

16. Теорія автоматичного управління спеціальними системами
1. Як називається величина кута між від’ємним напрямком дійсної півосі та радіус-вектором, проведеним з початку координат до точки перетину АФЧХ розімкнутої системи з колом одиничного радіусу?
1) Запасом стійкості за фазою.
2. Часом регулювання називається
2) мінімальний час, після якого відхилення вихідної величини h(t) від усталеного значення не буде перевищувати деякої наперед заданої величини .
3. Перерегулюванням називають
1) максимальне відхилення перехідної характеристики від усталеного значення.
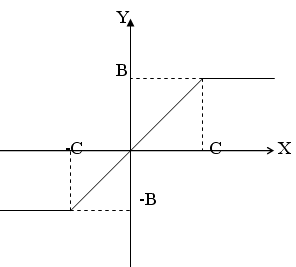
4. Який з наведених математичних виразів відповідає статичній характеристиці нелінійного елемента.
5. Що називають фазовою траекторією?
2) Лінія, яку описує зображаюча точка при русі системи.
6. Стійкість нелінійної системи при нескінченно малих відхиленнях регульованої величини від усталеного режиму, це:
2) Стійкість у малому.
7.
Система зі стійкою лінійною частиною
абсолютно стійка у класі стаціонарних
нелінійних характеристик y = (x)
підкласу (![]() ),
якщо через точку –1/k на дійсній осі
комплексної площини
),
якщо через точку –1/k на дійсній осі
комплексної площини
![]() можна провести пряму так, щоб перетворена
частотна характеристика
можна провести пряму так, щоб перетворена
частотна характеристика
![]() знаходилась праворуч від цієї прямої.
Дане визначення відповідає:
знаходилась праворуч від цієї прямої.
Дане визначення відповідає:
1) критерію стійкості Попова.
8.
Що визначається виразом:
 ?
?
2) Білінійне перетворення.
9. При аналізі імпульсної системи, імпульсний елемент розбивають на дві ланки (ідеальний імпульсний елемент та формуючий елемент ) у випадку якщо:
1) імпульсний елемент здійснює амплітудно імпульсну модуляцію.
10. Які розрізняють види дискретизації?
1) По рівню; по часу; по рівню і часу.
11. Ідеальний імпульсний елемент в кожний момент квантування виробляє:
1) дельта – імпульс.
12.
Характеристичне рівняння імпульсної
системи регулювання
![]() .
Визначити стійкість системи.
.
Визначити стійкість системи.
+1) Стійка.
13.
Визначити стійкість замкнутої імпульсної
системи регулювання, передаточна функція
якої:![]() .
.
2) Не стійка.
Функцію, яка в момент часу дискретизації приймає такі самі значення, що і неперервна функція, а в інші моменти часу довірнює нулю, називають:
+1) решітчастою.
15.
Імпульсна САК стійка, якщо годограф
характеристичного вектора
![]() при зміні відносної частоти від 0 до
розпочинається на додатковому напрямку
дійсної осі і проходить (проти годинникової
стрілки) послідовно 2К квадрати, де К –
порядок імпульсної САК, стверджує:
при зміні відносної частоти від 0 до
розпочинається на додатковому напрямку
дійсної осі і проходить (проти годинникової
стрілки) послідовно 2К квадрати, де К –
порядок імпульсної САК, стверджує:
2) критерій Михайлова для імпульсних систем.
16.
Якщо система стійка (нейтральна) в
розімкнутому стані, то для стійкості
замкнутої системи необхідно і достатньо,
щоб годограф АФЧХ розімкнутої імпульсної
системи при зміні відносної частоти
![]() від 0 до
не охоплював точку з координатами
(-1;j0), стверджує:
від 0 до
не охоплював точку з координатами
(-1;j0), стверджує:
3) критерій Найквіста для імпульсних систем.
