

Билет 1.
Механическим движением называют изменение положения тела (или его частей) относительно других тел. Например, человек, едущий на эскалаторе в метро, находится в покое относительно самого эскалатора и перемещается относительно стен туннеля; гора Эльбрус находится в покое относительно Земли и движется вместе с Землей относительно Солнца.
Из этих примеров видно, что всегда надо указать тело, относительно которого рассматривается движение, его называют телом отсчета. Система координат, тело отсчета, с которым она связана, и выбранный способ измерения времени образуют систему отсчета.
Положение
тела задается координатой.
Рассмотрим два примера. Размеры
орбитальной станции, находящейся на
орбите около Земли, можно не учитывать,
а рассчитывая траекторию движения
космического корабля при стыковке со
станцией, без учета ее размеров не
обойтись. Таким образом, иногда размерами
те-ла по сравнению с расстоянием до него
можно пренебречь, в этих случаях тело
считают материальной точкой. Линию,
вдоль которой движется материальная
точка, называют траекторией.
Длину траектории называют путем (![]() ).
Единица пути — метр (м).
).
Единица пути — метр (м).
Механическое движение характеризуется тремя физическими величинами: перемещением, скоростью и ускорением.
Направленный
отрезок прямой, проведенный из начального
положения движущейся точки в ее конечное
положение, называется перемещением
(![]() ).
Перемещение — величина векторная.
Единица перемещении метр (м).
).
Перемещение — величина векторная.
Единица перемещении метр (м).
Скорость —
векторная физическая величина,
характеризующая быстроту перемещения
тела, численно равная отношению
перемещения за малый промежуток времени
к величине этого промежутка. Промежуток
времени считается достаточно малым,
если скорость при неравномерном движении
в течение этого промежутка не менялась.
Определяющая формула скорости имеет
вид ![]() .
Единица скорости — м/с. На практике
используют единицу измерения скорости
км/ч (36 км/ч = 10 м/с). Измеряют скорость
спидометром.
.
Единица скорости — м/с. На практике
используют единицу измерения скорости
км/ч (36 км/ч = 10 м/с). Измеряют скорость
спидометром.
Ускорение —
векторная физическая величина,
характеризующая быстроту изменения
скорости, численно равная отношению
изменения скорости к промежутку времени,
в течение которого это изменение
произошло. Если скорость изменяется
одинаково в течение всего времени
движения, то ускорение можно рассчитать
по формуле ![]() .
Единица ускорения м/с2.
.
Единица ускорения м/с2.
Характеристики механического движения связаны между собой основными кинематическими уравнениями:
![]() ;
; ![]()
Предположим, что тело движется без ускорения (самолет на маршруте), его скорость в течение продолжительного времени не меняется, а = 0, тогда кинематические уравнения будут иметь вид:
![]() ,
, ![]()
Движение, при котором скорость тела не меняется, т. е. тело за любые равные промежутки времени перемещается на одну и ту же величину, называют равномерным прямолинейным движением.
Во
время старта скорость ракеты быстро
возрастает, т. е. ускорение ![]() .
.
В этом случае кинематические уравнения выглядят так:
![]()
При таком движении скорость и ускорение имеют одинаковые направления, причем скорость изменяется одинаково за любые равные промежутки времени. Этот вид движения называют равноускоренным.
При торможении автомобиля скорость уменьшается одинаково за любые равные промежутки времени, ускорение направлено в сторону, противоположную движению; так как скорость уменьшается, то уравнения принимают вид:
![]() .
.
Такое движение называют равнозамедленным.
Все физические величины, характеризующие движение тела (скорость, ускорение, перемещение), а также вид траектории, могут изменяться при переходе из одной системы к другой, т. е. характер дви¬жения зависит от выбора системы отсчета, в этом и проявляетсяотносительность движения. Например, в воздухе происходит дозаправка самолета топливом. В системе отсчета, связанной с самолетом, другой самолет находится в покое, а в системе отсчета, связанной с Землей, оба самолета находятся в движении. При движении велосипедиста точка колеса в системе отсчета, связанной с осью, имеет траекторию, представленную на рисунке 1.
