

 Зміст
Зміст
1.Аналіз механізму ................................................................................ 4
1.1Структурний аналіз........................................................................... 4
1.2 Побудова кінематичної схеми для дванадцяти положень механізму... ............................................................................................ 7
1.3 Побудова планів швидкостей для дванадцяти положень механізму................................................................................................ 8
1.4 Побудова плану прискорень для контрольного положення механізму…………………………………………………………….. 10
1.5 Силовий аналіз механізму в контрольному положенні..............12
2.Проектування приводу......................................................................14
2.1 Вибір електродвигуна та кінематичний розрахунок приводу..................................................................................................14
2.2 Розрахунок закритої передачі …...………………………………17
Список використаної літератури....................................................... 26
1.Аналіз механізму
1.1 Структурний аналіз механізму
Структурний аналіз механізму полягає у визначенні класу механізму за класифікацією І.І. Артоболевського. Під час проведення структурного аналізу механізму необхідно врахувати, що вхідною ланкою у механізмах всіх завдань є кривошип 1, оскільки цій ланці задається наперед закон руху.
Послідовність проведення структурного аналізу така:
1)визначається число ступенів вільності механізму;
2)вибираються вхідні ланки механізму (їх число для плоских механізмів завжди дорівнює числу ступенів вільності механізму);
3)механізм розбивається на структурні групи, встановлюється їх клас, і за вищим класом структурної групи визначається клас механізму.
Структурною групою називається кінематичний ланцюг нульового ступеня вільності, який не можна розкласти на більш прості ланцюги нульового ступеня вільності. Це означає, що для структурних груп плоских механізмів справедливе рівняння
 ,=0, (2.1)
,=0, (2.1)
де W - число ступенів вільності механізму;
п - число рухомих ланок у механізмі;
р5 - число кінематичних пар 5-го класу;
р4 - число кінематичних пар 4-го класу.
Для важільних механізмів р4 = 0, а тому рівняння (2.1) приймає вигляд
Зп-2р5 = 0. (2.2)
Рівнянню (2.2) задовольняють такі значення п i р5;
n |
2 |
4 |
6 |
8 |
і т.д. |
p5 |
3 |
6 |
9 |
12 |
і т.д. |
Визначаємо число ступенів свободи (рухомість) механізму за формулою Чебишева:
 ,
,
де n=3 – число рухомих ланок механізму;
p5=4 – число кінематичних пар V-го класу;
p4=0 – число кінематичних пар IV-го класу.
Так як W=1, то це означає, що механізм повинен мати одну вхідну ланку. За вхідну ланку вибираємо ланку 1, що зумовлено тим, що ця ланка приводиться в обертальний рух від привода.
Розбиваємо механізм на структурну групу “ 2-3”
Клас структурної групи визначається найбільшим числом внутрішніх кінематичних пар, що утворюють замкнений контур. Якщо ж до складу структурної групи входить дві ланки, то така структурна група звжди є структурною групою другого класу
Група II-го порядку, II-го класу


(умова
існування структурної групи виконується)
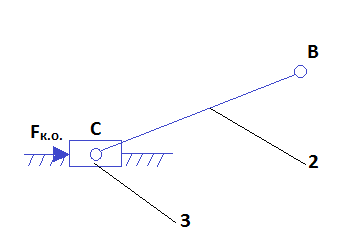
кривошипно-повзуни механізм
Отже, кривошипно-повзуний механізм – II-го класу.
1.2 Побудова 12-ти положень механізму
Для заданого механізму побудувати кінематичну схему для 12-ти його положень. Приймаємо за нульове таке положення , при якому ланка , до якої прикладена сила корисного опору , знаходилася в одному з крайніх положень. Ці крайні положення визначаються на схемі, коли ланки 1 і 2 будуть знаходитись на одній прямій. Від цього положення розбиваємо траєкторію руху вхідної ланки на 12 рівних частин. Побудова виконується методом засічок в одному із стандартних масштабів: µl=0,001м/мм; 0,002м/мм; 0,025 м/мм; 0,005 м/мм; 0,0005 м/мм; 0,0001 м/мм і т.д.
LAB=0,4/0,001=400mm
LBC=1,25/0,001=1250mm
Одинадцять положень механізму будуються тонкими лініями, а одне контрольне положення будується основною лінією (задається кутом φ0).
Вигляд кінематичної схеми для 12-ти положень механізму показаний на рисунку