

Влияние пку на характеристики системы
Рассмотрим поведение САР в случае отсутствия ПКУ.
Эквивалентная передаточная функция замкнутой САР по задающему воздействию с ПКУ:

Эквивалентная передаточная функция замкнутой САР по задающему воздействию без ПКУ:

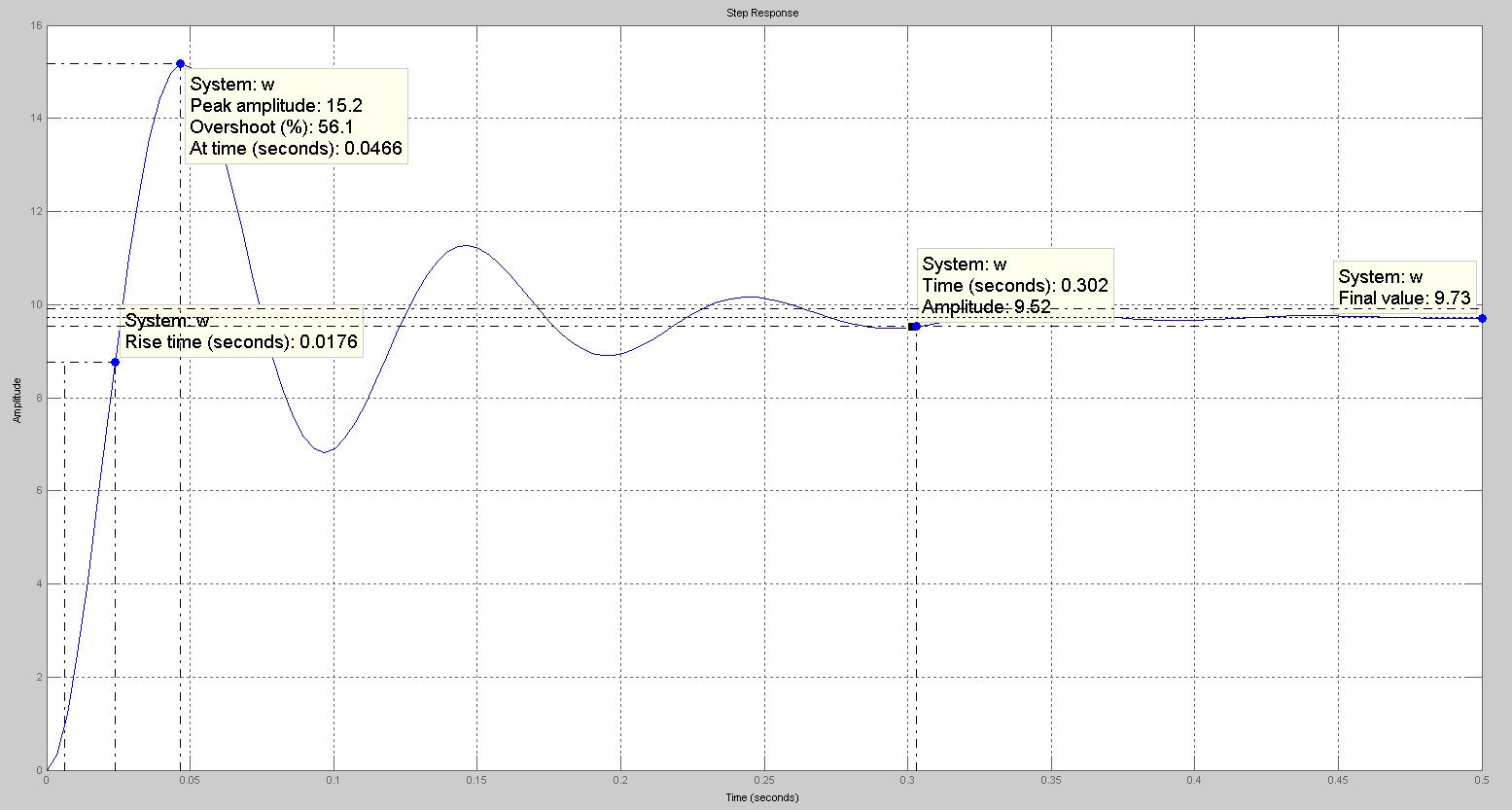
Рис. 16 Переходная функция замкнутой САР по задающему воздействию без ПКУ.