В системе отсчета, связанной с Землей, вид траектории оказывается другим (рис. 2).
Билет 2.
Простые наблюдения и опыты, например с тележками (рис. 3), приводят к следующим качественным заключениям: а) тело, на которое другие тела не действуют, сохраняет свою скорость неизменной; б) ускорение тела возникает под действием других тел, но зависит и от самого тела; в) действия тел друг на друга всегда носят характер взаимодействия. Эти выводы подтверждаются при наблюдении явлений в природе, технике, космическом пространстве только в инерциальных системах отсчета.
Взаимодействия отличаются друг от друга и количественно, и качественно. Например, ясно, что чем больше деформируется пружина, тем больше взаимодействие ее витков. Или чем ближе два одноименных заряда, тем сильнее они будут притягиваться. В простейших случаях взаимодействия количественной характеристикой является сила. Сила — причина ускорения тел (в инерциальной системе отсчета). Сила — это векторная физическая величина, являющаяся мерой ускорения, приобретаемого телами при взаимодействии. Сила характеризуется: а) модулем; б) точкой приложения; в) направлением.
Единица силы — ньютон (Н). 1 ньютон — это сила, которая телу массой 1 кг сообщает ускорение 1 м/с2 в направлении действия этой силы, если другие тела на него не действуют. Равнодействующей нескольких сил называют силу, действие которой эквивалентно действию тех сил, которые она заменяет. Равнодействующая является векторной суммой всех сил, приложенных к телу:
![]()
Качественно
по своим свойствам взаимодействия также
различны. Например, электрическое и
магнитное взаимодействия связаны с
наличием зарядов у частиц либо с движением
заряженных частиц. Наиболее просто
рассчитать силы в электродинамике: сила
Ампера — ![]() ,
сила Лоренца —
,
сила Лоренца — ![]() ,
кулоновская сила —
,
кулоновская сила — ![]() и
гравитационные си-лы: закон всемирного
тяготения —
и
гравитационные си-лы: закон всемирного
тяготения — ![]() .
Такие механические силы, как сила
упругости и сила трения, возникают в
результате электромагнитного
взаимодействия частиц вещества. Для их
расчета необходимо использовать
формулы:
.
Такие механические силы, как сила
упругости и сила трения, возникают в
результате электромагнитного
взаимодействия частиц вещества. Для их
расчета необходимо использовать
формулы: ![]() (закон
Гука),
(закон
Гука), ![]() —
сила трения.
—
сила трения.
На основании обобщения огромного числа опытных фактов и наблюдений были сформулированы законы динамики. Такое обобщение было выполнено Исааком Ньютоном.
Первый закон Ньютона постулирует существова-ние инерционных систем отсчета и дает признак, пользуясь которым такие системы можно выделить из всего разнообразия систем отсчета: существуют такие системы отсчета, относительно которых посту¬пательно движущееся тело сохраняет свою скорость постоянной, если на него не действуют другие тела (или действия других тел компенсируются).
Второй закон Ньютона отражает фундаменталь¬ное свойство материального мира, в соответствии с которым относительно инерциальных систем отсчета ускорение тел возникает только под действием сил. Этот закон формулируется следующим образом.
Ускорение, с которым движется тело, прямо пропорционально равнодействующей всех сил, дей-ствующих на тело, обратно пропорционально его массе и направлено так же, как и равнодействую¬щая сила:

Часто
основной закон динамики записывают в
виде ![]() ,
что дает универсальный способ определения
любых сил на основе кинематических
методов измерения ускорения.
,
что дает универсальный способ определения
любых сил на основе кинематических
методов измерения ускорения.
Третий закон Ньютона является обобщением громадного количества опытных фактов, показывающих, что силы — результат взаимодействия тел. Он формулируется следующим образом: тела действуют друг на друга с силами, равными по модулю и противоположными по направлению.
