановки.
Во избежание пиковых бросков силы тока при включении двигателей используются специальные разгонные характеристики, что позволяет осуществлять плавный запуск двигателей.
На стадии открытых дуг форма статической характеристики также претерпевает изменения. В этой стадии практически отсутствуют короткие замыкания, связанные с обвалами шихты. Поэтому характеристика является практически пропорциональной. Зона нечувствительности регулятора может быть еще меньше в связи с уменьшением градиента потенциала в столбе дуги.
Указанные статические характеристики находятся в памяти контроллера (в его банке) в виде таблиц, составленных с приемлемым шагом дискретности по разбалансу ∆I. Сигнал для перехода от одной статической характеристики к другой формируется вне регулятора, Это может быть сигнал датчика, сигнал переключения ступени напряжения или инициативный сигнал сталевара. Строго говоря, в таблицах содержится не непосредственно сигнал скорости или напряжения, подаваемого на двигатель, а угол зажигания тиристора или время от синхроимпульса, определяющего начало периода питающего тиристор напряжения φ(рис. 42). Очевидно, угол может меняться от 0 до 180° и чем он больше, тем меньше подаваемое на двигатель выпрямленное напряжение. Время при частоте 50 Гц изменяется от 0 до 10 мсек. Это время является заданием таймеру, на вход которого поступают импульсы от тактового генератора
контроллера и при насчитывании соответствующего времени из таблицы таймер выдаст сигнал на управляющий электрод тиристора.

Билет 4 вопрос 2
2.1.5 Использование двигателей переменного тока в качестве исполнительных механизмов перемещения электродов
Двигатели переменного тока являются более экономичными, удобными в эксплуатации, дешевыми «км двигатели постоянного тока. К тому же они, не требуют дорогостоящих преобразователей переменного тока в постоянный. Главным их недостатком считалось невозможность в определенном диапазоне регулирование скорости вращения. В настоящее время разработаны способы частотного управления асинхронными двигателями взаимосвязанным изменением частоты f1 и напряжения питания статора U1
Частотой f1 определяется значение скорости вращающегося поля статора ωo :

*-
где р-число пар полюсов. Соответственно, частотой f1 определяет и скорость вращения ротора (с учетом скольжения S ).Необходимость регулирования напряжения U1, в функции частоты f1, объясняется следующим: ЭДС Е1 обмотки статора пропорциональна частоте и потоку Ф : Е1=с .Ф.f1 .поэтому с*Ф=E1/f1.
При
допущениях
![]() R1-сопротивление
обмотки статора, XI
- индуктивное сопротивление рассеяния).
R1-сопротивление
обмотки статора, XI
- индуктивное сопротивление рассеяния).
Если изменять только частоту f1, то при ее уменьшении поток будет увеличиваться и двигатель насытится, а при ей увеличении поток будет уменьшаться и следовательно, уменьшиться момент двигателя.
Дня получения постоянного максимальною момента Мк= const
Для
изменения от 0 до номинального значения
![]() частота также будет меняться;
частота также будет меняться;
![]() .
.
Частотнос управление, основанное на взаимосвязанном регулировании частоты и напряжения питания двигателя называют скалярным управлением. Скалярное управление обеспечивает удовлетворительные характеристики статических и "медленных" переходных режимов электропривода в ограниченном диапазоне регулирований (до 1:10), что впрочем оказывается достаточным для большинства общепромышленных электроприводов.
Более прогрессивным методом частотного управления асинхронным двигателем, обеспечивающим высокое качество статических и динамических характеристик электропривода в широком диапазоне регулирования, является векторное управление. Векторное управление предполагает взаимную ориентацию векторов тока и потока в процессе регулирования. При этом контролируются величина и фазовый угол моментообразуюшей (активной) и потокообразующей (реактивной) составляющих тока статора. Для анализа и синтеза алгоритмов векторного управления используются двухфазная модель обобщенной электрической машины и математический аппарат координатных и фазных преобразований переменных.
Векторное управление применяется в высоко динамичных широко регулируемых электроприводах сложных производственных машин и механизмов.
При управлении дуговыми печами вполне приемлемыми являются частотные методы, основанные на взаимосвязанном регулировании частоты и напряжения питания.
Обычно используются двухзвенные преобразователи частоты с промежуточным звеном постоянного напряжения или тока на основе автономных инверторов. Такой преобразователь состоит из трех основных частей.

На рис. 44 В • выпрямитель, управляемый (тиристорный) или неуправляемый (диодный); Ф - фильтр постоянного напряжения; АИ - автономный инвертор.
Современные автономные инверторы напряжения выполняются на основе либо тиристоров, либо биполярных транзисторов с изолированным затвором ЮВТ. Трехфазная мостовая схема инвертора представлена на рис. 45.
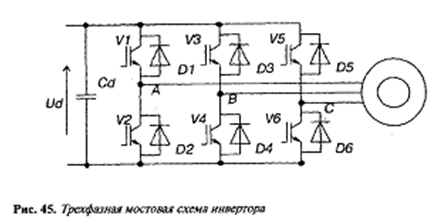
Основные элементы схемы: емкостной входной фильтр Сd включенные встречно-параллельно управляемые ключи VI...V6, диоды обратного тока Д1 ...Д6.
За счет поочередного переключения ключей VI ...V6 постоянное входное напряжение Ud преобразуется в переменное прямоугольно-импульсное выходное напряжение. Регулирование выходного напряжения может осуществляться двумя способами: амплитудными за счет изменении величины входного напряжения (М и широтно-импульсными (ШИМ) за счет программы переключения вентилей VI...Vб при Ud - const.
Пример получения из постоянного выпрямленного напряжения синусоиды показан на рис. 46. Как видно из рис 46. синусоида аппроксимируется прямоугольными импульсами одинаковой амплитуды и разной длительности.
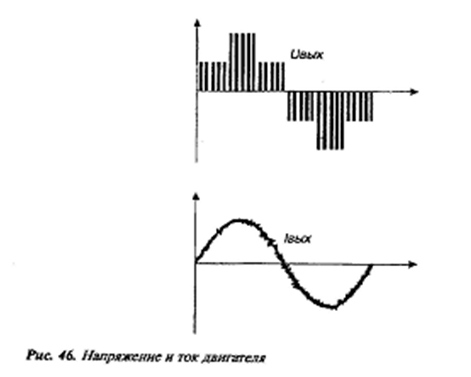
Частота аппроксимирующих синусоиду импульсов 1 - 16 кГц. Чем выше частота, тем меньше искажения при аппроксимации и, соответственно, потери в двигателе. Однако с повышением частоты увеличиваются высокочастотные шумы и ухудшаются условия роботы ключей инвертора. Наиболее употребительный диапазон 2-8 кГц,
Аналогичные инверторы с мощными транзисторными ключами используются в настоящее время и для управления двигателями постоянного тока. Также используется широтно-импульсное управление, когда величина напряжения, подаваемого на двигатель, пропорциональна длительности импульса. При частоте коммутации ключей 2-4 кГц получается практически непрерывный ток якоря даже при малых значениях разбаланса и, соответственно, тока якоря двигателя перемещения электродовв ДСП (что практически недостижимо при использовании тиристорных усилителей).
Билет 5.