

Пропорционально-интегральное регулирование.
Пропорционально-интегральное (изодромное) регулирование
При изодромном регулировании осуществляется регулирование по пропорциональному и интегральному принципам, т.е.
u(t)=K1 (t) + K2 (t) dt
Следовательно, изодромное регулирование призвано совместить высокую статическую точность интегрального регулирования с большим быстродействием пропорционального регулирования.
Часто уравнение ПИ-регулятора записывается в следующем виде
u(t)= Кп [ + (1/ Ти) (t) dt ],
где Ки - коэффициент пропорциональности ПИ-регулятора, а Tи - время изодрома или время удвоения.
Последнему выражению соответствует следующая передаточная функция регулятора
Wпи(p)= 
Такая передаточная функция в самом простом варианте может быть реализована на базе интегрального операционного усилителя в виде схемы (рис. 10.5)

Рис. 10.5.
Здесь: Tи = R2 C, сек и Kи= R2/R1
Следовательно, логарифмические амплитудно- и фазочастотные характеристики можно изобразить в виде рис.10.6

Рис. 10.6.
Поскольку ПИ-регулятор можно представить в виде параллельно включенных П-регулятора с коэффициентом передачи Kп и И-регулятора с коэффициентом передачи Kп/Ти, реакция такого регулятора на единичный скачек ошибки или переходная характеристика может быть представлена в виде суммы реакций параллельных каналов, т.е
h(t)= h1(t) + h2(t) = Кп+(Кп/Ти)t
где h1(t)- реакция П-канала в виде скачка с амплитудой Kп , а h2(t)-реакция И-канала в виде линейно возрастающей функции времени. Причем за время Тифункция возрастает на величину Kп. Поэтому постоянную времени интегрирования Ти часто называют временем изодрома или временем удвоения . Сказанное иллюстрируется рисунком 10.7

Рис. 10.7.
Детализированная структурная схема ПИ-регулятора представлена на рис.10.8.

Рис.10.8.
Математическую модель ПИ-регулятора составляют следующие уравнения
=![]() ;
Uу=
yи (
Кп/Ти)
+ Кп .
;
Uу=
yи (
Кп/Ти)
+ Кп .
Разложение в ряд Тейлора .
Дифференциальные уравнения системы записывают так, чтобы значения регулируемой величины и её производных располагались в левой части уравнения. Значения входных воздействий (управляющих и возмущающих) и их производных располагаются в правой части. При этом уравнение САУ имеет вид:

где a0, a1 … an — постоянные коэффициенты левой части уравнения; b0, b1 … bm — коэффициенты правой части уравнения.
Значение выходной величины САУ обычно приводится к форме с единичным коэффициентом, т.е. коэффициенты уравнения делятся на an, bm.
Обозначим операцию дифференцирования через символ дифференцирования:

иначе
называемый алгебраизированным оператором
дифференцирования
 — тождественно равно pi).
Это условная алгебраическая величина,
представляющая собой функцию времени;
р не обладает свойством коммутативности
и является сомножителем только как py
(px, pf
и т.д.), но не yp (fp,
— тождественно равно pi).
Это условная алгебраическая величина,
представляющая собой функцию времени;
р не обладает свойством коммутативности
и является сомножителем только как py
(px, pf
и т.д.), но не yp (fp,
 p
и т.д.).
p
и т.д.).
Если пользоваться преобразованием Лапласа (или Карсона — Хевисайда) 1, с помощью которого рассмотрение процессов из временной области переносится в комплексную, тогда р будет являться комплексным числом p = c j (иногда вместо р пишут S = c j, о чём будет сказано ниже).
Определим уравнение динамики звена.
Рассмотрим нелинейное звено, входящее в структуру САУ, описываемое нелинейной функцией разложимой в ряд Тейлора в окрестности рабочей точки при внешнем возмущении f = 0:
 . (8.1)
. (8.1)
При работе САУ x и y мало отклоняются от их программных значений x0, y0, исходя из принципа работы замкнутой САУ. Следовательно,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
где характеризует малые отклонения.
В установившемся состоянии уравнение нелинейного звена:
F(x, 0, y0, 0, 0)0 = 0 . (8.2)
Разложим уравнение (8.2) в ряд Тейлора:
 . (8.3)
. (8.3)
Далее, заменив частные производные коэффициентами, получим

где Rn определяет остальные члены порядка малости более двух (n > 2) и стремится к нулю при x 0 и y 0.
Вычитая из уравнения (8.3) уравнение (8.2), опустим знак и, заменяя Rn на 0, получим линеаризованное уравнение в отклонениях:

или в операторной форме:

Следует заметить, что положение о малых отклонениях для возмущения f(t) обычно неприменимо, т.к. они могут иметь значительную величину.
Регулирование по производной.
Регулирование по производным
При регулировании по первой производной от ошибки осуществляется зависимость
u(t)= Kд d (t) / dt,
регулирующее воздействие (выходной сигнал регулятора) пропорционально скорости изменения ошибки. Это регулирование не имеет самостоятельного значения, т.к. в установившемся состоянии производная от ошибки равно нулю и регулирование пропадает. Однако оно может играть весьма большую роль в переходных процессах и вообще в динамике в качестве вспомогательного средства, так такое регулирование позволяет учитывать не только наличие ошибки, но и тенденцию к ее изменению (росту или уменьшению).
Логичным является формирование управляющего воздействия с учетом как самой ошибки, так и скорости ее изменения. Регулятор, реализующий такое управление носит название пропорционально- дифференциального или просто ПД- регулятора. Математически такой закон управления можно записать в виде
u(t)= Kп (t) + Kд d (t) / dt,
что позволяет представить структурно ПД-регулятор в виде параллельного соединения П- и Д- регуляторов с суммированием их управляющих воздействий.
В результате введение регулирование по производной от ошибки увеличивает скорость реакции системы регулирования, то есть повышает ее быстродействие, что приводит к снижению ошибок в динамике.
Часто передаточную функцию ПД-регулятора записывают в виде
Wпд(p)= Kп+ Кдp= Kп(T1p+1)
Логарифмические амплитудно и фазочастные характеристики такого регулятора имеют вид

Рис.10.9.
У идеального ПД-регулятора при воздействии единичной ступенчатой функции на его вход в момент времени t=0 на выходе появляется - функция, имеющая известное аналитическое выражение
при t=0
(t)=
0 при t 0
Аналитическое переходная характеристики идеального ПД-регулятора рассчитывается по формуле
h(t)= Kп [ 1 + (t) ] ,
а график ее представлен на рисунке 10.10.

Рис.10.10.
Формально ПД-регулятор может быть реализован на базе интегрального операционного усилителя по схеме рис.10.11

Рис.10.11.
где Kп= - R2/ R1 и T1=R1C, сек.
Однако работа данной схемы сопровождается значительными высокочастотными помехами, для которых конденсатор C представляет собой сопротивление близкое к нулю. Для повышения устойчивости работы ПД-регулятора последовательно с конденсатором включается дополнительный резистор R3 с небольшим сопротивлением, которое ограничивает токи высокочастотных помех. Этот резистор на рисунке показан штриховой линией.
При наличии такого резистора передаточная функция регулятора приобретает вид
![]() ,
,
где T1=(R1+R3)C, сек и T2=R3C, сек.
Таким образом регулятор приобретает инерционное звено первого порядка, что искажает амплитудно - и фазочастотную характеристику, как показано на рисунке 10.12.

Рис.10.12.
ЛАХ претерпевает излом на частоте =1/ T2 и фаза стремится к нулю при стремлении частоты к бесконечности. Естественно искажается и переходная характеристика регулятор- всплеск, соответствующий t=0, становится конечным и по амлитуде и по длительности. При стремлении R3 к нулю ЛАХ стремятся к ЛАХ идеального ПД-регулятора, но практически никогда их не достигают. Проблема уменьшения влияния дополнительной инерционности возникает всегда при реализации ПД-закона регулирования на аналоговой элементной базе.
Детализированная структурная схема ПД-регулятора представлена на рис.10.13.

Рис.10.13.
Математическую модель ПИ-регулятора составляют следующие уравнения
= - yи /Т2;
Uу= yи [ (Кп/Т2)- (Кп Т1/Т22 )] + Кп Т1/Т2.
В некоторых случаях в закон регулирования могут вводиться производные более высоких порядков -вторая, третья и т.д. Это призвано улучшить динамические характеристики системы, однако техническая реализация введения производных выше второго порядка встречает значительные трудности.
Системы с ПД-регуляторами являются статическими и, следова-тельно, им свойственны с позиции статики все те же свойства и недостатки, что и для систем П-регуляторами. Устранение их достигается ведением регулирования по ПИД-закону.
Реальные дифференцирующее и интегрирующее звенья.
Реальное дифференцирующее звено
Передаточная
функция:  .
.
Это произведение передаточных функций идеального дифференцирующего звена и апериодического звена. Если входная и выходная величина одной размерности, то передаточная функция записывается в виде:

где Т1 – постоянная времени дифференцирующей части, Т2 – постоянная времени инерционной части.
Уравнение звена
Найдем дифференциальное уравнение реального дифференцирующего звена. По определению передаточной функции:

![]()
Переходим от изображений к оригиналам:
![]()
Статическая характеристика: такая же, как у идеального дифференцирующего звена.
Переходная
функция: h(t)=  – такая
же, как весовая функция апериодического
звена.
– такая
же, как весовая функция апериодического
звена.
|
|
|
|

В отличие от идеального дифференцирующего звена у реального нет скачка до бесконечности при t=0. Инерционность сглаживает переходный процесс. Начальное значениеh(0) = K/T. Чем меньше Т, тем ближе звено к идеальному. Установившееся значение переходной функции равно нулю (она асимптотически приближается к этому значению).
ЛАЧХ и ЛФЧХ
Асимптотическая ЛАЧХ реального дифференцирующего звена состоит из двух прямых. Первая прямая проходит в диапазоне частот 0…1/T с наклоном +20 дБ/дек. Эта прямая (или ее продолжение) проходит на частоте ω=1 через значение 20lg(K). Вторая прямая проходит в диапазоне частот 1/Т…∞ с наклоном 0 дБ/дек. Частота сопряжения этих прямых ω=1/Т.
Значения ЛФЧХ лежат в пределах +π/2…0 рад (+90º…0º). На частоте сопряжения φ(Т/2)= +π/4 рад (+45º). В области низких частот ω<<1/Т реальное дифференцирующее звено близко по своим свойствам к идеальному дифференцирующему звену W(p)=Kр, в области высоких частот ω>>1/Т реальное дифференцирующее звено близко по своим свойствам к пропорциональному звену W(p)=K/Т.
Пример ЛАЧХ и ЛФЧХ реального дифференцирующего звена для К<1, Т<1.
|
|
|
|

Примеры реальных дифференцирующих звеньев
Реальный конденсатор
Как было показано выше, идеальный конденсатор (при R=0) можно представить идеальным дифференцирующим звеном с передаточной функцией W(p)=Cp. У реального конденсатора (R≠0) связь между током и напряжением описывается следующим уравнением:
![]()
Переходим к изображениям величин:
![]()
откуда получаем передаточную функцию реального конденсатора:
![]()
где величина RC – это постоянная времени. При R=0 получим передаточную функцию идеального конденсатора W(p)=Cp.
Резистивно-емкостный фильтр высоких частот
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


При скачке входного напряжения U1 выходное напряжение U2 в первый момент времени будет равно входному напряжению, а затем снижается по экспоненте до нуля (по мере заряда конденсатора и снижения тока в цепи конденсатора). Такой фильтр хорошо пропускает сигналы высоких частот (при ω>>1/T значение АЧХ близко к единице) и подавляет сигналы низких частот (при ω<<1/T значение АЧХ близко к нулю).
Механическая дифференцирующая система (демпфер-пружина).

Входной величиной будем считать перемещение поршня x, а выходной величиной – перемещение незакрепленного конца пружины y. Тогда такая система может быть описана как реальное дифференцирующее звено с постоянной времени дифференцирующей и инерционной части Т=δ/с (δ – коэффициент вязкого трения, с – коэффициент жесткости пружины)
|
|
|
|

При перемещении поршня в новое положение в первый момент времени конец пружины переместится на такое же расстояние, а затем возвращается в исходное положение. При движении поршня с постоянной скоростью (dx/dt=const) величина y будет постоянной и пропорциональной этой скорости.
Интегрирующее (астатическое) звено
Его
уравнение
![]() ,
или
,
или
![]() ,
или py
= ku.
,
или py
= ku.
Передаточная функция: W(p) = k/p.
Переходная
характеристика:
![]() (рис.44).
(рис.44).
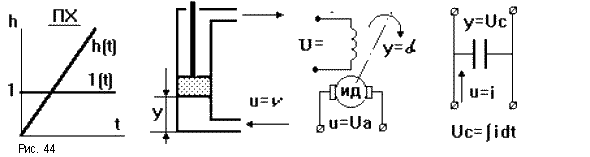
При k = 1 звено представляет собой “чистый” интегратор W(p) = 1/p. Интегрирующее звено неограниченно "накапливает" входное воздействие. Примеры интегрирующих звеньев: электродвигатель, поршневой гидравлический двигатель, емкость и т.п. Введение его в САУ превращает систему в астатическую, то есть ликвидирует статическую ошибку.
Составление дифференциальных уравнений звеньев и систем.