Билет 3.
Простые наблюдения и опыты доказывают, что покой и движение относительны, скорость тела зависит от выбора системы отсчета; по второму закону Ньютона независимо от того, находилось ли тело в покое или двигалось, изменение скорости его движения может происходить только под действием силы, т. е. в результате взаимодействия с другими телами. Однако существуют величины, которые могут сохраняться при взаимодействии тел. Такими величинами являются энергия и импульс.
Импульсом
тела называют
векторную физиче¬скую величину,
являющуюся количественной характеристикой
поступательного движения тел. Импульс
обозначается ![]() .
Импульс тела равен произведению массы
тела на его скорость:
.
Импульс тела равен произведению массы
тела на его скорость: ![]() .
Направление вектора импульса р совпадает
с направлением вектора скорости тела
.
Направление вектора импульса р совпадает
с направлением вектора скорости тела ![]() .
Единица импульса —
.
Единица импульса — ![]() .
.
Для
импульса системы тел выполняется закон
сохранения, который справедлив только
для замкнутых физических систем. В общем
случае замкнутой называют систему,
которая не обменивается энергией и
массой с телами и полями, не входящими
в нее. В механикезамкнутой называют
систему, на которую не действуют внешние
силы или действие этих сил скомпенсировано.
В этом случае ![]() ,
где
,
где ![]() —
начальный импульс системы, а
—
начальный импульс системы, а ![]() —
конечный. В случае двух тел, входящих в
систему, это выражение имеет вид
—
конечный. В случае двух тел, входящих в
систему, это выражение имеет вид ![]() ,
где
,
где ![]() —
массы тел, а
—
массы тел, а ![]() —
скорости до взаимодействия,
—
скорости до взаимодействия, ![]() —
скорости после взаимодействия (рис. 4).
Эта формула и является математическим
выражением закона сохранения
импульса: импульс
замкнутой физической системы сохраняется
при любых взаимодействиях, происходящих
внутри этой системы. Другими словами: в
замкнутой физической системе геометрическая
сумма импульсов тел до взаимодействия
равна геометрической сумме импульсов
этих тел после взаимодействия.
В случае незамкнутой системы импульс
тел системы не сохраняется. Однако если
и системе существует направление, по
которому внешние силы не действуют или
их действие скомпенсировано, то
сохраняется проекция импульса на это
направление. Кроме того, если время
взаимодействия мало (выстрел, взрыв,
удар), то за это время даже в случае
незамкнутой системы внешние силы
незначительно изменяют импульсы
взаимодействующих тел. Поэтому для
практических расчетов в этом случае
тоже можно применять закон сохранения
импульса.
—
скорости после взаимодействия (рис. 4).
Эта формула и является математическим
выражением закона сохранения
импульса: импульс
замкнутой физической системы сохраняется
при любых взаимодействиях, происходящих
внутри этой системы. Другими словами: в
замкнутой физической системе геометрическая
сумма импульсов тел до взаимодействия
равна геометрической сумме импульсов
этих тел после взаимодействия.
В случае незамкнутой системы импульс
тел системы не сохраняется. Однако если
и системе существует направление, по
которому внешние силы не действуют или
их действие скомпенсировано, то
сохраняется проекция импульса на это
направление. Кроме того, если время
взаимодействия мало (выстрел, взрыв,
удар), то за это время даже в случае
незамкнутой системы внешние силы
незначительно изменяют импульсы
взаимодействующих тел. Поэтому для
практических расчетов в этом случае
тоже можно применять закон сохранения
импульса.

Экспериментальные исследования взаимодействий различных тел — от планет и звезд до атомов и элементарных частиц — показали, что в любой системе взаимодействующих тел при отсутствии действия со стороны других тел, не входящих в систему, или равенстве нулю суммы действующих сил геометрическая сумма импульсов тел действительно остается неизменной.
В
механике закон сохранения импульса и
законы Ньютона связаны между собой.