17. Відхилення вихідної координати системи регулювання від заданого значення має тотожно дорівнювати нулю в разі будь-яких задавальних або збурюючих впливів, твердить:
2) принцип інваріантності
18. Розрахунок настроювань регулятора та визначення робочої частоти в одноконтурній системі регулювання; одержання передаточної функції ідеального компенсатора з умови інваріантності та аналіз його реалізованості; вибір реального компенсатора та визначення його параметрів з умови наближеної інваріантності в найістотнішому для системи діапазоні частот. Ці етапи відповідають:
1) розрахунку комбінованої частково інваріантної системи регулювання.
19.
Якщо вільна складова
![]() визначається розв’язком однорідного
різницевого рівняння імпульсної системи
визначається розв’язком однорідного
різницевого рівняння імпульсної системи
![]() ,
то з якого рівняння визначаються корені
характеристичного рівняння
,
то з якого рівняння визначаються корені
характеристичного рівняння
![]() ?
?
2)
![]() .
.
20. Завершіть загальну умову стійкості імпульсних систем.
Імпульсна система стійка, якщо вільна складова перехідного процесу x(iT) з часом прямує до 1) вимушеного значення.
2) 0.
21.
Якщо всі коефіцієнти характеристичного
рівняння (крім першого
![]() )
рівні нулю, тобто
)
рівні нулю, тобто
![]() ,
то чому дорівнює тривалість перехідного
процесу?
,
то чому дорівнює тривалість перехідного
процесу?
1) Перехідний процес закінчиться за час nT.
22. Як отримати рівняння для побудови кривої Михайлова?
1) В
характеристичний поліном замкнутої
системи
![]() підставляють
підставляють
![]() і будують годограф вектора
і будують годограф вектора
![]() .
.
23.
Згідно критерію Найквіста імпульсна
система стійка, якщо амплітудно-фазова
характеристика стійкого розімкненого
контура
![]()
2) не
охоплює точку
![]() .
.
24. За якими показниками оцінюють якість імпульсних систем?
1) Тривалість перехідного процесу, перерегулюваня, точність.
25. За якими показниками оцінюють точність імпульсної системи?
3) За усталеним значенням сигнала помилки.
17. Автоматизований електропривод
1.
Визначити момент на валу двигуна, якщо
момент сил опору виробничого механізму
![]()
![]() і він обертається зі швидкістю
і він обертається зі швидкістю
![]()
![]() .
ККД передачі
.
ККД передачі
![]() .
Момент холостого ходу і швидкість
двигуна відповідно дорівнюють
.
Момент холостого ходу і швидкість
двигуна відповідно дорівнюють
![]() і
і
![]()
![]()
4.
![]()
![]() .
.
2.
Визначити приведений до вала двигуна
момент інерції, якщо моменти інерції
двигуна
![]()
![]() ,
редуктора
,
редуктора
![]() ,
виробничого механізму
,
виробничого механізму
![]() .
Коефіцієнт передачі редуктора
.
Коефіцієнт передачі редуктора
![]() .
.
2.
0,30![]() .
.
3.
Визначити час розгону електропривода
до швидкості
![]() об/хв,
якщо приведений момент інерції
об/хв,
якщо приведений момент інерції
![]() ,
момент двигуна
,
момент двигуна
![]()
![]() і момент сил опору
і момент сил опору
![]() .
.
2.
0,72![]() .
.
4.
Визначити час гальмування електропривода
зі швидкості
об/хв,
якщо приведений момент інерції
,
гальмівний момент двигуна
![]() і момент сил опору
і момент сил опору
![]() .
.
1. 0,36 .
5.
Визначити коефіцієнт передачі двигуна
постійного струму незалежного збудження,
якщо
![]() В,
В,
![]() А,
А,
![]() Ом
і
Ом
і
![]() об/хв.
об/хв.
4.
2,98![]() .
.
6. Вказати за яким способом регулювання швидкості двигуна постійного струму незалежного збудження його потужність буде сталою.
2. Зміною струму збудження.
7. Якою ланкою представляють передавальну функцію випрямляча з імпульсно-фазовою системою керування.
3.
![]() .
.
8.
Визначити середнє значення напруги
широтно-імпульсного перетворювача,
якщо час імпульсу
![]() с,
період
с,
період
![]() с
і напруга живлення
с
і напруга живлення
![]() В.
