

4.3 Выбор электродов для электромиостимуляции мышц парализованной конечности
Для электростимуляции мышц используют мягкие накожные электроды прямоугольной формы размерами в зависимости от вида стимулируемой мышцы от 1х3 до 6х24 см, изготовленные на основе токопроводящей углеродистой ткани типа УУТ-2. После выбора стимулируемых мышц на их поверхности устанавливаются электроды, смоченные водой или физиологическим раствором, закрепляемые на конечностях фиксирующими манжетками. Места расположения электродов определяются анатомической локализацией соответствующих мышц, Активный электрод устанавливается на двигательную точку мышцы, а индифферентный помещается на расстоянии 2—8 см от активного электрода. В ряде случаев в зависимости от конкретных задач стимуляции данной мышцы можно сдвигать электроды как проксимальнее, так и дистальнее двигательной зоны. Типичная схема расположения электродов на пациенте при МЭСМ приведена на рис.3
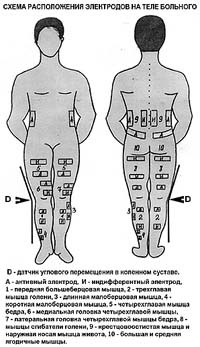
Рис.3 Схема расположения электродов для стимуляции мышц
Нижних конечностей
Для ИКД посредством МЭСМ мышц должны использоваться поверхностные электроды из токопроводящей резины или углеродистой ткани, прямоугольной формы с соотношением сторон 1:4–5 и расположением перпендикулярным ходу мышечных волокон. Для МЭСМ ягодичной мышцы применяют длинные электроды размером 415–20 см. Активный размещают на уровне верхней трети ягодичной области, индифферентный – на уровне ягодичной складки. Для ЭС трехглавой мышцы голени активный электрод размером 46–8 см размещают над брюшком внутренней и наружной головок икроножной мышцы, индифферентный – над кабаловидной мышцей. Для электростимуляции передней большеберцовой мышцы использовали электроды размером 44–2 см. Смоченные водой электроды закрепляли на поверхности тела с помощью фиксирующих резиновых манжеток (рис.4).
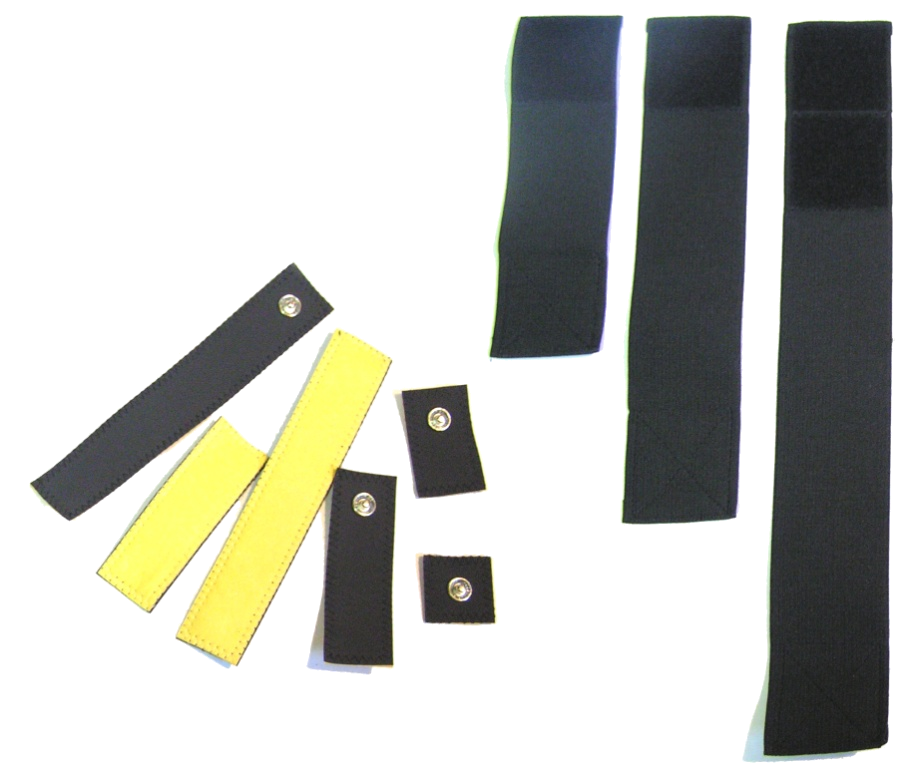
Рис. 4. Электроды и фиксаторы: а – электроды, б – фиксаторы.
4.4 Совмещение электромиостимуляции с механическими движениями аппарата по пассивной разработке суставов
В предлагаемом нами аппарате синхронизация МЭСМ должна осуществляться с механическими движениями аппарата по пассивной разработке суставов. При этом временная программа МЭСМ парализованных конечностей в течение цикла работы должна задаваться с помощью кинематических параметров, формирующих ходьбу человека.
Задачам синхронизации программы ЭС мышц с фазами работы аппарата (например для разработки коленного сустава) наиболее полно отвечают угловые перемещения в коленном суставе в переносную фазу цикла ходьбы, измеряемые с помощью датчиков углов коленного сустава.
Использование датчиков коленного угла обеспечивает точную индивидуальную настройку работы электростимулятора в соответствии с фазами локомоторного цикла. Поэтому включение стимулирующего сигнала мышц сгибателей или разгибателей бедра, а также ягодичных мышц и икроножных мышц парализованной конечности в зависимости от выполняемого движения на аппарате, имитирующем ходьбу именно в этот момент представляется наиболее физиологичным.
Таким образом, временная программа МЭСМ мышц парализованной конечности при движении, имитирующем ходьбу основывается на принципе избирательного усиления естественной программы возбуждения и сокращения мышц нижних конечностей в течение локомоторного цикла. Фазы искусственного возбуждения мышц должны совпадать с фазами их естественного возбуждения и сокращения, поскольку только при этом условии возможна коррекция и нормализация работы мышц.
В настоящее время на рынке предлагается большое количество аппаратов для пассивной разработки суставов, которые применяются в травматологической практике у пациентов с заболеваниями суставов. Наиболее современные (представлены на рис.5 ниже) имеют стоимость более 4500 евро.

Рис.5 Образец аппарата для пассивной разработки коленного сустава
После создания аналога приведенного выше аппарата и установления точных параметром МЭМС, планируется создание пакета компьютерных программ, с целью синхронизации работы механического аппарата и электромиостимуляции мышц парализованных конечностей.
Ниже приводится принципиальная схема работы разрабатываемого медицинского комплекса, совмещающего в себе медицинский прибор и программное обеспечение.
Коммуникационный кабель
Соединительные
кабели
Интерфейсный кабель
Датчики











1

2
Рис.6 Схема работы разрабатываемого медицинского комплекса