

1.4 Розрахунок оптимальних параметрів налаштування регулятора
Для вибору параметрів налаштування регулятора запишемо передавальну функцію розімкненої системи:
![]() (1.4)
(1.4)
![]() (1.5)
(1.5)
Виходячи з того, що дана САК містить астатичну ланку першого порядку, виберемо ПД – регулятор, що не вносить в систему астатизму і збільшить швидкодією, скомпенсувавши тим самим велику інертність АСК .
Використовуємо ПП «MATLAB» для вирішення задачі вибору параметрів налаштування регулятора
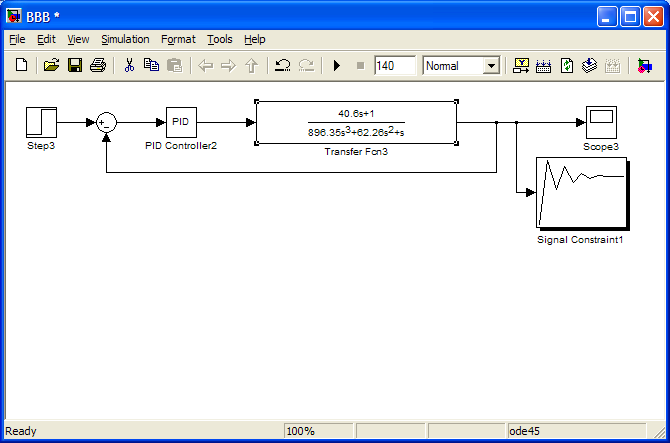
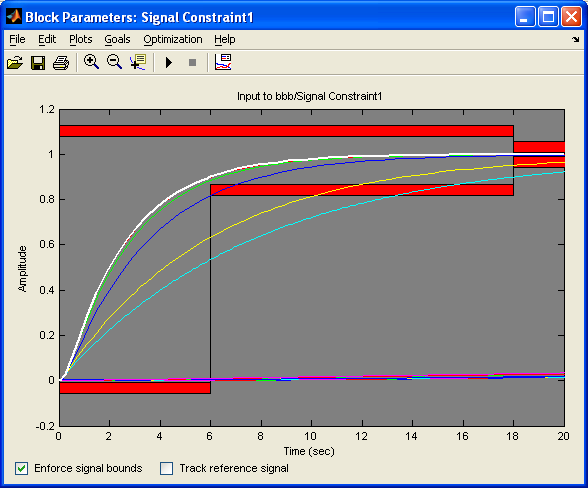

Рис. 1.4 – розрахунок параметрів налаштування регулятора методом параметричної оптимізації з використанням ПП «MATLAB»
В загальному випадку функція передачі ПД-регулятора:
![]() (1.6)
(1.6)
Для нашого випадку він матиме вигляд:
![]() (1.7)
(1.7)
Визначимо загальну передавальну функцію розімкнутої системи
![]() (1.8)
(1.8)
![]() (1.9)
(1.9)
1.5 Оцінка точності системи
Призначення
будь-якої автоматичної системи управління
– зміна вихідної величини
![]() у відповідності із зміною задаючого
впливу
у відповідності із зміною задаючого
впливу
![]() .
В більшості випадків це завдання системи
полягає в підтриманні рівності
.
В більшості випадків це завдання системи
полягає в підтриманні рівності
![]() при будь-яких змінах задаючого і
збурюючого впливів.
при будь-яких змінах задаючого і
збурюючого впливів.
При аналізі точності розрізняють дві функції системи:
відтворення задаючого впливу;
компенсація збурюючих впливів.
Через інерційність об’єкта і регулятора обидві ці функції виконуються будь-якою реальною системою з похибкою:
![]() .
(1.10)
.
(1.10)
Сигнал помилки можна розглядіти як суму двох складових:
![]() .
(1.11)
.
(1.11)
де
![]() - складова сигналу помилки, що характеризує
точність відтворення з
- складова сигналу помилки, що характеризує
точність відтворення з
задаючого впливу;
![]() -
складова сигналу помилки, що показує
точність компенсації збурюючих впливів.
-
складова сигналу помилки, що показує
точність компенсації збурюючих впливів.
Розрізняють статичну і динамічну точності.
Статичну похибку оцінюють лише для статичних систем, в астатичній системі вона рівна нулю.
Для оцінки динамічної похибки скористаємось передавальною функцією розімкнутого контура (1.9)
![]()
Згідно
умови маємо вплив виду
![]() ,
де
,
де
![]() .
.
Тоді згідно загального правила визначення похибко маємо. Порядок астатизму регулятора рівний одиниці. Порядок астатизму САК рівний 2.
Тобто
![]() (
(![]() ).
Отже:
).
Отже:
![]() ;
;
![]() .
.
Як бачимо дана астатична САК 3-го порядку має не значну похибку на заданий вплив, і так як головним впливом є функція Хевісайда, то корекцію в систему вводити недоцільно.
1.6 Перевірка стійкості автоматичної системи керування
Однією з найважливіших характеристик автоматичної системи керування поряд з точністю є стійкість. Причому, якщо показники точності визначають степінь корисності і ефективності системи, то від стійкості залежить її працездатність.
Відповідно до завдання на курсову роботу, дослідимо стійкість системи за критеріями: Гурвіца і Михайлова.