Если на тело массой ![]() в
течение времени
в
течение времени ![]() действует
сила и скорость его движения изменяется
от
действует
сила и скорость его движения изменяется
от ![]() до
,
то ускорение движения а тела равно
.
На основании второго закона Ньютона
для силы
до
,
то ускорение движения а тела равно
.
На основании второго закона Ньютона
для силы ![]() можно
записать
можно
записать ![]() ,
отсюда следует
,
отсюда следует
![]() .
.
![]() —
векторная
физическая величина, характеризующая
действие на тело силы за некоторый
промежуток времени и равная произведению
силы на время ее действия, называетсяимпульсом
силы.
Единица импульса силы —
—
векторная
физическая величина, характеризующая
действие на тело силы за некоторый
промежуток времени и равная произведению
силы на время ее действия, называетсяимпульсом
силы.
Единица импульса силы — ![]() .
.
Закон сохранения импульса лежит в основе реактивного движения. Реактивное движение — это такое движение тела, которое возникает после отделения от тела его части.
Пусть
тело массой
покоилось.
От тела отделилась какая-то его часть
массой ![]() со
скоростью
со
скоростью ![]() Тогда
оставшаяся часть придет в движение в
противоположную сторону со скоростью
Тогда
оставшаяся часть придет в движение в
противоположную сторону со скоростью ![]() ,
масса оставшейся части
,
масса оставшейся части ![]() .
Действительно, сумма импульсов обеих
частей тела до отделения была равна
нулю и после разделения будет равна
нулю:
.
Действительно, сумма импульсов обеих
частей тела до отделения была равна
нулю и после разделения будет равна
нулю:
![]() ,
отсюда
,
отсюда ![]() .
.
Большая заслуга в развитии теории реактивного движения принадлежит К. Э. Циолковскому.
Он разработал теорию полета тела переменной массы (ракеты) в однородном поле тяготения и рассчитал запасы топлива, необходимые для преодоления силы земного притяжения; основы теории жид¬костного реактивного двигателя, а также элементы его конструкции; теорию многоступенчатых ракет, причем предложил два варианта: параллельный (несколько реактивных двигателей работают одновременно) и последовательный (реактивные двигатели работают друг за другом). К. Э. Циолковский строго научно доказал возможность полета в космос с помощью ракет с жидкостным реактивным двигателем, предложил специальные траектории посадки космических аппаратов на Землю, выдвинул идею создания межпланетных орбитальных станций и подробно рассмотрел условия жизни и жизнеобеспечения на них. Технические идеи Циолковского находят применение при создании современной ракетно-космической техники. Движение с помощью реактивной струи по закону сохранения импульса лежит в основе гидрореактивного двигателя. В основе движения многих морских моллюсков (осьминогов, медуз, кальмаров, каракатиц) также лежит реактивный принцип.
Билет4.
Исаак
Ньютон выдвинул предположение, что
между любыми телами в природе существуют
силы взаимного притяжения. Эти силы
называют силами
гравитации или силами
всемирного тяготения.
Сила несмирного тяготения проявляется
в космосе, Солнечной системе и на Земле.
Ньютон обобщил законы движения небесных
тел и выяснил, что сила ![]() равна:
равна:
![]() ,
,
где
и
-
массы взаимодействующих тел, ![]() —
расстояние между ними,
—
расстояние между ними, ![]() —
коэффициент пропорциональности, который
называется гравитационной постоянной.
Численное значение гравитационной
постоянной опытным путем определил
Кавендиш, измеряя силу взаимодействия
между свинцовыми шарами. В результате
закон всемирного тяготения звучит
так: между
любыми материальными точками существует
сила взаимного притяжения, прямо
пропорциональная произведению их масс
и обратно пропорциональная квадрату
расстояния между ними, действующая по
линии, соединяющей эти точки.
—
коэффициент пропорциональности, который
называется гравитационной постоянной.