В.
4.
![]() В.
В.
9.
Визначити критичне ковзання асинхронного
двигуна з короткозамкненим ротором,
якщо
![]() об/хв,
об/хв,
![]() .
.
3.
![]() .
.
10. Якщо напруга живлення асинхронного двигуна зменшиться на 10%, то як зміниться його момент?
3. На 19% зменшиться.
11.
Яким має бути співвідношення між напругою
і частотою при частотному регулюванні
кутової швидкості асинхронного двигуна,
якщо момент навантаження
![]() .
.
1.
![]() .
.
12.
Визначити номінальні втрати потужності
у електродвигуні, якщо він споживає
потужність
![]() кВт
і його ККД
кВт
і його ККД
![]() .
.
2. 856Вт.
13.
Визначити потужність двигуна, якщо
момент статичного опору, приведений до
вала двигуна
![]()
![]() при швидкості
об/хв.
при швидкості
об/хв.
4.
![]() кВт.
кВт.
14.
Визначити потужність самовентильованого
двигуна, який працює у повторно-короткочасному
режимі згідно наведеної навантажувальної
діаграми. Коефіцієнт погіршення
охолодження
![]() .
.
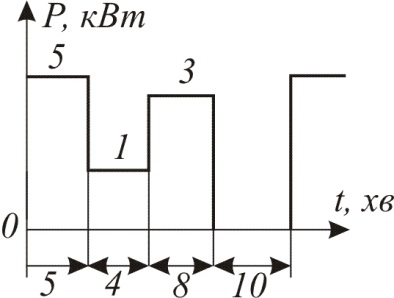
1.
![]() кВт.
кВт.
1.
![]() кВт.
кВт.
3.
![]() кВт.
кВт.
4.
![]() кВт.
кВт.
15. Кінцевий автомат (рис.1) має 3 вхідних, 2 внутрішні і 2 вихідні змінні. Скільки можливих наборів матимуть ці змінні?
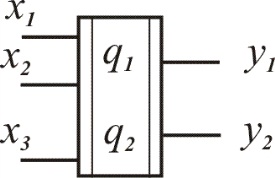
2. 8; 4; 4.
16.
Визначити спад кутової швидкості у
замкненій системі регулювання при
номінальному навантаженні, якщо
![]() ;
;
![]() ;
;
![]() об/хв.
об/хв.
3.
![]() рад/с.
рад/с.
17.
Визначити коефіцієнт передачі розімкненої
системи автоматичного регулювання
кутової швидкості, якщо
![]() рад/с;
рад/с;
![]() А;
А;
![]() Ом
і
Ом
і
![]()
![]() .
.
2.
![]() .
.
18.
Визначити коефіцієнт зворотного зв’язку
за швидкістю
![]() ,
якщо
,
якщо
![]() В,
В,
![]() об/хв,
об/хв,
![]() .
.
1.
![]()
![]() .
.
19. Яка умова вибору регулятора струму в системі підпорядкованого регулювання?
2. Щоб у контурі струму протікав технічно-оптимальний перехідний процес.
20. Яка умова вибору регулятора швидкості в системі підпорядкованого регулювання?
3. Щоб у контурі швидкості протікав технічно-оптимальний перехідний процес.
21.
Визначити модуль жорсткості лінійної
частини механічної характеристики
асинхронного двигуна, якщо
![]() ;
;
![]() ;
;
![]() об/хв
і
об/хв
і
![]() .
.
3.
![]()
![]() .
.
22. Якими ланками можна представити передавальну функцію асинхронного двигуна при частотному регулюванні швидкості (рис. 1).
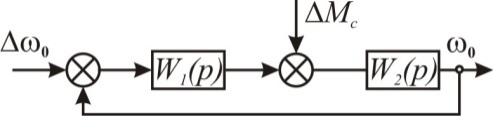
1.
![]() - інерційна ланка,
- інтегрувальна ланка.
- інерційна ланка,
- інтегрувальна ланка.
23.
