

3.2. Выбор типа регулятора температуры
3.2.1. Общие сведения о методах расчета настроек непрерывного регулятора в одноконтурной системе
Регулятор как устройство управления в системе управления должен обеспечить необходимые свойства этой системы с учетом поведения объекта, т.е. обеспечить устойчивость системы и выполнение определенных требований по качеству управления как в установившемся, так и в динамическом режимах.
Процесс проектирования регулятора может проходить различными способами. Это могут быть эмпирические методы, основанные на измерениях, выполненных на реальном объекте. В этом случае объект должен иметь достаточно простую модель в виде апериодического звена с запаздыванием, т.е. допускать аппроксимацию вида (3.2) [14, 15]:
 ,
(3.1)
,
(3.1)
где
 –
коэффициент усиления апериодического
звена;
–
коэффициент усиления апериодического
звена;
 – время запаздывания,
с;
– время запаздывания,
с;
 – постоянная
времени звена, с.
– постоянная
времени звена, с.
К таким методам относятся метод колебаний Зиглера – Никольса, метод Зиглера – Никольса на основе критерия Найквиста, методы, позволяющие провести расчет настроек регулятора по известной кривой отклика.
Кроме эмпирических методов настройки регуляторов могут быть найдены на основе аналитических или графо – аналитических методов. В данной работе настройку регулятора произведем методом ограничения на частотный показатель колебательности (графо-аналитический метод) [16].
3.2.2. Получение характеристик по кривой отклика
Для получения характеристик объекта по кривой отклика:
строится касательная с наибольшим углом наклона;
определяется время t2 пересечения этой касательной линии х1;
вычисляются параметры:
 ,
(3.2)
,
(3.2)
 ,
(3.3)
,
(3.3)
 ,
(3.4)
,
(3.4)
где
 – значение управляющего воздействия
входной величины;
– значение управляющего воздействия
входной величины;
 – исходное значение
входной величины;
– исходное значение
входной величины;
 – значение
нового установившегося значения выходной
– значение
нового установившегося значения выходной
величины;
 – исходное
установившиеся значение выходной
величины;
– исходное
установившиеся значение выходной
величины;
 – момент времени
приложения воздействия U1;
– момент времени
приложения воздействия U1;
 – момент времени,
в который выходная величина начинает
– момент времени,
в который выходная величина начинает
отслеживать изменение управления, приложенное в момент
( );
);
 – значение времени,
при котором касательная пересекает
– значение времени,
при котором касательная пересекает
линию установившегося значения (рис. 3.2).
Замечание. В формуле
(3.3) коэффициент передачи
 вычислен в абсолютных единицах, он может
быть вычислен в безразмерном виде:
вычислен в абсолютных единицах, он может
быть вычислен в безразмерном виде:
 ,
(3.5)
,
(3.5)
3.2.3. Расчет передаточной функции объекта по кривой отклика
Определяются параметры , , по кривой отклика.
Переходная характеристика нагрева жидкости в трубопроводе приведена на рис. 3.5.
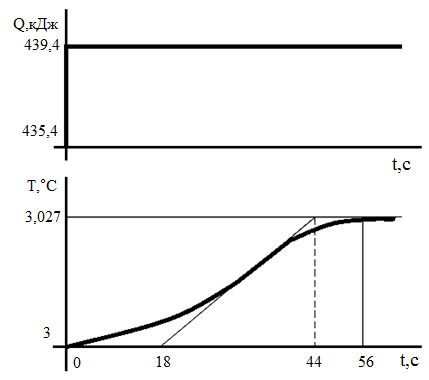
Рис. 3.2. График переходной характеристики нагрева жидкости в трубопроводе
Переходная характеристика представляет собой реакцию системы на единичное воздействие. Запасенное количество теплоты жидкостью до включения системы электрического обогрева составляла 435,4 кДж. После включения электрического обогрева нагревательный элемент передаст потоку жидкости 71,3∙56=4 Дж, таким образом, запасенное количество теплоты жидкостью составит:
 кДж.
кДж.
Определим
характеристики
 (время начала движения x(t)),
(время начала движения x(t)),
 ,
,
 .
.
По формуле (3.6) определяется коэффициент передачи:
 ;
;
 ;
;
 .
.
Тогда передаточная функция имеет вид:
 ,
(3.6)
,
(3.6)
Находится соотношение
величин
 ,
а затем по табл. 3.3. определяется тип
регулятора:
,
а затем по табл. 3.3. определяется тип
регулятора:
 .
.
Таблица 3.3
Перечень типов регулятора в зависимости от величины
|
||
0-0,2 |
0,2-0,7 |
0,7< |
П |
ПИ |
ПИД |
Таким образом, согласно табл. 3.3 выбирается ПИ-регулятор. Дальнейший расчет настроек непрерывного ПИ-регулятора произведем методом ограничения на частотный показатель колебательности. Этот метод позволяет получить точные настройки ПИ-регулятора.