Численное значение гравитационной
постоянной опытным путем определил
Кавендиш, измеряя силу взаимодействия
между свинцовыми шарами. В результате
закон всемирного тяготения звучит
так: между
любыми материальными точками существует
сила взаимного притяжения, прямо
пропорциональная произведению их масс
и обратно пропорциональная квадрату
расстояния между ними, действующая по
линии, соединяющей эти точки.
Физический
смысл гравитационной постоянной вытекает
из закона всемирного тяготения. Если
[Unparseable or potentially dangerous latex formula. Error 3 ],
[Unparseable or potentially dangerous latex formula. Error
3 ], то ![]() ,
т. е. гравитационная постоянная равна
силе, с которой притягиваются два тела
по 1 кг на расстоянии 1 м. Численное
значение:
,
т. е. гравитационная постоянная равна
силе, с которой притягиваются два тела
по 1 кг на расстоянии 1 м. Численное
значение: ![]() .
Силы всемирного тяготения действуют
между любыми телами в природе, но
ощутимыми они становятся при больших
массах (или если хотя бы масса одного
из тел велика). Закон же всемирного
тяготения выполняется только для
материальных точек и шаров (в этом случае
за расстояние принимается расстояние
между центрами шаров).
.
Силы всемирного тяготения действуют
между любыми телами в природе, но
ощутимыми они становятся при больших
массах (или если хотя бы масса одного
из тел велика). Закон же всемирного
тяготения выполняется только для
материальных точек и шаров (в этом случае
за расстояние принимается расстояние
между центрами шаров).
Частным
видом силы всемирного тяготения
является сила
притяжения тел к Земле (или к другой
планете). Эту силу называют силой
тяжести.
Под действием этой силы все тела
приобретают ускорение свбодного падения.
В соответствии со вторым законом
Ньютона ![]() ,
следовательно,
,
следовательно, ![]() .
Сила тяжести всегда направлена к центру
Земли. В зависимости от высоты
.
Сила тяжести всегда направлена к центру
Земли. В зависимости от высоты ![]() над
поверхностью Земли и географической
широты положения тела ускорение
свободного падения приобретает различные
значения. На поверхности Земли и в
средних широтах ускорение свободного
падения равно [Unparseable or potentially dangerous latex
formula. Error 3 ].
над
поверхностью Земли и географической
широты положения тела ускорение
свободного падения приобретает различные
значения. На поверхности Земли и в
средних широтах ускорение свободного
падения равно [Unparseable or potentially dangerous latex
formula. Error 3 ].
В технике и быту широко используется понятие веса тела. Весом тела называют силу, с которой тело давит на опору или подвес в результате гравитационного притяжения к планете (рис. 5). Вес тела обозначается [Unparseable or potentially dangerous latex formula. Error 3 ]. Единица веса — ньютон (Н). Так как вес равен силе, с которой тело действует на опору, то в соответствии с третьим законом Ньютона по величине вес тела равен силе реакции опоры. Поэтому, чтобы найти вес тела, необходимо определить, чему равна сила реакции опоры.
Рассмотрим случай, когда тело вместе с опорой не движется. В этом случае сила реакции опоры, а следовательно, и нее тела равен силе тяжести (рис. 6):
[Unparseable or potentially dangerous latex formula. Error 3 ].
В
случае движения тела вертикально вверх
вместе с опорой с ускорением по второму
закону Ньютона можно записать ![]() (рис.
7, а).
(рис.
7, а).
В
проекции на ось ![]() :
: ![]() ,
отсюда
,
отсюда ![]() .
.
Следовательно,
при движении вертикально вверх с
ускорением вес тела увеличивается и
находится по формуле ![]() .
.
Увеличение веса тела, вызванное ускоренным движением опоры или подвеса, называютперегрузкой. Действие перегрузки испытывают на себе космонавты как при взлете космической ракеты, так и при торможении корабля при входе в плотные слои атмосферы. Испытывают перегрузки и летчики при вы-полнении фигур высшего пилотажа, и водители автомобилей при резком торможении.