Якщо приведений момент інерції привода
зменшити у два рази, то чи зміниться
втрата енергії за час пуску двигуна за
умови
![]() .
.
2. Зменшиться у два рази.
24. За якої умови керування синхронним двигуном зі збудженням від постійних магнітів споживана потужність буде мінімальною?
2.
![]() .
.
18. Системний аналіз складних систем управління
Системою називають:
1) комплекс взаємопов’язаних елементів, що утворюють цілісність.
2. Структурою системи називають:
4) стійку впорядкованість у просторі і часі елементів та зв’язків системи.
3. Емерджентністю називають таку властивість системи, яка:
2) полягає в тому, що у складної системи наявні властивості, що не можуть бути виведені з властивостей її елементів.
4. Диференціальне рівняння стану системи має наступний вигляд:
+
 = Ах + Вu
= Ах + Вu
5. Декомпозицією системи називають:
4) поділ системи на частини з метою зробити зручнішими операції з цією системою.
6. Структуру системи з підпорядкованістю, тобто з нерівноправними зв'язками називають:
1) ієрархічною.
7.
Визначте матрицю суміжності для системи,
граф якої зображений на рисунку.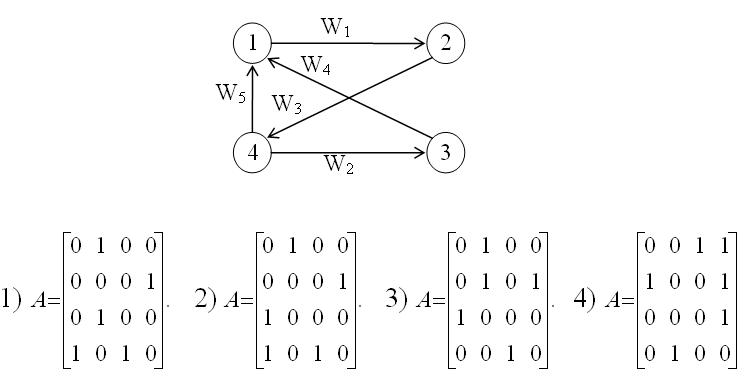
Відповідь2
8. Цілеспрямоване втручання в перебіг процесів у системі називають:
2) керуванням.
9. Підлаштування параметрів системи з метою досягнення бажаного стану системою називають:
2) параметричною адаптацією.
10. Послідовність операцій в процесі керування називають:
3) алгоритмом керування.
11. Суть аналізу системи полягає:
+3) в представленні системи у вигляді сукупності простіших компонентів.
12. Операцію об’єднання декількох елементів у єдине ціле називають:
2) агрегатуванням.
13. Моделлю системи називається:
2) реально існуюча або уявна система, яка, заміщаючи і відображаючи іншу систему-оригінал, знаходиться з нею у відношенні подібності.
14. Функціонування системи в часі шляхом моделювання елементарних явищ та обміну сигналами між її елементами відтворює:
1) імітаційна модель.
15. За допомогою мереж Петрі можна моделювати роботу:
1) дискретних асинхронних систем.
16. Запишіть маркування для мережі Петрі, зображеної на рисунку.
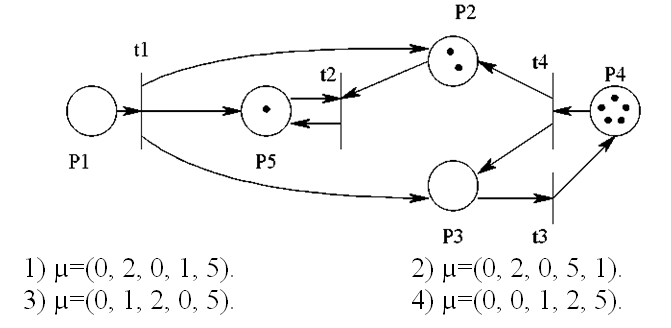
відповідь 2
17. Кількісною мірою невизначеності в системі є:
3) ентропія.