Из графика видно, что время переходного процесса увеличилось на 0.102 с. Кроме того, параметр перерегулирования увеличился на 10.7%
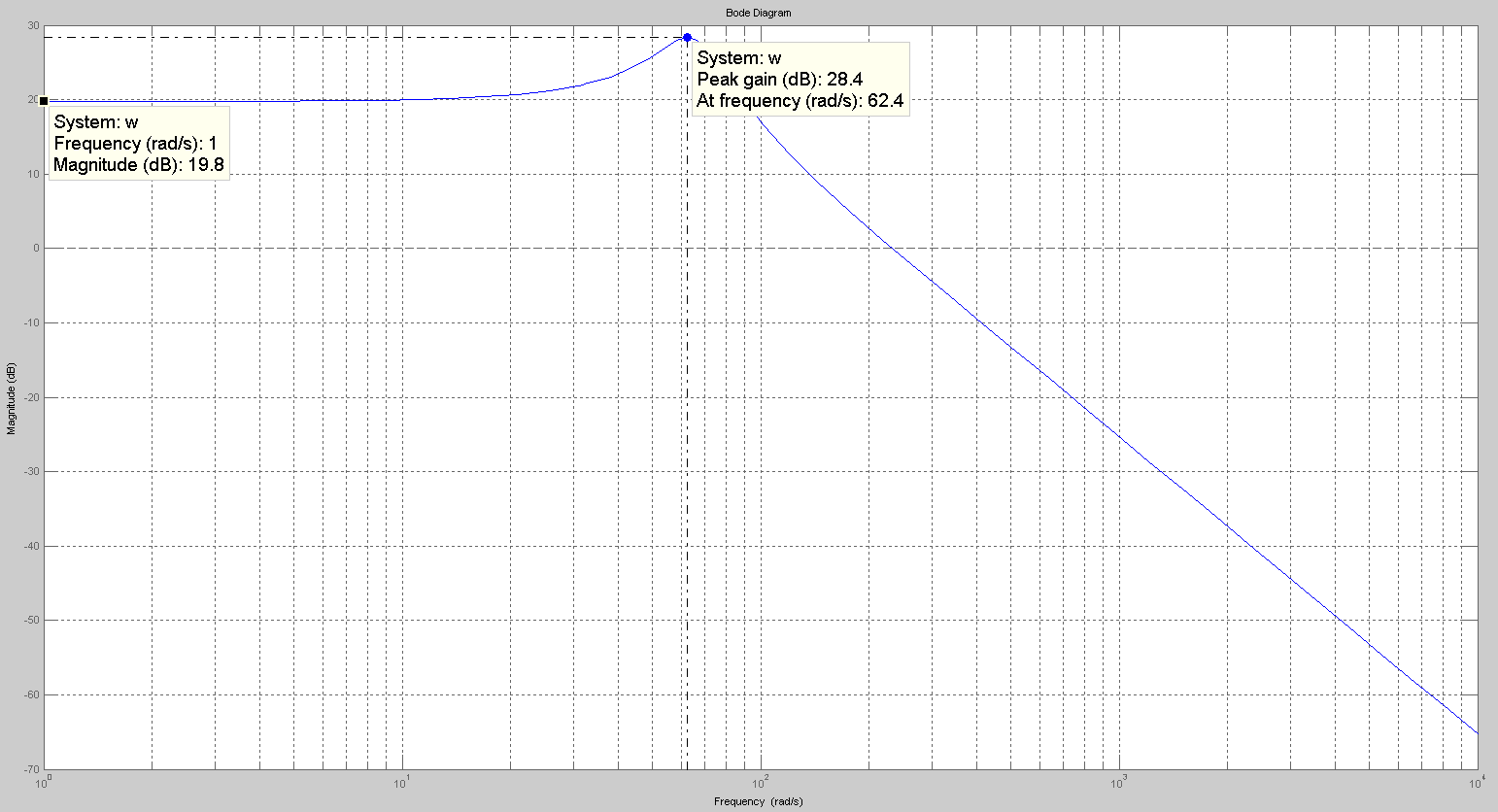
Рис. 16.2 ЛАЧХ замкнутой САР по задающему воздействию без ПКУ.
Используя ЛАЧХ, рассчитаем новое значение для колебательности:

Значение
 без ПКУ также лежит в пределах допустимого,
однако новое значение стало ближе к
границе допустимого.
без ПКУ также лежит в пределах допустимого,
однако новое значение стало ближе к
границе допустимого.
Таким образом, ПКУ улучшает динамические свойства системы, уменьшая ее колебательность, перерегулирование и время переходного процесса.
Установившаяся ошибка системы
Полная
ошибка регулирования
 состоит из 2 составляющих:
состоит из 2 составляющих:

где
 – ошибка регулирования, вызванная
задающим воздействием
– ошибка регулирования, вызванная
задающим воздействием
 ;
;
 – ошибка регулирования, вызванная
возмущающим фактором
– ошибка регулирования, вызванная
возмущающим фактором
 .
.
Используя
выражения и теорему о предельных
значениях
 ,
при типовых воздействиях
,
при типовых воздействиях
 ,
,
 установившиеся ошибки системы можно
определить по следующим выражениям:
установившиеся ошибки системы можно
определить по следующим выражениям:



где
 – установившееся значение полной
ошибки;
– установившееся значение полной
ошибки;
 – установившееся значение ошибки,
вызванной задающим воздействием;
– установившееся значение ошибки,
вызванной задающим воздействием;
 – установившееся значение ошибки,
вызванной возмущающим фактором.
– установившееся значение ошибки,
вызванной возмущающим фактором.
Найдем
установившееся значение ошибки, вызванное
задающим воздействием( :
:
 (рад/с)
(рад/с)
Значение установившейся ошибки по задающему воздействию в системах стабилизации может быть сведено к нулю путем масштабирования, т.е. подбором подходящего g(t). При сведении установившейся ошибки по задающему воздействию к нулю, полная установившаяся ошибка системы будет характеризоваться лишь ошибкой, вызванной возмущающим воздействием.
Найдем установившееся значение ошибки, вызванное возмущающим воздействием:
 (рад/с)
(рад/с)
где
 - момент сопротивления.
- момент сопротивления.
Найдем установившееся значение полной ошибки регулирования:
 (рад/с)
(рад/с)
Полная установившаяся ошибка регулирования говорит о том, что вследствие задающего воздействия, выходная величина, а именно угловая скорость уменьшается на 2.552 рад/с.
Вывод: В ходе данной курсовой работы была рассмотрена система автоматического регулирования частоты вращения двигателя постоянного тока. Исследование было проведено с помощью математических методов и программных пакетов MathCad и Matlab.
Данная система устойчива, что было доказано четырьмя различными способами: по корням характеристического уравнения, по критериям устойчивости Михайлова, Найквиста и Гурвица.
Исследованная
САР имеет хорошие показатели качества
регулирования, а именно относительно
небольшое время
переходного процесса (tпп=0.2
с), а также допустимое значение
колебательности ( 1.273).
Однако, значение перерегулирования
σ=45.4% является неудовлетворительным
т.к. выходит за пределы максимально
допустимых 30% .
1.273).
Однако, значение перерегулирования
σ=45.4% является неудовлетворительным
т.к. выходит за пределы максимально
допустимых 30% .
Кроме того, было изучено влияние пассивной корректирующей RC – цепи на характеристики системы. ПКУ увеличивает динамические свойства системы, а именно уменьшает время переходного процесса, перерегулирование и колебательность системы, что было экспериментально подтверждено.
Список литературы
Теория автоматического управления. Курсовая работа: метод. указания для студентов спец. 220102 «Управление и информатика в технических системах» ИДО / Сост. Е.М. Яковлева, С.В. Замятин. – Томск: Изд. ТПУ, 2009 - 115 с.
http://ru.wikipedia.org/wiki/Теория_автоматического_управления
http://www.toehelp.ru/theory/tau/contents.html