Если
тело движется вниз по вертикали, то с
помощью аналогичных рассуждений
получаем ![]() ;
m g - N = m a [/tex];
;
m g - N = m a [/tex]; ![]() ;
; ![]() ,
т. е. вес при движении по вертикали с
ускорением будет меньше силы тяжести
(рис. 7, б).
,
т. е. вес при движении по вертикали с
ускорением будет меньше силы тяжести
(рис. 7, б).
Если тело свободно падает, то в этом случае [Unparseable or potentially dangerous latex formula. Error 3 ].
Состояние тела, в котором его вес равен нулю, называют невесомостью. Состояние невесомости наблюдается в самолете или космическом корабле при движении с ускорением свободного падения независимо от направления и значения скорости их движения. За пределами земной атмосферы при выключении реактивных двигателей на космический корабль действует только сила всемирного тяготения. Под действием этой силы космический корабль и все тела, находящиеся в нем, движутся с одинаковым ускорением, по¬этому в корабле наблюдается состояние невесомости.
5 билет.
Сила трения скольжения — силы, возникающие между соприкасающимися телами при их относительном движении. Если между телами отсутствует жидкая или газообразная прослойка (смазка), то такое трение называется сухим. В противном случае, трение называется «жидким». Характерной отличительной чертой сухого трения является наличие трения покоя.
Опытным
путём установлено, что сила трения
зависит от силы давления тел друг на
друга (силы
реакции опоры),
от материалов трущихся поверхностей,
от скорости относительного движения
и не зависит
от площади соприкосновения. Это можно
объяснить тем, что никакое тело не
является абсолютно ровным. Поэтому
истинная площадь соприкосновения
гораздо меньше наблюдаемой. Кроме того,
увеличивая площадь, мы уменьшаем удельное
давление тел друг на друга. Величина,
характеризующая трущиеся поверхности,
называется коэффициентом
трения,
и обозначается чаще всего латинской
буквой ![]() или
греческой буквой
или
греческой буквой ![]() .
Она зависит от природы и качества
обработки трущихся поверхностей. Кроме
того, коэффициент трения зависит от
скорости. Впрочем, чаще всего эта
зависимость выражена слабо, и если
большая точность измерений не требуется,
то
можно
считать постоянным.
.
Она зависит от природы и качества
обработки трущихся поверхностей. Кроме
того, коэффициент трения зависит от
скорости. Впрочем, чаще всего эта
зависимость выражена слабо, и если
большая точность измерений не требуется,
то
можно
считать постоянным.
В первом приближении величина силы трения скольжения может быть рассчитана по формуле:
![]() ,
где
,
где
— коэффициент трения скольжения,
![]() — сила
нормальной реакции опоры.
— сила
нормальной реакции опоры.
Си́ла упру́гости — сила, возникающая в теле в результате его деформации и стремящаяся вернуть тело в исходное положение.
В случае упругих деформаций является потенциальной. Сила упругости имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. В простейшем случае растяжения/сжатия тела сила упругости направлена противоположно смещению частиц тела, перпендикулярно поверхности.
Вектор силы противоположен направлению деформации тела (смещению его молекул). Если исчезает деформация тела, то исчезает и сила упругости.
В Международной системе единиц (СИ) сила упругости так же, как и все другие силы, измеряется в ньютонах (русское обозначение: Н; международное: N).
Закон Гука[править | править исходный текст]
Основная статья: Закон Гука
В простейшем случае одномерных малых упругих деформаций формула для силы упругости имеет вид:
![]() ,
,
где
—
жёсткость тела, ![]() —
величина деформации .
—
величина деформации .
Жесткость тела зависит от формы и размеров, а также от материала, из которого оно изготовлено.
Билет 6.
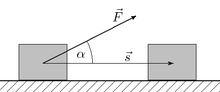
Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек), тела или системы[1].
Работа силы (сил) над одной точкой[править | править исходный текст]
Работа нескольких сил определяется естественным образом как работа их равнодействующей (их векторной суммы). Поэтому дальше будем говорить об одной силе.