18. Метод дерева цілей орієнтований на:
1) одержання повної та відносно стійкої структури цілей, проблем, функцій, напрямків, яка мало змінюватиметься протягом певного періоду часу при змінах, що відбуваються в будь-якій системі, яка розвивається.
19. Що є першим та необхідним етапом будь-якого системного дослідження?
4) Правильне та достатньо точне формулювання проблеми.
20. Експертні системи належать до класу:
2) систем підтримки прийняття рішень.
21. Системою підтримки прийняття рішень називають
1) комп’ютерну інформаційну систему, яка використовується тоді, коли неможливе використання автоматичної системи прийняття рішень.
19. Основи проектування систем автоматизації
1. Що є підставою для проектування об'єктів автоматизації?
в) технічне завдання та вихідні дані
2. Що передбачається виконувати у технічних умовах?
б) роботи в обсягах, які необхідні для здійснення інженерного забезпечення проектованого об’єкта
3. Що таке структурна схема?
г) це - схема, яка визначає основні функціональні частини виробу (установки, системи), їх призначення і взаємодію
4. Яке призначення структурної схеми комплексу технічних засобів?
а) для відображення всіх рівнів АСУТП, крім нижнього, який подається у схемі автоматизації, а також врахування всіх її вхідних і вихідних сигналів
5. Яке призначення схеми автоматизації?
б) для відображення функціональної взаємодії всіх елементів проектованої системи автоматизації
6. У яких випадках застосовують розгорнутий спосіб розробки схем автоматизації?
а) для відносно невеликих за об’ємом об’єктів автоматизації та нескладних технологічних процесів
7. У яких випадках застосовують спрощений спосіб розробки схем автоматизації?
а) для відносно великих за об’ємом об’єктів автоматизації та складних технологічних процесів, без вказівки первинних вимірювальних перетворювачів та інших засобів
8. Яка особливість процесу вибору технічного засобу?
а) вибір технічного засобу - це процес ітеративних інженерних пошуків для задоволення відповідних вимог
9. Які основні характеристики на підставі яких здійснюється вибір контролерів при проектуванні АС?
в) процесора, периферійної частини ПЛК, каналів вводу/виводу, комунікаційні можливості, умови експлуатації, технічна підтримка, програмне забезпечення
10. Які фактори метрологічного і режимного характеру потрібно враховувати при виборі вимірювальних засобів КВПіА технологічних параметрів?
а) відстань, на яку буде передаватися інформація, значення вимірюваної величини, допустима похибка, інерційність, вплив навколишнього середовища
11. Які особливості використання мережі PROFIBUS-PA для підключення первинних вимірювальних пристроїв та вторинних вимірювальних перетворювачів?
а) може використовуватися для заміни аналогової технології 4-20мА та застосовується скручена пара, яка може одночасно використовуватися і для передачі даних
12. Який аналіз потрібно проводити при виборі типу приводу регулюючих органів?
а) порівняльний аналіз двох варіантів енергоспоживання: електричного і пневматичного
13. Що потрібно врахувати для обгрунтованого вибору SCADA-системи?
а) вимоги, які стосуються функціональних можливостей, ресурсів, зручності розробки прикладних програм та ін.
14. Яка роль надається проектувальникам АСУТП при виконанні проектів приміщень АСУТП?
а) розробляють завдання на проектування приміщень АСУТП (диспетчерські, операторські, допоміжні, службові та ін.)
15. Як за призначенням поділяються типові монтажні креслення?
б) типові монтажні креслення (ТМ), креслення типових конструкцій (ТК) і креслення заставних конструкцій (ЗК)
16. Яка відмінність між пусконалагоджувальними та налагоджувальними роботами?
а) вони мають однаковий технічний зміст але відрізняються в організаційних моментах, таких як планування, фінансування, оформлення документації
17. Що є підставою для проектування об'єктів автоматизації?
в) технічне завдання та вихідні дані
18. Яку інформацію повинен містити підсумковий єдиний протокол випробувань АСУТП?
а) висновок про відповідність системи вимогам технічного завдання на створення АСУТП, і можливості оформлення Акту приймання АСУТП у постійну експлуатацію