

Глава 3. Электромеханические свойства двигателей переменного тока
Машины переменного тока имеют существенное преимущество перед коллекторными двигателями постоянного тока – они могут быть выполнены бесконтактными, что обеспечивает больший ресурс, высокую надежность и безопасность. Двигатели переменного тока находят применение, как в управляемых, так и в неуправляемых приводах. В настоящей главе мы рассмотрим характеристики наиболее распространенных машин переменного тока асинхронных и синхронных.
3.1. Электромеханические свойства асинхронных двигателей
Назначение асинхронного двигателя в наибольшей степени определяет его конструкцию. В общепромышленных неуправляемых приводах малой и средней мощности используются двигатели с короткозамкнутым ротором. В более мощных приводах, и там где требуется ограничение пусковых токов, применяют двигатели с фазным ротором. Приборную автоматику обслуживают приводы на малоинерционных управляемых асинхронных двигателях. В последнее время, в связи с развитием различных вариантов частотного управления, во всех типах управляемых приводов находят применение асинхронные двигатели с короткозамкнутым ротором. Поэтому наибольшее внимание уделим классическим трехфазным двигателям с короткозамкнутым и с фазным ротором.
3.1.1. Математическое описание процессов преобразования энергии в асинхронных машинах
Математическое описание электромагнитных процессов в машинах переменного тока намного сложнее, чем в машинах постоянного тока. Это объясняется не только тем, что их питание осуществляется переменным током, но и тем, что в таких машинах имеются несколько взаимосвязанных электрических контуров. В результате при описании электромагнитных процессов мы получаем систему дифференциальных уравнений высокого порядка. В теории электромеханического преобразования энергии существуют различные методы упрощения исходных уравнений. Наиболее распространенным из них является представление электрической машины в виде идеализированного двухфазного электромеханического преобразователя. В идеализированной машине в воздушном зазоре имеем круговое поле, а высшие гармоники отсутствуют. Методы перехода от исходной трехфазной машины к идеализированной хорошо разработаны в общей теории электромеханического преобразования энергии – на них останавливаться не будем. Отметим лишь, что в результате преобразований мы получим идеализированную машину, имеющую две обмотки на роторе и две обмотки на статоре, расположенные по ортогональным осям α и β (рис. 3.1). Для такой машины справедлива система уравнений:
(3.1)
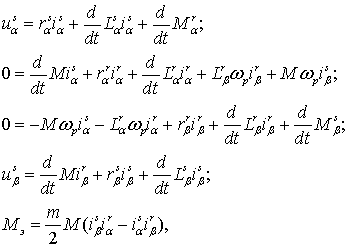
где uαs,uβs – напряжения на обмотках статора; iαs,iαr,iβs,iβr – токи в обмотках статора и ротора по осям α и β; Lαs,Lαr,Lβs,Lβr – полные индуктивности обмоток статора и ротора по осям α и β; m – число фаз двигателя; Mэ – электромагнитный момент двигателя.

Рис. 3.1. Модель идеализированной асинхронной машины
Полная индуктивность каждой обмотки может быть записана уравнением
L=M+Lσ
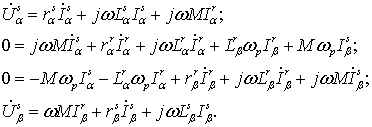
где M – взаимная индуктивность между обмотками ротора и статора по осям α и β; Lσ – индуктивность рассеяния обмотки. Система уравнений (3.1) достаточно точно описывает статические и динамические процессы в асинхронном двигателе, если принят гармонический закон изменения напряжений uα и uβ. Однако она является существенно нелинейной и в таком виде практически не используется. Для упрощения математического описания электромагнитных процессов осуществляют преобразования исходных уравнений. В частности, если в первых четырех уравнениях системы (3.1) провести замену d/dt↔jω, получим систему уравнений асинхронного двигателя в установившемся режиме:
(3.2)
Так
как рассматривается симметричная
машина, целесообразно параметры обмоток
обозначитьLs=Lαs=Lβs, Rs=rαs=rβs, Lr=Lαr=Lβr, Rr=rαr=rβr,
а также ввести понятия xs=ωLs,xr=ωLr –
полные индуктивные сопротивления
статора и ротора, x0=ωM –
сопротивление взаимной индукции. Кроме
того, обозначим результирующие векторы
напряжений ![]() и
токов
и
токов ![]() ,
, ![]() .
Тогда от четырех уравнений напряжений
(3.2), если обратиться к обобщающим векторам
напряжений, токов и сопротивлений, можно
перейти к двум уравнениям:
.
Тогда от четырех уравнений напряжений
(3.2), если обратиться к обобщающим векторам
напряжений, токов и сопротивлений, можно
перейти к двум уравнениям:
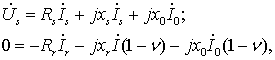
(3.3)
где ν=ωр/ω.
Введем понятия скольжение ротора
относительно поля статора s=(ω−ωр)/ω и
ЭДС холостого хода ![]() .
Тогда систему уравнений асинхронной
машины можно представить в виде:
.
Тогда систему уравнений асинхронной
машины можно представить в виде:
(3.4)
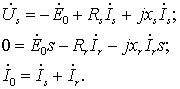
Обозначим zs=Rs+jxs, zr=Rr+jxr, разделим второе уравнение системы (3.4) на s и с учетом того, что Rr/s=Rr+Rr×(1−s)/s, получим
(3.5)

Полученные уравнения описывают электромагнитные процессы асинхронного двигателя в установившемся режиме. По ним строятся векторные диаграммы и схемы замещения двигателя. В частности, если перейти к приведенным параметрам роторной цепи, систему уравнений (3.5) можно представить в виде
(3.6)

Векторная диаграмма, соответствующая уравнениям (3.6) представлена на рис. 3.2.
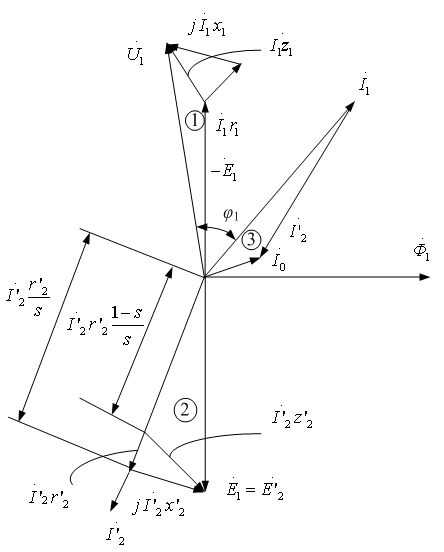
Рис. 3.2. Векторная диаграмма асинхронной машины