![]()
При прямолинейном движении одной материальной точки и постоянном значении приложенной к ней силы работа (этой силы) равна произведению величины проекции вектора силы на направление движения и величины совершённого перемещения[3]:
![]()
Здесь
точкой обозначено скалярное
произведение[4], ![]() — вектор
перемещения;
подразумевается, что действующая
сила
— вектор
перемещения;
подразумевается, что действующая
сила ![]() постоянна
в течение всего того времени, за которое
вычисляется работа.
постоянна
в течение всего того времени, за которое
вычисляется работа.
Если сила не постоянна, то в этом случае она вычисляется как интеграл[5]:
![]()
(подразумевается
суммирование по кривой, которая является
пределом ломаной, составленной из
последовательных перемещений ![]() если
вначале считать их конечными, а потом
устремить длину каждого к нулю).
если
вначале считать их конечными, а потом
устремить длину каждого к нулю).
Если существует зависимость силы от координат[6], интеграл определяется[7] следующим образом:
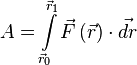 ,
,
где ![]() и
и ![]() — радиус-векторы начального
и конечного положения тела соответственно.
— радиус-векторы начального
и конечного положения тела соответственно.
Следствие: если направление движения тела ортогонально силе, работа (этой силы) равна нулю.
Работа силы (сил) над системой или неточечным телом[править | править исходный текст]
Работа сил над системой материальных точек определяется как сумма работ этих сил над каждой точкой (работы, совершённые над каждой точкой системы, суммируются в суммарную работу этих сил над системой).
Даже если изначально тело не является системой дискретных точек, можно разбить его (мысленно) на множество бесконечно малых элементов (кусочков), каждый из которых считать материальной точкой, вычисляя работу в соответствии с определением выше. В этом случае дискретная сумма заменяется на интеграл.
Эти определения могут быть использованы как для конкретной силы или класса сил — для вычисления именно их работы отдельно, так и для вычисления полной работы, совершаемой всеми силами, действующими на систему.
Кинетическая энергия[править | править исходный текст]
Кинетическая энергия вводится в механике в прямой связи с понятием работы.
Схема рассуждений такова: 1) попробуем записать работу, совершаемую всеми силами, действующими на материальную точку и, пользуясь вторым законом Ньютона (позволяющим выразить силу через ускорение), попытаться выразить ответ только через кинематические величины, 2) убедившись, что это удалось, и что этот ответ зависит только от начального и конечного состояния движения, введём новую физическую величину, через которую эта работа будет просто выражаться (это и будет кинетическая энергия).
Если ![]() —
полная работа, совершённая над частицей,
определяемая как сумма работ совершенных
приложенными к частице силами, то она
выражается как:
—
полная работа, совершённая над частицей,
определяемая как сумма работ совершенных
приложенными к частице силами, то она
выражается как:
где ![]() называется кинетической
энергией.
Для материальной точки, кинетическая
энергия определяется как работа силы,
ускорившей точку от нулевой скорости
до величины скорости
называется кинетической
энергией.
Для материальной точки, кинетическая
энергия определяется как работа силы,
ускорившей точку от нулевой скорости
до величины скорости ![]() и
выражается как:
и
выражается как:
![]()
Для сложных объектов, состоящих из множества частиц, кинетическая энергия тела равна сумме кинетических энергий частиц.
Потенциальная энергия[править | править исходный текст]
Сила
называется потенциальной,
если существует скалярная функция
координат, известная как потенциальная
энергия и
обозначаемая ![]() ,
такая что
,
такая что
![]()
Если все силы, действующие на частицу консервативны, и является полной потенциальной энергией, полученной суммированием потенциальных энергий соответствующих каждой силе, тогда:
-
 .
.
Этот результат известен как закон сохранения механической энергии и утверждает, что полная механическая энергия в замкнутой системе, в которой действуют консервативные силы,
![]()
является постоянной во времени. Этот закон широко используется при решении задач классической механики.